640
SAW机器人抓取,爬升和只有一个引擎游
 搜索结果如果要移动机器可能诉诸车轮和轨道,行走或进入爬行和游泳异国情调的水平。方法,使许多人描述的机器人运动。有时候好像没有什么新的了上来。但它并非如此。在从Zarrouk戴维·本 - 古里安内盖夫大学的最近的一篇文章描述了波浪状的机器人蠕虫,它仅由一个执行器驱动。搜索结果
该机器人被称为:单驱动器波浪状的机器人或SAW。其波浪状结构被向前或向后推它。转动方向盘的需要。这样的设计不仅在陆地上好的动作,但可以爬进狭窄的缝隙和在水中游。搜索结果
研究人员说,从爬行的蛇借来的原则。虽然进展表面波机器人可以与蜗杆的运动,类比条件的方法进行比较。蚯蚓的身体是一个部分拉长,由于变薄。前端前进,跟上后面的部分,也就是减少了他。该过程被重复。 SAW也一样在表面上的正弦波。类似于规模要小得多使用一些小的海洋动物机器人的运动原理:微观生物利用游泳鞭毛结果搜索结果视频演示机器人搜索结果..
极简主义,运动的简单性和高性能 - 这是在什么时间Zarrouk工作。符合IEEE频谱Zarrouk接受采访时表示,早在2004年,他还是个学生,试图重新类似于存在于生物体的波动。而在他的博士工作Zarrouk来使用波动消化系统内的系统的想法。一个简单的系统,一个电机可以减少肠道内使用的运动。搜索结果
几年前Zarrouk阅读产品设计课程,并谈到了春天。然后,他注意到在一个投影春天 - 圈,另 - 正弦波。如果弹簧被转动时,波移动不复杂。 Zarrouk放容易,所以感兴趣的搜索结果
搜索结果如果要移动机器可能诉诸车轮和轨道,行走或进入爬行和游泳异国情调的水平。方法,使许多人描述的机器人运动。有时候好像没有什么新的了上来。但它并非如此。在从Zarrouk戴维·本 - 古里安内盖夫大学的最近的一篇文章描述了波浪状的机器人蠕虫,它仅由一个执行器驱动。搜索结果
该机器人被称为:单驱动器波浪状的机器人或SAW。其波浪状结构被向前或向后推它。转动方向盘的需要。这样的设计不仅在陆地上好的动作,但可以爬进狭窄的缝隙和在水中游。搜索结果
研究人员说,从爬行的蛇借来的原则。虽然进展表面波机器人可以与蜗杆的运动,类比条件的方法进行比较。蚯蚓的身体是一个部分拉长,由于变薄。前端前进,跟上后面的部分,也就是减少了他。该过程被重复。 SAW也一样在表面上的正弦波。类似于规模要小得多使用一些小的海洋动物机器人的运动原理:微观生物利用游泳鞭毛结果搜索结果视频演示机器人搜索结果..
极简主义,运动的简单性和高性能 - 这是在什么时间Zarrouk工作。符合IEEE频谱Zarrouk接受采访时表示,早在2004年,他还是个学生,试图重新类似于存在于生物体的波动。而在他的博士工作Zarrouk来使用波动消化系统内的系统的想法。一个简单的系统,一个电机可以减少肠道内使用的运动。搜索结果
几年前Zarrouk阅读产品设计课程,并谈到了春天。然后,他注意到在一个投影春天 - 圈,另 - 正弦波。如果弹簧被转动时,波移动不复杂。 Zarrouk放容易,所以感兴趣的搜索结果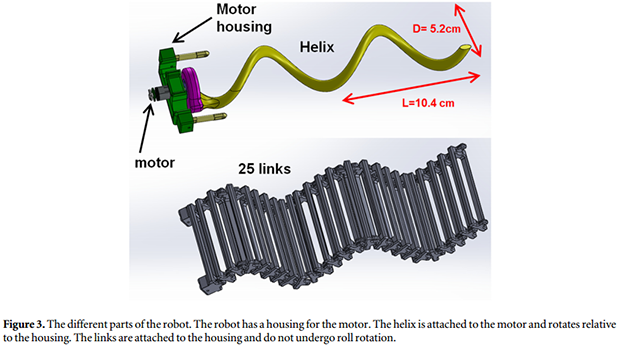 搜索搜索结果上如图:电机旋转相对于壳体螺旋前列。下图:25单位包围螺旋,它们连接到主体和不旋转搜索结果。
