2857
Intelligent wheelchair-transformer
Hi Habr!
I want to tell you about our project to build a cross-country electric wheelchair. In a technical sense, this is not just a stroller, a real robot, I would even say - a robot-transformer.

What should this stroller?
I want to tell you about our project to build a cross-country electric wheelchair. In a technical sense, this is not just a stroller, a real robot, I would even say - a robot-transformer.

What should this stroller?
- Most disabled can not have multiple elektrokolyasok, so it should be as universal. To her it was possible to move around the home and on the street and in the woods, and so it was possible to independently and climb stairs to climb up on the curb. Hence it follows, and the second paragraph.
- The width of the stroller is not more than 650 mm, that could in any doorway and a lift to drop. The length of not more than 1100 mm.
- Safe.
- cheap. I think there is no comment.
- Energy Efficiency, as batteries are expensive.
The main issue requiring drastic structural approaches - is, of course, climbing stairs. It was considered a very large number of embodiments, ranging from conventional large-diameter wheels with deep tread and finishing wheel-transformer turns into a stepping device. Everywhere there were the problems: some solutions were not safe, some options are only suitable for one type of stairs (height and depth of a certain degree), etc. The best option turned caterpillar mover.
Our first cool idea, doomed to failure
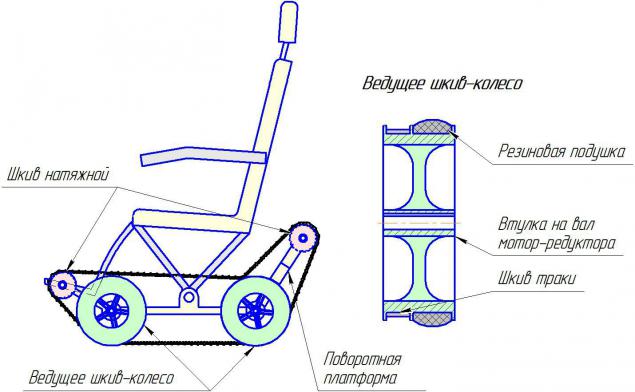
The idea was as follows: 4 gearmotor (AWD), swivel chair, swivel rear platform and 4-wheel pulley with strained tracks. The chip pulley-wheels that on a flat surface does not touch the ground truck and thus not create vibrations and additional friction. Carriage rides on rubber pads pulley-wheels. And when approaching an obstacle, such as a ladder truck to engage with this very obstacle.
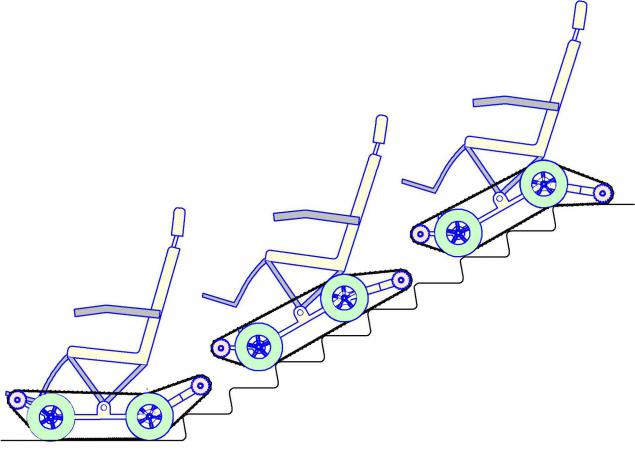
Movement of the stairs in the following manner:
- Turntable lowered for easy arrival to the stairs.
- After arrival, the rear platform falls in line with the main platform. Thus, the total length of the track base provides good grip and safety of the coup.
- When Congress with ladder rear platform is lowered to prevent a sharp drop. While lifting the chair rotates automatically, keeping the horizontal position. Walking down the stairs takes place exactly in the same way, but in reverse order.
The creation of the first prototype h5> To test the idea, we set about creating a prototype. Control electronics have decided not to invent and use 2 remote from other elektrokolyasok (each of which controls a 2-E engine). Drive and rear seat platform is controlled via three-position toggle switch.
Making truck - is a different story altogether. Basis of homemade truck - is timing belts from the Impreza. Straps sewn together. As lug segments were cut and sewn belt screws.

