Жизнь — интересная!
Подписывайтесь на нашу группу в Telegram и Facebook, чтобы быть в сообществе единомышленников, находить вдохновение и не пропускать свежие и удивительные статьи с bashny.net.
1154
0.3
2015-03-13
Печатаем ушки на 3D принтере или наш Котэ против японской MiMi
Аниматроника — создание подвижных роботов, которые имитируют движения живых существ настоящих или вымышленных.
Чуть больше года назад мне показали концепт видео с «necomimi» – откровенно фриковский гаджет. Это кошачьи ушки, управляемые с помощью сигналов мозга считываемых с помощью двух нейросенсоров. Очень эмоциональная игрушка. Сначала хотелось купить её разобрать и собрать как-то по другому. Почему по другому? Я посмотрел в сети очень много видео про эти «мими» и понял, что во первых уши двигаются только в одной плоскости, что выглядит как-то скованно. Настоящие кошарики двигают ушами во всех степенях свободы. А во вторых вот эти нейросигналы с нейродатчиками какая-то сомнительная технология. Мелким девчонкам с трудом удавалось пошевелить ушками, как бы они не морщили свой лобик, пытаясь представить рожок мороженого. Одна даже плакала.
У нас всё будет по другому: уши будут свободно двигаться в двух плоскостях, а управлять ими будем простым нажатием кнопки на пульте. И для каждой кнопки придумаем и запрограммируем свой спецэффект. Короче. Соберем несложного робота-аниматроника, запрограммированного на движения, имитирующие движение кошачьих ушей.
Что нам понадобится?
1. Микроконтроллер Arduino Nano или MP1511 от МастерКит
2. Четыре сервомашинки. Микро или мини. На 180 градусов.
3. Пять кнопок и включатель
4. Источник питания в 5-6 В (четыре пальчиковые батарейки или ещё лучше повербанк для смартфона)
5. Немного проводов, паяльник
6. Нитка с иголкой
7. Два лоскута фетровой ткани разных цветов
8. Пару часов свободного времени
9. Но самое главное – доступ к 3D принтеру. На нем то и будем печатать каркас ушей и кинематику.
10. Свободный вечер ))
Файлы ушек, каркаса и ободка для крепления сервомашинок выложены в виде STL-файлов на нашем сайте на этой странице. Они адаптированы для печати на MC3. Но, впрочем, их можно печатать на любом 3D принтере. Корпус для контроллера и кнопок каждый может придумать сам.
