2871
Розумний візок-трансформер
Гей, Habr!
Я хочу розповісти про наш проект, щоб створити все-розійне крісло з електричним приводом. У технічних умовах це не просто коляска, але реальний робот, я бажав би сказати трансформаторний робот.

Що робити це?
Головне питання, яке вимагає кардиналних конструктивних підходів, звичайно, сходження сходів. Розглянуто дуже велику кількість виконань, починаючи від звичайних коліс великого діаметра з глибоким протектором і закінчуючи перетвореним колесом, що перетворюється в ходовий пристрій. У будь-який час були проблеми: деякі рішення не були безпечними, деякі варіанти були придатні тільки для одного типу сходів ( певна висота і глибина кроку), тощо. Найкращим варіантом стала гусениця двигуна.
Наша перша відмінна ідея, допущена до відмови
Ідея була наступним чином: 4 мотори редуктора (приводний привід), крісло-купе, задня платформа і колісні колеса з розтягнутими доріжками. Те, що на плоскій поверхні доріжок не доторкнеться землі і, відповідно, не створює вібрацій і додаткового тертя. Колісні проїзди на гумових тягарках-колесах. А коли ви вражаєте перешкоду, такі як сходи, трек залучає до цього дуже перешкоди.
499.00 Р
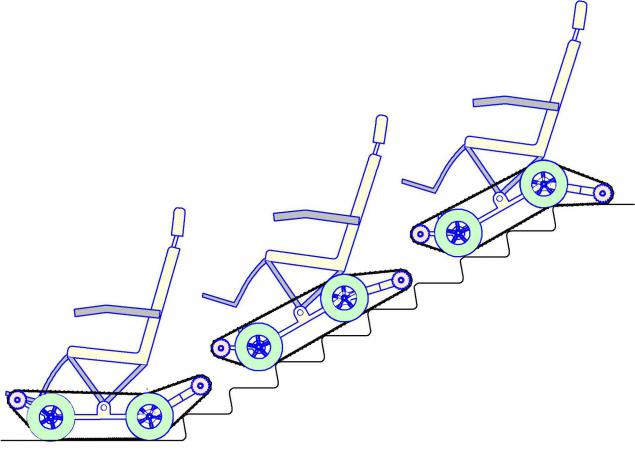
Рух на сході здійснюється наступним чином:
 , м. Київ
, м. Київ
Щоб перевірити ідею, ми створили прототип. Контрольні електронні пристрої вирішили ще не проявлятися, але використовувати 2 віддалені від інших електричних колісних крісел (вчитель яких контролює 2 двигуни). Приводи крісельної та задньої платформи контролюлися за допомогою трьохположених вимикачів.
Виробництво вантажівок – окрема історія. Основою домашньої доріжки є ремені від Impresa. Стрічки зшиваються разом. Відрізки клинових стрічок вирізати і пришити гвинтами.

