Жизнь — интересная!
Подписывайтесь на нашу группу в Telegram и Facebook, чтобы быть в сообществе единомышленников, находить вдохновение и не пропускать свежие и удивительные статьи с bashny.net.
850
0.2
2015-11-18
Коптер в рюкзаке — сборка по мотивам рамы Predator 650
Сегодняшний пост подготовил молодой коптеровод-конструктор по имени Денис. Он собирает компактный коптер с онлайн-трансляцией (FPV). Передаем слово ему:
Честно признаюсь, я с детства мечтал делать фотографии «с высоты птичьего полета». И когда DJI начали пиарить первый фантом, понял, что время пришло. Запускать планировал беззеркалку, поэтому и коптер искал соответствующий. В то время готовые решения с необходимой грузоподъемностью стоили от 3000$. Более того, они не складывались. А компактность была для меня основным параметром, так как наивно хотелось носить коптер в рюкзаке. Поэтому я решил собрать дрон самостоятельно.

Начитавшись форумов и думая, что достаточно знаю о квадрокоптерах, заказал себе кучу деталей, в том числе вот такую раму (HobbykingPredator 650):
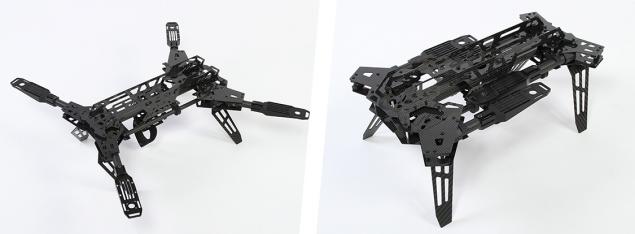
Выбранная рама казалась удачным решением до тех пор, пока я не взял её в руки. В процессе сборки было найдено несколько недостатков и не совсем понятных конструкторских решений.

Во-первых, различные диаметры несущей трубы и «лап» (трубок под моторы) приводят к чрезмерному нагромождению углеродных пластин, а вертикальные пластины расположены близко друг к другу и мешают размещать электронику.
Во-вторых, рама не особо поддается доработке. Лапы не удлинить, иначе перестанут складываться; крепления моторов не подойдут для спаренных моторов (пришлось докупать другие); родные ноги (шасси) слишком короткие и хлипкие, под нагрузкой разъезжаются.
В первый полет дрон отправился с минимальными изменениями: спаренные крепления моторов, губки для мытья посуды на ногах. Камера была привинчена прямо к раме. Несмотря на то, что это был мой первый опыт, коптер управлялся легко, хоть и реагировал с задержкой. Казалось, ещё чуть-чуть, и сборка будет закончена. Но не тут-то было. До сих пор появляются новые идеи, и модернизация продолжается.

К шасси очень удачно подошли поплавки для аквааэробики (где-то здесь я уже простился с мыслью о компактности). Камера поначалу крепилась на самодельный подвес «два дуршлага». Немного насилия, и рама согласилась складываться с 15ти дюймовыми пропеллерами. Шасси заменил на «крабы». Наивно планировал снимать пластиковые дуги при транспортировке, однако, трубки не выдерживали большого количества «защелкиваний».

