525
Drone with "claws" sits on the wall and ceiling

disaster zone or man-made disaster. Impenetrable jungle. Battlefield. All these places have something in common: they are perfectly suited for autonomous unmanned aerial vehicles, but there ... almost nowhere to sit (for example, to set the fixed sensors or a video camera). UAV just hangs in the air at a given point and hangs until the end of the battery charge. This significantly limits the scope of use of such a useful tool.
Graduate of biomimetics Laboratory and Stanford University maneuvering technology offered a solution: the UAV must be attached to the inclined surfaces, walls, ceiling, or the trunks of trees - everything that has nearby. Then he can turn off the motors and working in a steady state for many hours and days.
Dvoolno engineer proposed a simple and effective mechanism by which multicopter fixed on a flat surface, for example, on the same wall or ceiling.
The basis taken a previous development - a robot SCAMP, which is attached to the steep wall and moves them
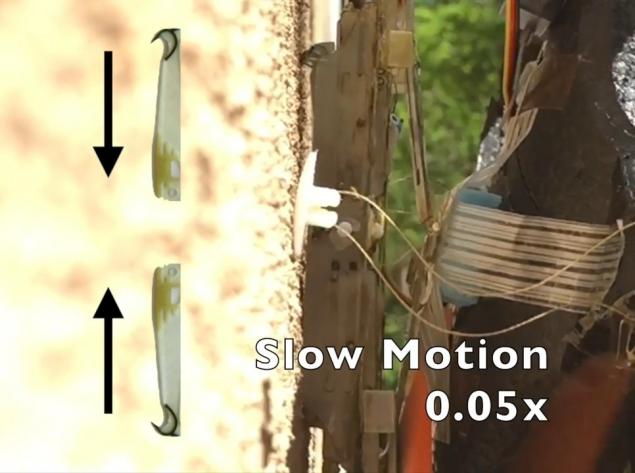
. The mechanism of improved: added a kind of a "tail" that the drone strikes in the wall before planting, to create a stable pivot point to move to the upright position. If the hit rate is correct, then the propellers automatically pressed against the machine.
Hitching to the surface by special pneumatic platform with tiny hooks - "claws»
.
This coupling method allows not only secured on smooth surfaces, but also on rough or curved surfaces as tree trunks. On the ceiling to attach even easier, because you do not have to use support and move to a vertical position.

While the development of a promising, but the author of the post-graduate student Jian Hao (Hao Jiang) said that still have a lot of work. The robot is not clings to each item and have not yet learned how to choose suitable. Engineers have developed an algorithm for determining an unsuccessful hook for rooms, but have not yet done so to open spaces where there is a breeze, and there are unpredictable surface.
Source: geektimes.ru/post/275754/




















Car Model S crashed again - and again on the driver's fault. Tesla checked logs
The world's largest solar park and a record low prices for solar energy in Dubai