Зробки були використані колективні ферми, оскільки все було фінансовано з власної кишені. Вартість виготовлення 4 таких доріжок за кресленнями (навіть в Китаї) починається від 70 тис. рублів. (в тому числі виготовлення приладів). У результаті досить саморобні доріжки для колісного крісла, щоб піднятися на сходи без пасажира. З корисного навантаження трек зламав на місці з'єднання.
Створення першого прототипу приймала близько 80 тис. рублів, в тому числі оренда гаражного цеху.
Згідно з результатами тесту, це стало ясно:
Електричний колясник – трансформатор.
У цій задачі було кілька рішень:
92310р.
На рівну поверхню гусениці (низ і задньої) знаходяться в крайньому верхньому положенні і не заважають руху колісного крісла в цілому. Якщо необхідно долати перешкоду, нижню і задню платформу опускаються, а на трасах стоїть коляска. В результаті механічна передача від моторного валу до кермового шківа доріжки і різниці діаметрів коліс і шківа, можна було досягнути конструкції, що заглиблюється в швидкості і моментах.
Реалізація ідеї в прасці
Цього разу вони підходили до виробництва прототипу більш ретельно: вони замовили необхідні треки, диски та придбані електронні пристрої в Китаї. На підприємствах Новосибірська замовлена механічна обробка, лазерне різання та гнучкість. Збір і зварювання, звичайно, виконували себе. Усі роботи в класичному стартапі проводилися в майстерні гаража.
Система керування складається з пульта дистанційного керування та виконавчого модуля, який спілкується з синотом. Бездротовий пульт особливо необхідний у випадку, коли відключена людина не може контролювати себе джойстик, а інвалідний візок регулюється супроводжуваною особою. Під час сходження сходів, супроводжуюча людина не повинна доходити до ручної ручки для джойстику, що веде дистанційну руку, він візуально контролює рух.
Автоматична система підтримки горизонтальності крісла на основі акселерометра. Оскільки система не відрізняється високою динамічністю, можна обійтися без гіроскопа і зменшити математичні розрахунки. На нижніх і задніх платформах є датчики зворотного зв'язку. Інформація про позицію платформ передається на пульт дистанційного керування. Система працює від 24V гелійових батарей (на наступних версіях ми використовуємо літій-іон).
Тести були проведені на кроках багатоповерхових будинків:
Проблемні проблеми вирішуються ще досить. Але одне, напевно, це працює! Патентне застосування було подано для розробки колісно-трекерної системи з нащадними платформами. Наші подальші дії спрямовані на поліпшення електроніки, збільшення моменту на доріжках, зміну профілю доріжки для кращого залучення та, звичайно, створення презентабельного зовнішнього вигляду виробу.
На тему значення цього розвитку ми зробили відео:
Тепер ми можемо надати відключений свободу руху. Сходи будинку, магазину, кіно, пара рейсів сходів на шляху до друга або подруга здаються їм нічого.
Джерело: habrahabr.ru/post/222645/
Я хочу розповісти про наш проект, щоб створити все-розійне крісло з електричним приводом. У технічних умовах це не просто коляска, але реальний робот, я бажав би сказати трансформаторний робот.

Що робити це?
- Більшість людей з обмеженими можливостями не можуть мати декілька колісних візок, тому вона повинна бути максимально універсальною. Так що можна пересуватися на ньому в домашніх умовах, а на вулиці, і в лісі, і так, щоб можна самостійно підняти сходи і підняти бордюр. Це також веде до другої точки.
- Ширина коляски не більше 650 мм, тому можна ввести будь-який отвір і ліфт. Довжина не більше 1100 мм.
- Сейф.
- Дешеві. Я думаю, що коментарі тут є зайвими.
- Енергоефективність, оскільки акумулятори дорогі.
Головне питання, яке вимагає кардиналних конструктивних підходів, звичайно, сходження сходів. Розглянуто дуже велику кількість виконань, починаючи від звичайних коліс великого діаметра з глибоким протектором і закінчуючи перетвореним колесом, що перетворюється в ходовий пристрій. У будь-який час були проблеми: деякі рішення не були безпечними, деякі варіанти були придатні тільки для одного типу сходів ( певна висота і глибина кроку), тощо. Найкращим варіантом стала гусениця двигуна.
Наша перша відмінна ідея, допущена до відмови
Ідея була наступним чином: 4 мотори редуктора (приводний привід), крісло-купе, задня платформа і колісні колеса з розтягнутими доріжками. Те, що на плоскій поверхні доріжок не доторкнеться землі і, відповідно, не створює вібрацій і додаткового тертя. Колісні проїзди на гумових тягарках-колесах. А коли ви вражаєте перешкоду, такі як сходи, трек залучає до цього дуже перешкоди.
499.00 Р
Рух на сході здійснюється наступним чином:
- Поворотна платформа опускається для комфортної їзди на сході.
- Після забігу задня платформа потрапляє в лінію з основною платформою. Таким чином, загальна довжина відстеженої бази забезпечує хороший зчеплення і безпеку від муфти.
- На виході з сходів задня платформа знижує вниз, щоб запобігти різкому падіння.
 , м. Київ
, м. КиївЩоб перевірити ідею, ми створили прототип. Контрольні електронні пристрої вирішили ще не проявлятися, але використовувати 2 віддалені від інших електричних колісних крісел (вчитель яких контролює 2 двигуни). Приводи крісельної та задньої платформи контролюлися за допомогою трьохположених вимикачів.
Виробництво вантажівок – окрема історія. Основою домашньої доріжки є ремені від Impresa. Стрічки зшиваються разом. Відрізки клинових стрічок вирізати і пришити гвинтами.

