Жизнь — интересная!
Подписывайтесь на нашу группу в Telegram и Facebook, чтобы быть в сообществе единомышленников, находить вдохновение и не пропускать свежие и удивительные статьи с bashny.net.
637
0.2
2016-07-28
Робот SAW ползает, карабкается и плавает всего с одним двигателем
Если нужно движение, то аппарат может прибегать к колёсам и гусеницам, шагать или уходить в экзотику уровня ползания и плавания. Способов заставить робота двигаться описано много. Иногда даже может показаться, что ничего нового уже не придумать. Но это далеко не так. В недавно опубликованной работе Давид Заррук из Университета имени Бен-Гуриона в Негеве описывает волноподобного робота-червя, который приводится в действие всего одним исполнительным устройством.
Робот так и называется: single actuator wave-like robot или SAW. Его волноподобная структура толкает его вперёд или назад. Для поворотов нужны колёса руления. Подобная конструкция не только хорошо двигается по суше, но и может забираться в узких щелях и плавать в воде.
Исследователи говорят, что принципы ползания позаимствованы у змей. Хотя ход робота SAW можно сравнить с методами движения червя, аналогия условна. Тело земляного червя удлиняется в одной части за счёт утоньшения. Передний конец продвигается вперёд, за ним поспевает задняя часть, которая сокращается. Процесс повторяется. SAW же идёт синусоидой по поверхности. Принципы движения робота схожи с тем, что используют некоторые мелкие морские животные в куда меньших масштабах: микроскопические организмы плавают с помощью жгутика.
Видеодемонстрация робота.
Минимализм, простота движений и высокая производительность — это то, над чем Заррук давно работает. В интервью журналу IEEE Spectrum Заррук рассказал, что ещё в 2004 году он, будучи студентом, попытался воссоздать волновое движение подобное тому, что есть в живых организмах. Во время работы над докторской Заррук пришёл к идее использования волнового движения для систем внутри пищеварительной системы. Простую систему с одним мотором можно уменьшить и использовать для передвижения внутри кишечника.
Пару лет назад Заррук читал курс проектирования изделий и рассказывал о пружинах. Тогда он обратил внимание, что в одной проекции пружина — круг, в другой — синусоида. Если пружина вращается, то волна незамысловато двигается. Заррук ставил во главу угла простоту, поэтому заинтересовался.
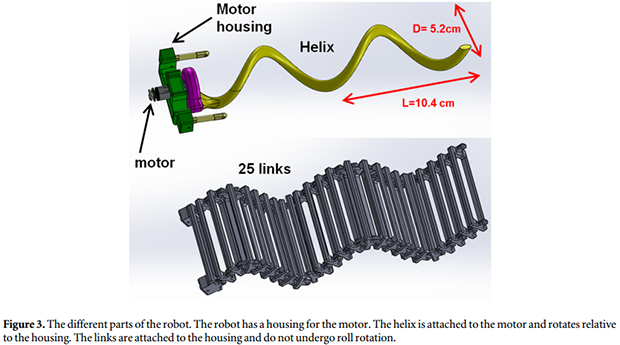
Верхний рисунок: двигатель вращает спираль относительно корпуса. Нижний рисунок: 25 звеньев опоясывают спираль, они присоединены к корпусу и не вращаются.
В SAW один двигатель. Он вращает хребет робота — жёсткую спираль. Последняя окружена серией звеньев, распечатанных на 3D-принтере. Эти звенья подвижны в одной плоскости, словно части велосипедной цепи. Спираль вращается, а звенья ходят вверх-вниз. При этом звенья двигаются так, что при контакте с поверхностью толкают робота вперёд.

Волна идёт справа налево, а звенья в контакте с землёй немного двигаются влево и вращаются по часовой стрелке.
Робот SAW может двигаться только вперёд или назад. Для заднего хода достаточно крутить спираль в обратном направлении. Рулить ему помогают два колеса на корпусе, которые в остальном пассивны: они не приводят аппарат в действие. Может показаться, что единственный способ ускорить движение — вращать спираль быстрее. Но исследователи добавили на звенья зубцы, которые позволяют делать движения семи волн за шесть циклов. Так скорость возросла на 13 %.

Специальные зубцы не мешают звеньям двигаться друг относительно друга.
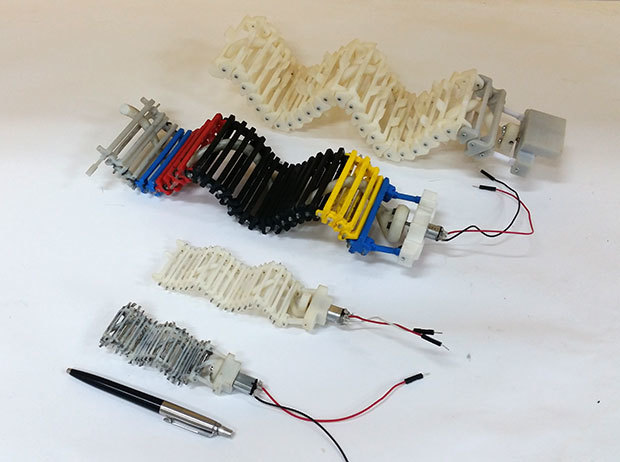
Было изготовлено несколько моделей разного размера. Самая крупная (разноцветная) развивает скорость в 5,6 волн в секунду или 57 сантиметров в секунду. Она может карабкаться вверх между двух узко поставленных поверхностей на скорости в 8 см/с. Заключённая в водонепроницаемый корпус модель плавает на скорости в 6 см/с. SAW работает не только на ровном полу лаборатории, он преодолевает складки местности и проходит камни и траву.
SAW — не просто игрушка. Сейчас его удалось уменьшить до размеров ручки (самый нижний образец на фотографии выше). В перспективе робота можно миниатюризировать до такой степени, что он будет в состоянии снимать кишечник человека и брать образцы для биопсии. Работы над дальнейшим уменьшением уже ведутся.
Как утверждает Заррук, робот почти не требует обслуживания, что необычно для динамической структуры, полученной 3D-печатью. В будущем систему руления изменят — текущая не слишком элегантна. Исследователи хотят попробовать сочленить двух роботов SAW через шарнир. А если получится на лету изменять частоту волн и их амплитуду, то робот сможет лучше адаптироваться к разным поверхностям, извиваться через трубы многих диаметров и оптимизировать движение для каждой из жидкостей.
Single actuator wave-like robot (SAW): design, modeling, and experiments
Источник: geektimes.ru/post/278924/
Портал БАШНЯ. Копирование, Перепечатка возможна при указании активной ссылки на данную страницу.