И вот наконец-то состоялся исторический момент подключения спуска камеры к пульту. В первый же погожий день отнес агрегат на руках на ближайшую поляну. GPS не видит спутники? Ну и ладно, взлетаем! FPV у меня не было, фотографировал вслепую, но главное, что фотографировал! И тут коптер практически перестает слушаться регулировки газа. Точнее, отказывается зависать: либо резко вверх, либо вниз. В итоге, пикирует метров с десяти… Шасси в хлам, коробка из под мармеладок чудом спасла камеру. Причину такого поведения дрона я так пока и не выяснил.
В тот момент потраченный бюджет стал единственной причиной продолжать. Настало время подумать над ошибками:
Во-первых, не стоило вешать камеру на сырую сборку.
Во-вторых, следовало начать с маленькой и простой модели. Те же шишки можно было набить с меньшими затратами.
Также пришло понимание, что для компактности шасси должно быть съемным. У китайцев ничего подобного не нашлось. Просмотрев большинство известных интернет-магазинов и, думая, что теперь-то я достаточно знаю о квадрокоптерах, решил собрать свою раму.
Требования к ней были сформулированы так:
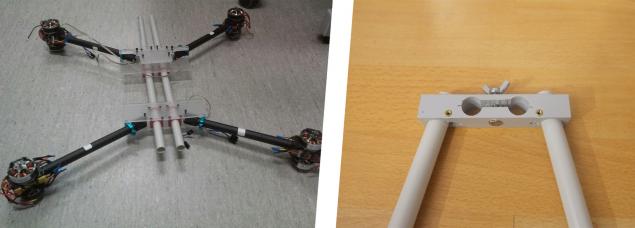
Для ног взял брусок ПВХ и рассверлил под трубки 16 мм. На болт посередине можно крепить подвес для камеры. С этой рамой у нас всё сложилось хорошо: 340x200x200 против 400x300x300 у Predator 650 с «крабами». Выглядит пока неопрятно, но собирается за 3 минуты.

За 2 года на детали ушло около 1500$. Нынешняя сборка ~ 1055.81$, к этому нужно добавить хороший подвес (200$) зарядник (100$) и мелочи вроде запасных пропеллеров.
Ниже приведен список основных деталей и их стоимость:
В процессе разработки рамы заметил, что такая конструкция подходит для различных размеров коптера (элементы рамы можно очень просто передвигать по несущим трубкам). Получается примерно от 450 до 1000 мм, что соответствует пропеллерам от 8 до 18 дюймов. Поэтому появилась идея разработать универсальный набор деталей для дронов, по аналогии с Лего. Такой конструктор позволил бы легко модифицировать и чинить раму коптера, которая при этом умела компактно складываться.
Готов подробнее расписать идею в следующей статье. Сейчас как раз модернизирую раму и могу всё последовательно фотографировать.
p.s. Спасибо Денису Крылову за этот материал и опыт.
На этом всё, с вами был простой сервис для выбора сложной техники Dronk.Ru
Не забывайте подписываться на наш блог, будет ещё много интересного.
Источник: geektimes.ru/company/dronk/blog/265920/
Честно признаюсь, я с детства мечтал делать фотографии «с высоты птичьего полета». И когда DJI начали пиарить первый фантом, понял, что время пришло. Запускать планировал беззеркалку, поэтому и коптер искал соответствующий. В то время готовые решения с необходимой грузоподъемностью стоили от 3000$. Более того, они не складывались. А компактность была для меня основным параметром, так как наивно хотелось носить коптер в рюкзаке. Поэтому я решил собрать дрон самостоятельно.

Начитавшись форумов и думая, что достаточно знаю о квадрокоптерах, заказал себе кучу деталей, в том числе вот такую раму (HobbykingPredator 650):

Выбранная рама казалась удачным решением до тех пор, пока я не взял её в руки. В процессе сборки было найдено несколько недостатков и не совсем понятных конструкторских решений.

Во-первых, различные диаметры несущей трубы и «лап» (трубок под моторы) приводят к чрезмерному нагромождению углеродных пластин, а вертикальные пластины расположены близко друг к другу и мешают размещать электронику.
Во-вторых, рама не особо поддается доработке. Лапы не удлинить, иначе перестанут складываться; крепления моторов не подойдут для спаренных моторов (пришлось докупать другие); родные ноги (шасси) слишком короткие и хлипкие, под нагрузкой разъезжаются.
В первый полет дрон отправился с минимальными изменениями: спаренные крепления моторов, губки для мытья посуды на ногах. Камера была привинчена прямо к раме. Несмотря на то, что это был мой первый опыт, коптер управлялся легко, хоть и реагировал с задержкой. Казалось, ещё чуть-чуть, и сборка будет закончена. Но не тут-то было. До сих пор появляются новые идеи, и модернизация продолжается.

К шасси очень удачно подошли поплавки для аквааэробики (где-то здесь я уже простился с мыслью о компактности). Камера поначалу крепилась на самодельный подвес «два дуршлага». Немного насилия, и рама согласилась складываться с 15ти дюймовыми пропеллерами. Шасси заменил на «крабы». Наивно планировал снимать пластиковые дуги при транспортировке, однако, трубки не выдерживали большого количества «защелкиваний».