Зробки були використані колективні ферми, оскільки все було фінансовано з власної кишені. Вартість виготовлення 4 таких доріжок за кресленнями (навіть в Китаї) починається від 70 тис. рублів. (в тому числі виготовлення приладів). У результаті досить саморобні доріжки для колісного крісла, щоб піднятися на сходи без пасажира. З корисного навантаження трек зламав на місці з'єднання.
Створення першого прототипу приймала близько 80 тис. рублів, в тому числі оренда гаражного цеху.
Згідно з результатами тесту, це стало ясно:
- На трасі з гачками грунту можна піднятися сходи. Навіть якщо кроки різні розміри і стругані.
- Ідея повороту задньої платформи.
- Схема шків-колеса зводиться до збою.
Електричний колясник – трансформатор.
У цій задачі було кілька рішень:
- Зробіть редуктор з перемикачем швидкості. Точно, 4 коробки передач або принаймні 2 (лівий і правий).
- Відстеження і колеса обертаються з різних дисків.
- Відокремити колісну базу і відстежити підставу. У той же час колеса і доріжки будуть керуватися одним приводом з зменшенням доріжок.
92310р.
На рівну поверхню гусениці (низ і задньої) знаходяться в крайньому верхньому положенні і не заважають руху колісного крісла в цілому. Якщо необхідно долати перешкоду, нижню і задню платформу опускаються, а на трасах стоїть коляска. В результаті механічна передача від моторного валу до кермового шківа доріжки і різниці діаметрів коліс і шківа, можна було досягнути конструкції, що заглиблюється в швидкості і моментах.
Реалізація ідеї в прасці
Цього разу вони підходили до виробництва прототипу більш ретельно: вони замовили необхідні треки, диски та придбані електронні пристрої в Китаї. На підприємствах Новосибірська замовлена механічна обробка, лазерне різання та гнучкість. Збір і зварювання, звичайно, виконували себе. Усі роботи в класичному стартапі проводилися в майстерні гаража.
Система керування складається з пульта дистанційного керування та виконавчого модуля, який спілкується з синотом. Бездротовий пульт особливо необхідний у випадку, коли відключена людина не може контролювати себе джойстик, а інвалідний візок регулюється супроводжуваною особою. Під час сходження сходів, супроводжуюча людина не повинна доходити до ручної ручки для джойстику, що веде дистанційну руку, він візуально контролює рух.
Автоматична система підтримки горизонтальності крісла на основі акселерометра. Оскільки система не відрізняється високою динамічністю, можна обійтися без гіроскопа і зменшити математичні розрахунки. На нижніх і задніх платформах є датчики зворотного зв'язку. Інформація про позицію платформ передається на пульт дистанційного керування. Система працює від 24V гелійових батарей (на наступних версіях ми використовуємо літій-іон).
Тести були проведені на кроках багатоповерхових будинків:
Проблемні проблеми вирішуються ще досить. Але одне, напевно, це працює! Патентне застосування було подано для розробки колісно-трекерної системи з нащадними платформами. Наші подальші дії спрямовані на поліпшення електроніки, збільшення моменту на доріжках, зміну профілю доріжки для кращого залучення та, звичайно, створення презентабельного зовнішнього вигляду виробу.
На тему значення цього розвитку ми зробили відео:
Тепер ми можемо надати відключений свободу руху. Сходи будинку, магазину, кіно, пара рейсів сходів на шляху до друга або подруга здаються їм нічого.
Джерело: habrahabr.ru/post/222645/






















Тестування версії домашньої роботи 0.3.1
Виділені сервери під водою, буквально!? Перспективи вирощування риб в серверах?