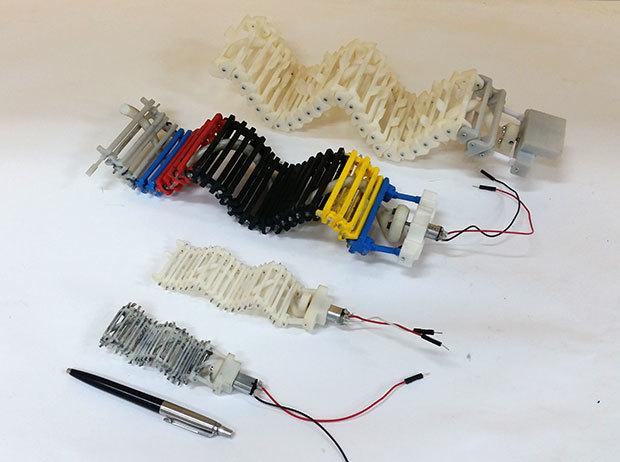
该SAW一个引擎。他转动机器人里奇 - 刚性螺旋。后者是由一系列的已打印的三维打印机链接包围。这些单元是在同一平面上移动,就好象一个自行车链的一部分。螺旋圈,为链接上上下下。此链接被移动,使得当在与机器人的表面接触被推向前。搜索结果,
搜索搜索结果上如图:电机旋转相对于壳体螺旋前列。下图:25单位包围螺旋,它们连接到主体和不旋转搜索结果。
该SAW一个引擎。他转动机器人里奇 - 刚性螺旋。后者是由一系列的已打印的三维打印机链接包围。这些单元是在同一平面上移动,就好象一个自行车链的一部分。螺旋圈,为链接上上下下。此链接被移动,使得当在与机器人的表面接触被推向前。搜索结果,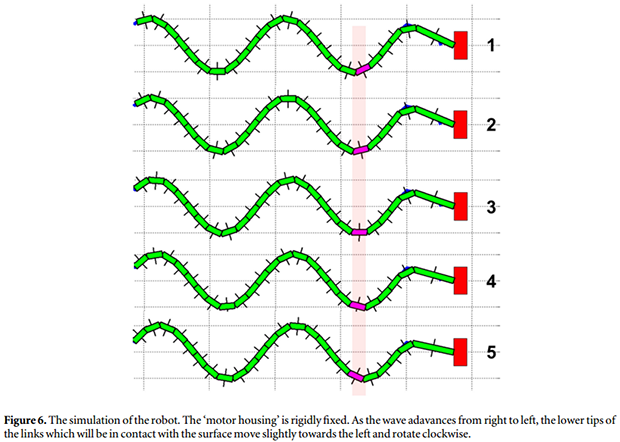 结果,搜索结果,波由右至左,和连结变为与地面接触一点移动到左和顺时针旋转。搜索结果
SAW机器人只能前进或后退。为了扭转在相反的方向相当陡峭的螺旋。它有助于引导身体上的两个车轮,否则是被动它们不会导致机器操作。这似乎是唯一的办法,以加快移动 - 旋转的螺旋更快。但研究人员加入到牙齿的链接,让你得七波的运动六个周期。因此,速度增加了13%。搜索结果
结果,搜索结果,波由右至左,和连结变为与地面接触一点移动到左和顺时针旋转。搜索结果
SAW机器人只能前进或后退。为了扭转在相反的方向相当陡峭的螺旋。它有助于引导身体上的两个车轮,否则是被动它们不会导致机器操作。这似乎是唯一的办法,以加快移动 - 旋转的螺旋更快。但研究人员加入到牙齿的链接,让你得七波的运动六个周期。因此,速度增加了13%。搜索结果 搜索结果数据库特牙齿不阻止链接到彼此相对运动。搜索结果
几个模型构建各种尺寸的。最大的(彩色)加速每秒5,6浪或每秒57厘米。它可以在两个窄面间在8厘米/秒的速度爬设置。在防水壳体包围以6厘米/秒的速度漂浮模型。 SAW仅在一个平坦的地板实验室工作的不是,他克服了地形和通过岩石和草地。搜索结果
搜索结果数据库特牙齿不阻止链接到彼此相对运动。搜索结果
几个模型构建各种尺寸的。最大的(彩色)加速每秒5,6浪或每秒57厘米。它可以在两个窄面间在8厘米/秒的速度爬设置。在防水壳体包围以6厘米/秒的速度漂浮模型。 SAW仅在一个平坦的地板实验室工作的不是,他克服了地形和通过岩石和草地。搜索结果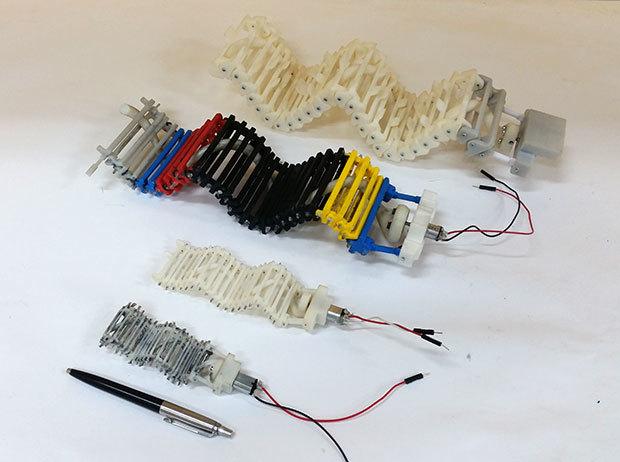
中国 SAW - 不只是一个玩具。现在它可以减少到所述手柄(最低样品在上面的照片)的大小。术语机器人可以小型化到这样的程度,他将能够去除人体肠道和取样活检。关于进一步减排工作已经展开。搜索结果 由于Zarrouk说,机器人几乎是免维护的,这是不寻常的三维印刷获得一个动态结构。在未来,转向系统的改变 - 目前是不是太优雅。研究人员想尝试阐明两个机器人通过铰链锯。并且如果获得对飞改变波和振幅的频率,机器人将能更好地通过管子的直径和许多优化流量为每个搜索结果,单个致动器波浪状机器人(SAW)的液体的适应不同的表面,蠕动.:设计,建模和实验搜索结果 来源:geektimes.ru/post/278924/