Сборка кинематики
Когда все детали будут напечатаны, приступим к сборке. Комплект для каждого уха состоит из трех деталей: самого ушка и двух деталей для крепления сервомоторчиков.
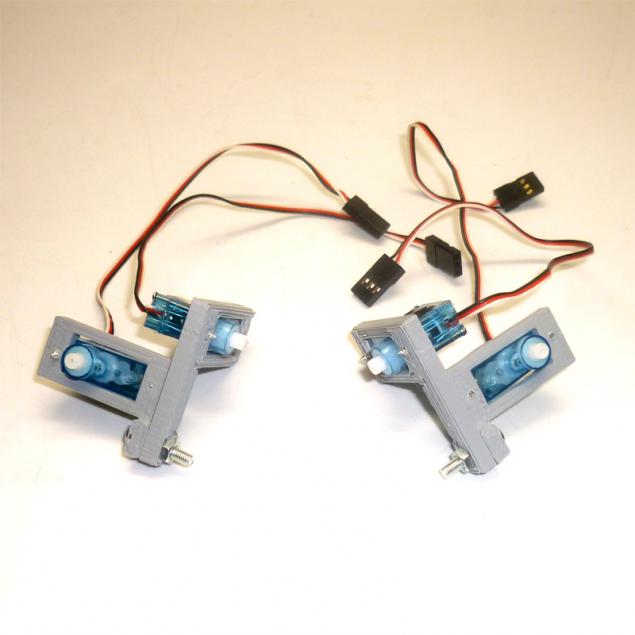
Скрепляем винтом с гайкой детали для сервомоторчиков как показано на рисунке. Должны получиться два симметричных каркаса:

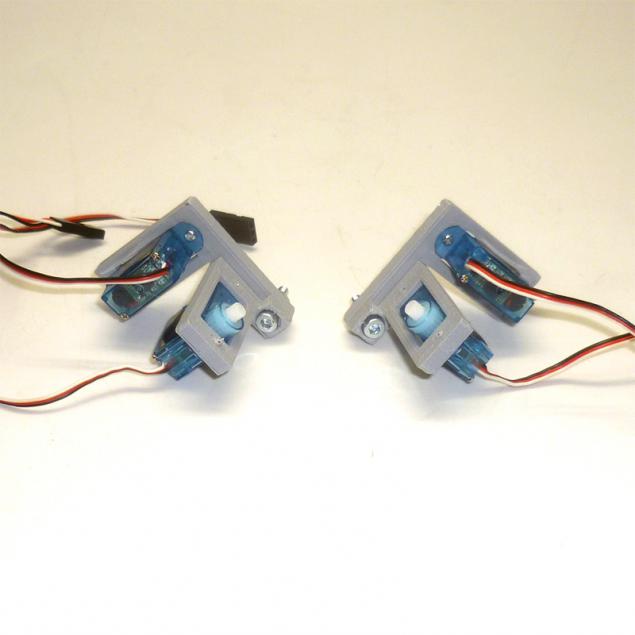
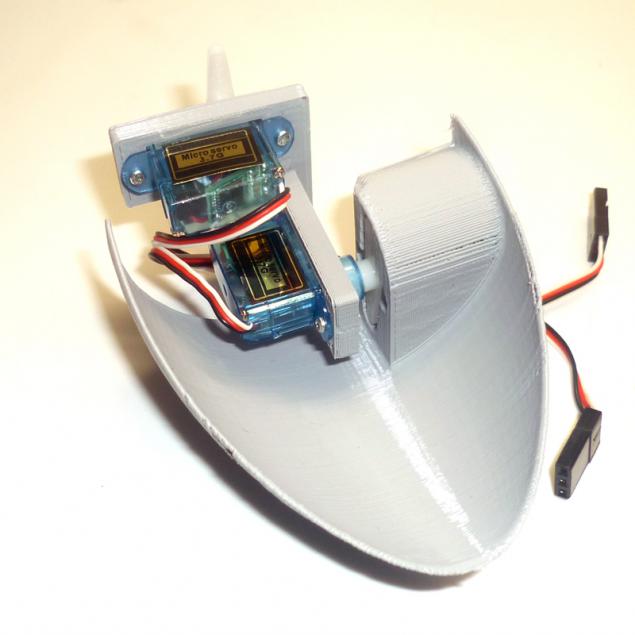
На сделанные ранее каркасы закрепите сервомашинки как показано на рисунках. Нужны три самореза – два больших и один маленький (сервомашинки идут всегда в комплекте с саморезами). Двумя большими саморезами прикручивается сама сервомашинка, а маленьким качалка к её оси.
Прикрепляем уши
В первую очередь необходимо отцентрировать оси. Ось сервомашинки может двигаться только на 180 градусов. Одеваем на ось длинную качалку, осторожно прокручивая ось, находим крайние точки, выводим ось на середину, вытаскиваем качалку и вновь устанавливаем её перпендикулярно корпусу сервомашинки. Вторую сервомашинку которая будет крепится на ободок центрируем точно также.
