2871
Inteligente en silla de transformador
Hola Habr!
Quiero decirle a usted acerca de nuestro proyecto de construcción de una silla de ruedas eléctrica a través del país. En un sentido técnico, esto no es sólo un cochecito, un robot real, incluso diría - un robot-transformador.

¿Qué le debo este cochecito?
Quiero decirle a usted acerca de nuestro proyecto de construcción de una silla de ruedas eléctrica a través del país. En un sentido técnico, esto no es sólo un cochecito, un robot real, incluso diría - un robot-transformador.

¿Qué le debo este cochecito?
- La mayoría de personas con discapacidad no pueden tener múltiples elektrokolyasok, por lo que debe ser lo más universal. Para ella era posible moverse por la casa y en la calle y en los bosques, y por lo que era posible subir de forma independiente y escaleras para subir a la acera. De aquí se sigue, y el segundo párrafo.
- La anchura de la silla de paseo no es más de 650 mm, que podría en cualquier entrada y un ascensor para bajar. La longitud de no más de 1100 mm.
- Seguro.
- barato. Creo que no hay ningún comentario.
- Eficiencia Energética, como las baterías son caras.
El principal problema que requiere enfoques estructurales drásticos - es, por supuesto, subir escaleras. Se consideró un gran número de realizaciones, que van desde las ruedas de gran diámetro convencionales con profunda banda de rodadura y el acabado de la rueda-transformador se convierte en un dispositivo de paso a paso. Por todas partes había los problemas: algunas soluciones no eran seguras, algunas opciones sólo son adecuados para un tipo de escaleras (altura y la profundidad de un cierto grado), etc. La mejor opción resultó motor oruga.
Nuestra primera idea genial, condenada al fracaso
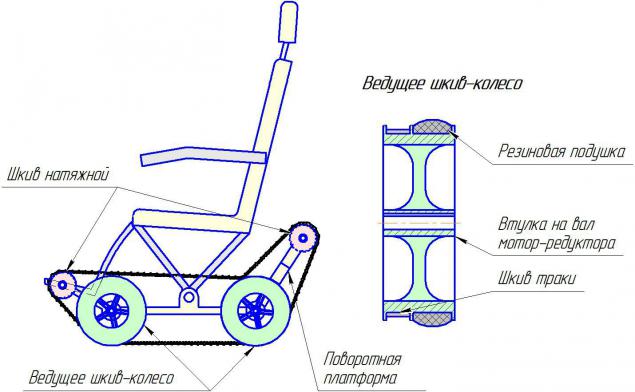
La idea era la siguiente: 4 motorreductor (AWD), silla giratoria, plataforma trasera giratoria y la polea en las 4 ruedas con pistas tensas. Los chips roldanas que en una superficie plana no toca el suelo del camión y por lo tanto no crean vibraciones y la fricción adicional. Paseos en carruajes antiguos sobre almohadillas de goma-poleas. Y al acercarse a un obstáculo, tal como un camión escalera para comprometerse con este mismo obstáculo.
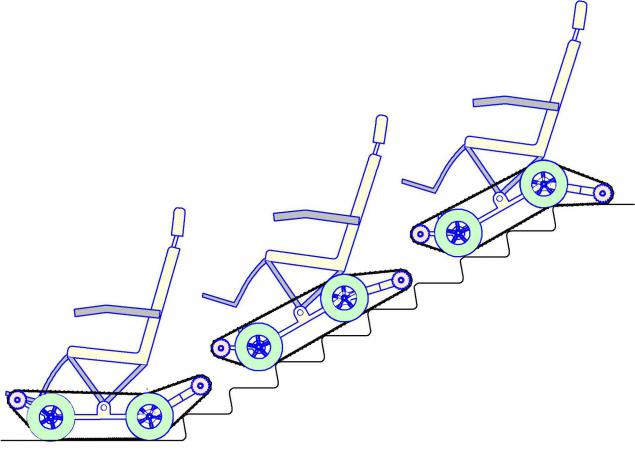
Movimiento de las escaleras de la siguiente manera:
- Turntable rebajado para facilitar la llegada a las escaleras.
- Después de la llegada, la plataforma trasera está en consonancia con la plataforma principal. Por lo tanto, la longitud total de la base de la pista ofrece un buen agarre y la seguridad de los golpistas.
- Cuando el Congreso con plataforma trasera escalera se baja para evitar una fuerte caída. Mientras levanta la silla gira automáticamente, manteniendo la posición horizontal. Caminando por las escaleras se lleva a cabo exactamente de la misma manera, pero en orden inverso.
La creación del primer prototipo h5> Para probar la idea, que se dedicó a la creación de un prototipo. Electrónica de control han decidido no inventar y usar 2 a distancia desde otra elektrokolyasok (cada una de las cuales controla un motor de 2-E). Conduce y plataforma asiento trasero se controla a través de interruptor de palanca de tres posiciones.
Hacer camión - es una historia totalmente diferente. Bases de camión hecho en casa - es el tiempo cinturones del Impreza. Correas cosidas juntas. A medida que se cortan y se cosen tornillos cinturón segmentos del estirón.