Techniques used kolkhoz, as finance all from his pocket. The cost of producing 4-track on these drawings (even in China) starts from 70 th. Rub. (Including manufacturing of equipment). As a result of improvised track enough to stroller up the stairs without a passenger. From payload truck broke at the connection.
On the creation of the first prototype took about 80 thousand. Rub., Including rent garage workshop.
According to the test results became clear:
- On the track with cleats can climb stairs. Even if the level of different sizes and cleaved.
- The idea with swivel rear platform works.
- The scheme with a pulley-wheel doomed to failure. The main problem is that for climbing stairs and driving on a flat surface needs a fundamentally different speeds and times differ by about 10 times. Of course, it is possible to install more power actuators, whereas the motion of the plane engine load will be significantly less than the nominal, and ascending stairs below the nominal voltage (to decrease speed). In this scenario, about the low cost and energy efficiency can be forgotten.
Use an electric - transformer.
There were several solutions to this problem:
- Make a gearbox with gear shifting. Specifically, the gear 4, or at least 2 (in the left and right sides).
- Track and wheels rotate on different drives.
- Divide wheeled and tracked base. In this wheel and truck will be driven by a single drive with a reduction on the track. After a hearty analysis and the calculations revealed that the last option is the most cost-effective and technically feasible.
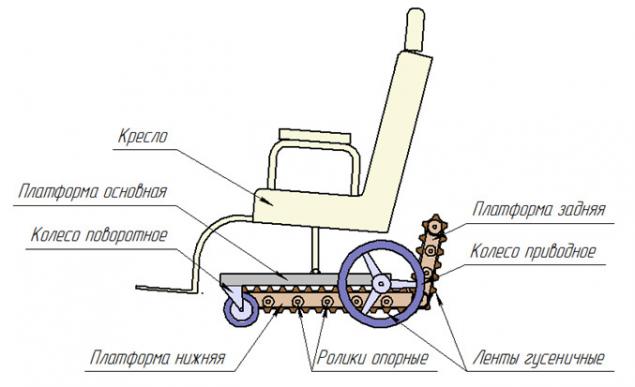
On a flat surface crawler base (bottom and back) are in the highest position and do not hinder the movement of the carriage. If necessary, overcoming obstacles and the lower rear platform is lowered, and the carriage stands on the caterpillar. As a result, due to the mechanical transmission from the motor shaft to the drive pulley and truck wheels and the difference in diameter of the pulley design achieved a tenfold difference in speed and torque.
Implementing the ideas in iron
This time to the manufacture of the prototype came more profound way: ordered in China dates trucks, drive electronics bought. Machining, laser cutting and bending booked at enterprises of Novosibirsk. Assembly and welding, of course, carried out themselves. All works like a classic startup was performed in a garage workshop.
The control system consists of a control unit and an executive who communicate by bluetooth. Wireless remote control is especially necessary in the case where a disabled person can not control himself joystick controls and sidecar accompanying person. When climbing the stairs to the maintainer does not have to reach for the arm of the chair of the joystick, holding remote control in hand, he controls the movement visually.
Automatic system to maintain horizontality seats based on accelerometer. Since the system is not highly dynamic, it is possible to do without the gyro and reduce math. On the mechanism of lowering-lifting lower and rear platforms have feedback sensors. The position information is transmitted to the remote platforms. System power is provided by gel batteries 24 (in the next version will use lithium-ion).
Tests were carried out on the steps of flats:
Problems to be solved, still enough. But one thing is for sure - it works! On the development of wheel-track system with movable platforms patent pending. Further, our actions are aimed at completion of electronics, increased torque on the tracks, changing the profile tracks to best engage and, of course, create a presentable appearance of the product.
On the importance of this development, we have removed the video:
Now we can give a disabled person's freedom of movement. Stairs houses, shops, a cinema, a couple of flights of stairs on the way to a friend or girlfriend will seem to them suschimi trivia.
Source: habrahabr.ru/post/222645/


























Test home robot version 0.3.1
Dedicated servers under water, literally !? Prospects for breeding fish in servers ?!