525
雄蜂与“魔爪”坐在墙壁和天花板

中国 灾区的或人为的灾难。坚不可摧的丛林。战场上。所有这些地方有一个共同点:他们都非常适合自主无人机,但也有......几乎无处坐(例如,设置固定的传感器或摄像机)。 UAV刚刚挂在空气中,在一个给定的点和挂起直到电池充电结束。这显著限制使用这样的有用的工具的范围。搜索结果 仿生实验室和斯坦福大学操纵技术的毕业生提供了一个解决方案:必须无人机连接到倾斜表面,墙壁,天花板或树木树干 - 附近有一切。然后,他可以关掉马达和在稳定状态下工作几个小时和天。搜索结果 Dvoolno工程师提出了一种简单而有效的机制,通过它multicopter固定在平坦表面上,例如,在相同的壁或天花板上。
中国 所采取的基础的先前发展 - 机器人SCAMP,其附接至所述陡壁并移动它们搜索结果。 改进的机制:增加了一个样的“尾巴”,在墙壁上的无人机打击播种前,建立一个稳定的支点移动到直立位置。如果命中率是正确的,那么螺旋桨自动压在机器。搜索结果 用小钩子搭上到表面经特殊的气动平台 - “魔爪»博客。
 搜索结果
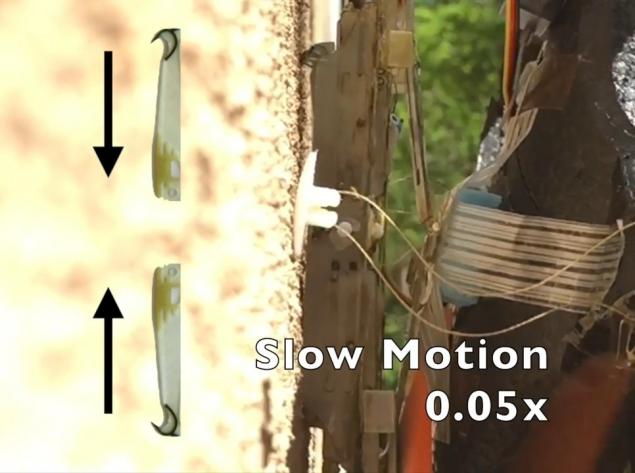
此耦合方法允许不仅固定在光滑的表面,而且在粗糙的或弯曲的表面,树干。天花板上的附着更容易,因为你没有使用支持,并移动到垂直位置。搜索结果
搜索结果
此耦合方法允许不仅固定在光滑的表面,而且在粗糙的或弯曲的表面,树干。天花板上的附着更容易,因为你没有使用支持,并移动到垂直位置。搜索结果
 搜索结果
虽然有前途的发展,但硕士研究生煎好(浩江)的作者说,仍然有很多的工作。该机器人是不是攀附每个项目还没有学会如何选择合适的。工程师们已经开发出用于确定房不成功的钩的算法,但还没有这样做的空旷之地有微风,还有是不可预知的表面。搜索结果
来源:geektimes.ru/post/275754/
搜索结果
虽然有前途的发展,但硕士研究生煎好(浩江)的作者说,仍然有很多的工作。该机器人是不是攀附每个项目还没有学会如何选择合适的。工程师们已经开发出用于确定房不成功的钩的算法,但还没有这样做的空旷之地有微风,还有是不可预知的表面。搜索结果
来源:geektimes.ru/post/275754/