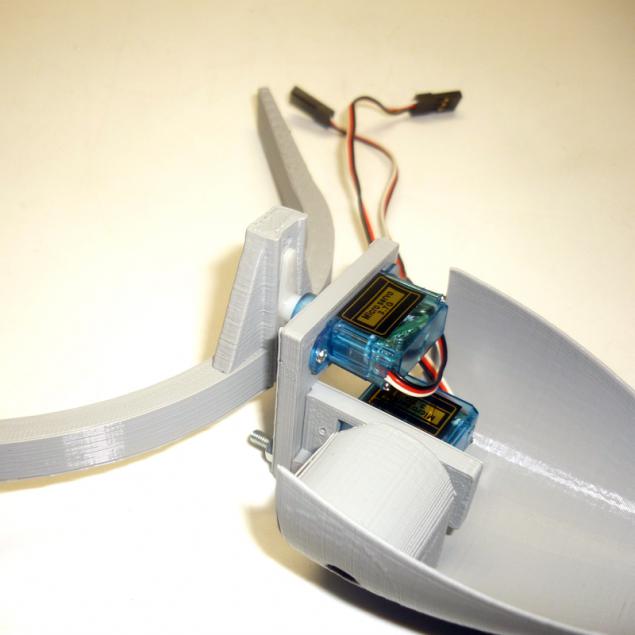
Далее через отверстие в платформе для крепления сервомашинки маленьким саморезом закрепляем машинку на ухе. Внимательно смотрим рисунки:
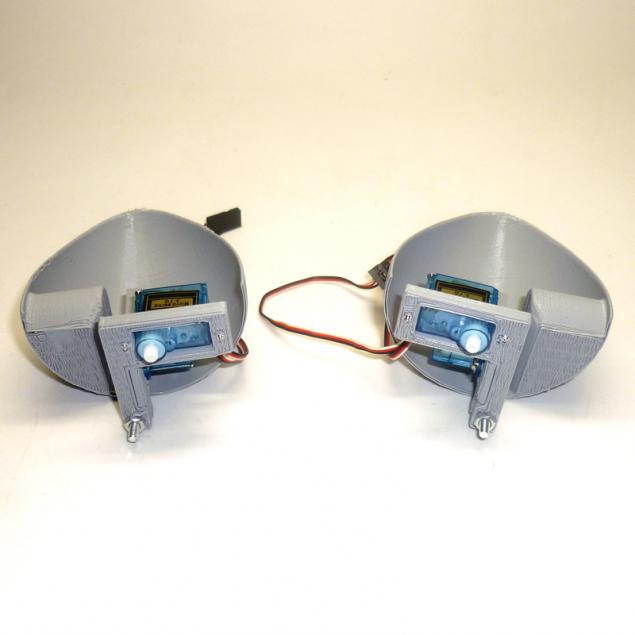
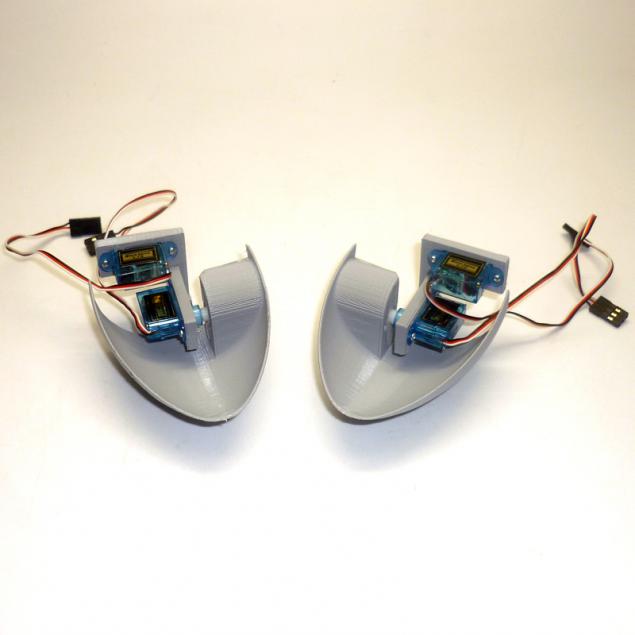
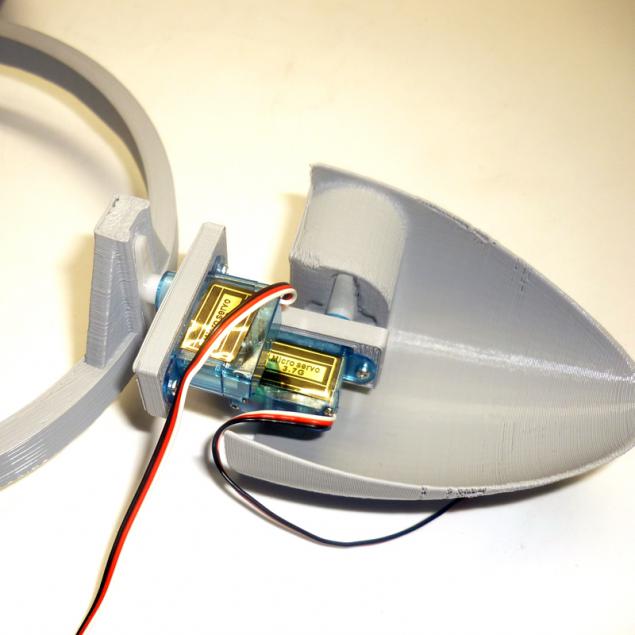
К ободку уши крепятся маленьким саморезом сквозь отверстие. Для полного понимания рассмотрим рисунки:
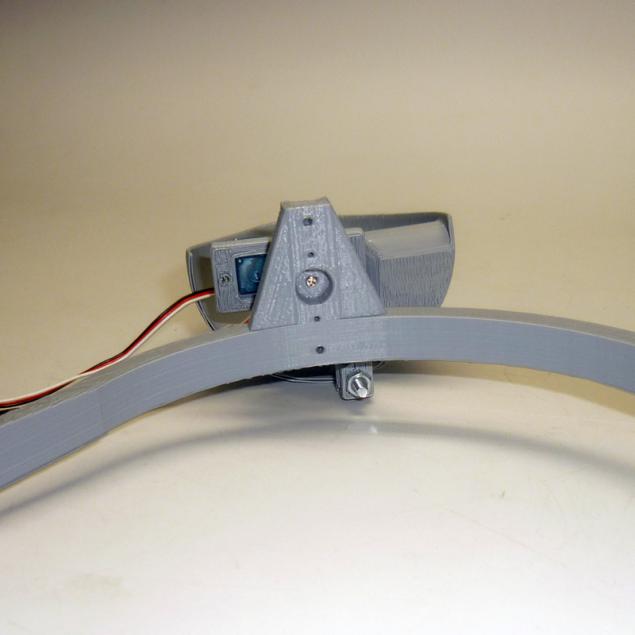
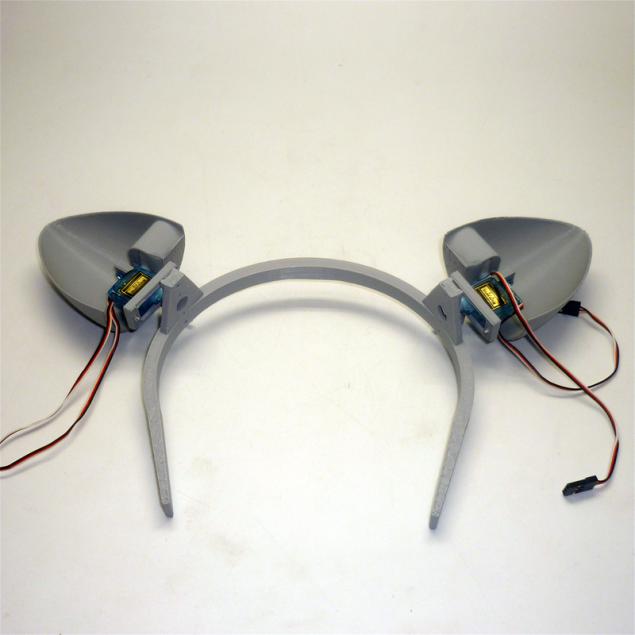
В итоге получаем:
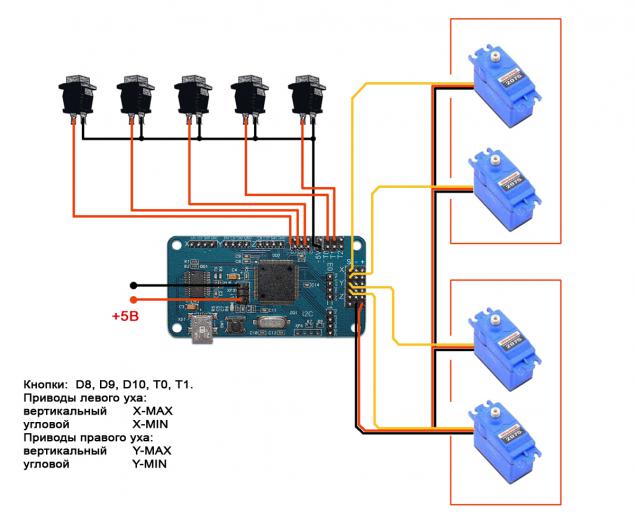
Электрическая схема
Сервомоторчики ушек управляются с помощью контроллера Arduino Nano или MP1511. Скетчи для загрузки в микроконтроллеры Arduino также можно скачать с нашего сайта.
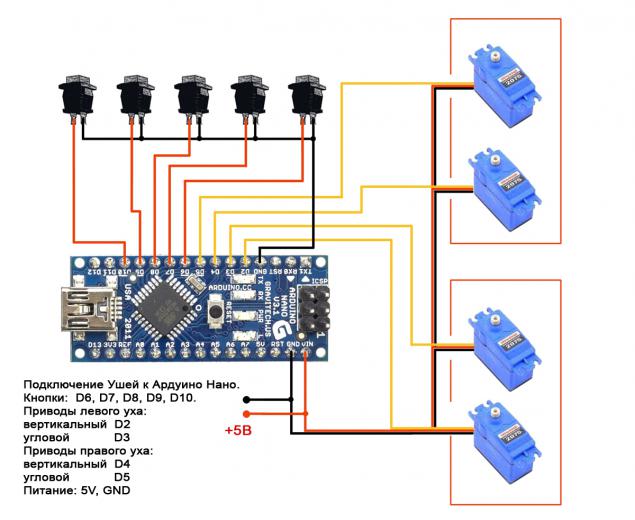
Для ушек были придуманы 5 спецэффектов, каждый из которых включается нажатием кнопки. Это: машет левым ухом, машет правым ухом, машет обеими ушками, оба уха опускаются, оба уха приподнимаются. Но вы можете придумать свои эффекты и переделать скетч.