Técnicas utilizadas koljós, como las finanzas de todo de su bolsillo. El costo de producción de 4 vías en estos dibujos (incluso en China) comienza a partir de 70 º. Rub. (Incluyendo la fabricación de equipos). Como resultado de la pista improvisada suficiente para cochecito por las escaleras sin un pasajero. Desde camión carga útil se rompió en la conexión.
En la creación del primer prototipo tomó cerca de 80 mil. Rub., Incluyendo taller alquiler garaje.
Según los resultados de la prueba se hizo evidente:
- En la pista con listones pueden subir escaleras. Incluso si el nivel de diferentes tamaños y troceados.
- La idea con las obras de plataforma traseras giratorias.
- El esquema con una polea ruedas condenado al fracaso. El principal problema es que para subir escaleras y conducir sobre una superficie plana necesita unos fundamentalmente diferentes velocidades y tiempos difieren en alrededor de 10 veces. Por supuesto, es posible instalar más actuadores de potencia, mientras que el movimiento de la carga del motor de avión será significativamente menor que la nominal, y ascendiendo escaleras debajo de la tensión nominal (para disminuir la velocidad). En este escenario, sobre la eficiencia energética y de bajo costo puede ser olvidado.
Utilice una eléctrica - transformador
. Había varias soluciones a este problema:
- Haga una caja de cambios con cambio de marchas. Específicamente, el engranaje 4, o al menos 2 (en los lados izquierdo y derecho).
- pista y las ruedas giran en diferentes unidades.
- Divide ruedas y seguimiento de base. En esta rueda de camión y será impulsado por una única unidad con una reducción en la pista. Después de un análisis de abundante y los cálculos revelaron que la última opción es la más económica y técnicamente viable.
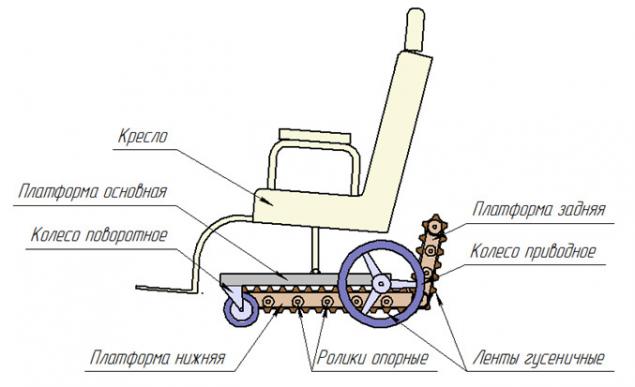
Sobre una base de oruga superficie plana (parte inferior y la parte posterior) están en la posición más alta y no obstaculizar el movimiento del carro. Si los obstáculos y la plataforma inferior trasera necesarias, la superación se baja, y el carro se encuentra en la oruga. Como resultado, debido a la transmisión mecánica del eje del motor a las ruedas de polea de accionamiento y camiones y la diferencia de diámetro de la polea de diseño logrado una diferencia de diez veces en la velocidad y el par de torsión.
La aplicación de las ideas en
hierro Esta vez a la fabricación del prototipo llegó de manera más profunda: ordenados en China data camiones, compraron electrónica de accionamiento. Mecanizado, corte por láser y doblado reservar en las empresas de Novosibirsk. Montaje y soldadura, por supuesto, llevarse a cabo a sí mismos. Todas las obras como un inicio clásico se llevó a cabo en un taller de garaje.
El sistema de control consiste en una unidad de control y un ejecutivo que se comunican por bluetooth. Control remoto inalámbrico es especialmente necesario en el caso de que una persona con discapacidad no puede controlar a sí mismo los controles de palanca universal y sidecar acompañante. Al subir las escaleras hasta el mantenedor no tiene que llegar para el brazo de la silla de la palanca de mando, manteniendo el control remoto en la mano, que controla el movimiento visual.
Sistema automático para mantener la horizontalidad asientos basado en el acelerómetro. Dado que el sistema no es muy dinámico, es posible hacerlo sin el giroscopio y reducir matemáticas. En el mecanismo de bajada y elevación inferior y plataformas traseras tienen sensores de retroalimentación. La información de posición se transmite a las plataformas remotas. Sistema de energía es proporcionada por baterías de gel de 24 (en la próxima versión utilizará de iones de litio).
Las pruebas se llevaron a cabo en las escalinatas de pisos:
Problemas a resolver, siendo suficiente. Pero una cosa es segura - que funciona! En el desarrollo del sistema de rueda-carril con patente pendiente de plataformas móviles. Además, nuestras acciones están dirigidas a la finalización de la electrónica, el aumento de par de torsión en las pistas, cambiando el perfil de pistas para participar mejor y, por supuesto, crear un aspecto presentable del producto.
Sobre la importancia de este desarrollo, hemos eliminado el video:
Ahora podemos dar la libertad de movimiento de una persona con discapacidad. Casas Escaleras, tiendas, un cine, un par de tramos de escaleras en el camino a un amigo o novia se parecen a ellos trivia suschimi.
Fuente: habrahabr.ru/post/222645/


























Versión robot hogar Prueba 0.3.1
Servidores bajo el agua Dedicado, literalmente!? Las perspectivas para la cría de peces en los servidores?!