И вот наконец-то состоялся исторический момент подключения спуска камеры к пульту. В первый же погожий день отнес агрегат на руках на ближайшую поляну. GPS не видит спутники? Ну и ладно, взлетаем! FPV у меня не было, фотографировал вслепую, но главное, что фотографировал! И тут коптер практически перестает слушаться регулировки газа. Точнее, отказывается зависать: либо резко вверх, либо вниз. В итоге, пикирует метров с десяти… Шасси в хлам, коробка из под мармеладок чудом спасла камеру. Причину такого поведения дрона я так пока и не выяснил.
В тот момент потраченный бюджет стал единственной причиной продолжать. Настало время подумать над ошибками:
Во-первых, не стоило вешать камеру на сырую сборку.
Во-вторых, следовало начать с маленькой и простой модели. Те же шишки можно было набить с меньшими затратами.
Также пришло понимание, что для компактности шасси должно быть съемным. У китайцев ничего подобного не нашлось. Просмотрев большинство известных интернет-магазинов и, думая, что теперь-то я достаточно знаю о квадрокоптерах, решил собрать свою раму.
Требования к ней были сформулированы так:
- Лапы должны складываться максимально компактно
- Шасси должно быть съемным

Для ног взял брусок ПВХ и рассверлил под трубки 16 мм. На болт посередине можно крепить подвес для камеры. С этой рамой у нас всё сложилось хорошо: 340x200x200 против 400x300x300 у Predator 650 с «крабами». Выглядит пока неопрятно, но собирается за 3 минуты.

За 2 года на детали ушло около 1500$. Нынешняя сборка ~ 1055.81$, к этому нужно добавить хороший подвес (200$) зарядник (100$) и мелочи вроде запасных пропеллеров.
Ниже приведен список основных деталей и их стоимость:
- HobbyKing® Predator 650 (101.10$).
- 8 x ARRIS 3508 380KV (2 запасные) — моторы неплохие, хотя мне не с чем сравнивать (376.20$).
- 9 х Afro ESC 12Amp OPTO — нареканий нет, у меня токи до 6-8 А (101.52$).
- HKPilot32 Autonomous Vehicle — клон Pixhawk, нареканий нет (120.89$).
- Ublox Neo-M8N GPS with Compass (45.39$).
- HobbyKing B6 50W Charger — категорически не рекомендую, убивает батарейки. Нормальный ниже.
- AK610AC Touch Screen Multi Funtion — разумный минимум (109.95$).
- Turnigy 5X 5Ch Mini Transmitter — маленький простой пульт (30$).
- ZIPPY Compact 5000mAh 4S 25C (39.01$).
- FPV Landing Gear (Крабы) — рассчитаны на массу до 2 кг (32.98$).
- 8 x Vibration Damping Ball 65g (1.17$).
- 8 x Tarot 1555 folding props set (63.32$).
- 4 x Dual Layer Motor Mount (34.28$).
В процессе разработки рамы заметил, что такая конструкция подходит для различных размеров коптера (элементы рамы можно очень просто передвигать по несущим трубкам). Получается примерно от 450 до 1000 мм, что соответствует пропеллерам от 8 до 18 дюймов. Поэтому появилась идея разработать универсальный набор деталей для дронов, по аналогии с Лего. Такой конструктор позволил бы легко модифицировать и чинить раму коптера, которая при этом умела компактно складываться.
Готов подробнее расписать идею в следующей статье. Сейчас как раз модернизирую раму и могу всё последовательно фотографировать.
p.s. Спасибо Денису Крылову за этот материал и опыт.
На этом всё, с вами был простой сервис для выбора сложной техники Dronk.Ru
Не забывайте подписываться на наш блог, будет ещё много интересного.
Источник: geektimes.ru/company/dronk/blog/265920/
Портал БАШНЯ. Копирование, Перепечатка возможна при указании активной ссылки на данную страницу.



































7 свитеров для айтишников
Физики Университета Вашингтона использовали лазер в качестве жидкостного охладителя