А теперь сравним.
Наш Котэ:
Японские MiMi:
Материал предоставлен нашим DIY-направлением — Мастер Кит.
Источник: geektimes.ru/company/dadget/blog/247130/
Чуть больше года назад мне показали концепт видео с «necomimi» – откровенно фриковский гаджет. Это кошачьи ушки, управляемые с помощью сигналов мозга считываемых с помощью двух нейросенсоров. Очень эмоциональная игрушка. Сначала хотелось купить её разобрать и собрать как-то по другому. Почему по другому? Я посмотрел в сети очень много видео про эти «мими» и понял, что во первых уши двигаются только в одной плоскости, что выглядит как-то скованно. Настоящие кошарики двигают ушами во всех степенях свободы. А во вторых вот эти нейросигналы с нейродатчиками какая-то сомнительная технология. Мелким девчонкам с трудом удавалось пошевелить ушками, как бы они не морщили свой лобик, пытаясь представить рожок мороженого. Одна даже плакала.
У нас всё будет по другому: уши будут свободно двигаться в двух плоскостях, а управлять ими будем простым нажатием кнопки на пульте. И для каждой кнопки придумаем и запрограммируем свой спецэффект. Короче. Соберем несложного робота-аниматроника, запрограммированного на движения, имитирующие движение кошачьих ушей.
Что нам понадобится?
1. Микроконтроллер Arduino Nano или MP1511 от МастерКит
2. Четыре сервомашинки. Микро или мини. На 180 градусов.
3. Пять кнопок и включатель
4. Источник питания в 5-6 В (четыре пальчиковые батарейки или ещё лучше повербанк для смартфона)
5. Немного проводов, паяльник
6. Нитка с иголкой
7. Два лоскута фетровой ткани разных цветов
8. Пару часов свободного времени
9. Но самое главное – доступ к 3D принтеру. На нем то и будем печатать каркас ушей и кинематику.
10. Свободный вечер ))
Файлы ушек, каркаса и ободка для крепления сервомашинок выложены в виде STL-файлов на нашем сайте на этой странице. Они адаптированы для печати на MC3. Но, впрочем, их можно печатать на любом 3D принтере. Корпус для контроллера и кнопок каждый может придумать сам.
Сборка кинематики
Когда все детали будут напечатаны, приступим к сборке. Комплект для каждого уха состоит из трех деталей: самого ушка и двух деталей для крепления сервомоторчиков.
Скрепляем винтом с гайкой детали для сервомоторчиков как показано на рисунке. Должны получиться два симметричных каркаса:

На сделанные ранее каркасы закрепите сервомашинки как показано на рисунках. Нужны три самореза – два больших и один маленький (сервомашинки идут всегда в комплекте с саморезами). Двумя большими саморезами прикручивается сама сервомашинка, а маленьким качалка к её оси.


Прикрепляем уши
В первую очередь необходимо отцентрировать оси. Ось сервомашинки может двигаться только на 180 градусов. Одеваем на ось длинную качалку, осторожно прокручивая ось, находим крайние точки, выводим ось на середину, вытаскиваем качалку и вновь устанавливаем её перпендикулярно корпусу сервомашинки. Вторую сервомашинку которая будет крепится на ободок центрируем точно также.
Далее через отверстие в платформе для крепления сервомашинки маленьким саморезом закрепляем машинку на ухе. Внимательно смотрим рисунки:



К ободку уши крепятся маленьким саморезом сквозь отверстие. Для полного понимания рассмотрим рисунки:



В итоге получаем:

Электрическая схема
Сервомоторчики ушек управляются с помощью контроллера Arduino Nano или MP1511. Скетчи для загрузки в микроконтроллеры Arduino также можно скачать с нашего сайта.


Для ушек были придуманы 5 спецэффектов, каждый из которых включается нажатием кнопки. Это: машет левым ухом, машет правым ухом, машет обеими ушками, оба уха опускаются, оба уха приподнимаются. Но вы можете придумать свои эффекты и переделать скетч.
А теперь сравним.
Наш Котэ:
Японские MiMi:
Материал предоставлен нашим DIY-направлением — Мастер Кит.
Источник: geektimes.ru/company/dadget/blog/247130/
Портал БАШНЯ. Копирование, Перепечатка возможна при указании активной ссылки на данную страницу.