1156
Ми друкуємо вуха на принтері 3D або нашому Коте проти. Японська MiMi
Animatronics – це створення мобільних роботів, які мітують рухи живих істот, реальних або фантастичних.
Трохи за рік тому я показав концепт-відео з «некомієм» – відверто Fryakov гаджетом. Ці кітові вуха, що контролюються мозковими сигналами, прочитаними двома нейросенсорами. Дуже емоційна іграшка. Спочатку я хотів купити його і зібрати її в інший спосіб. Чому? Я дивився багато відео в мережі про ці мимі і зрозумів, що перші вуха рухаються тільки в одній площині, яка виглядає дещо обмежена. Реальні коти рухають вуха у всіх градусах свободи. І по-друге, ці невралові сигнали з нейросенсорами є деякими сумнівними технологіями. Маленькі дівчата навряд чи можуть пересуватися вухами, незалежно від того, як вони зморли свої лоби, намагаючись уявити морозиво конуса. Один парний.
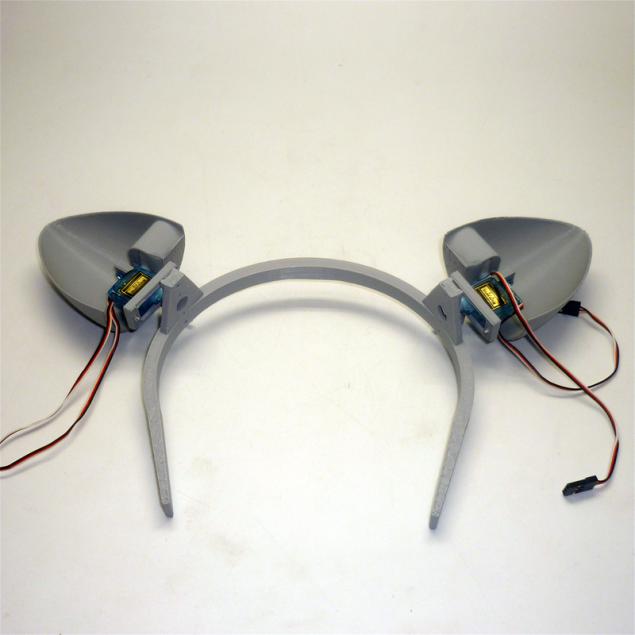
Все буде різним: вуха вільно рухаються в двох площинах, і ми контролюємо їх просто натискаючи кнопку на пульті дистанційного керування. І для кожної кнопки ми будемо вдаватися і запрограмуємо наш особливий ефект. Проксимус Побудувати простий робот аніматронічний, запрограмований для рухів, які мітують рух кішок вуха.
Що потрібно?
1,1 км Мікроконтролер Arduino Nano або MP1511 від Master Комплекти
2,2 км Чотири сервомашини. Мікро або міні. 180 градусів.
3. У П'ять гудзиків і перемикачів
4. У Живлення в 5-6 V (чотирьох батарейок або навіть краще, супербанк для смартфона)
5. Умань Деякі дроти, паяльник.
6. Жнівень голка нитка
7. Про нас Дві клапті відчував тканину різних кольорів
8. У Пара години вільного часу
9. Навігація Найголовніше, доступ до принтера 3D. Далі будемо друкувати каркас вух і кінематики.
10. Безкоштовний вечір
Файли вух, кадру та ріма для монтажу сервомаших машин викладаються у вигляді STL файлів на нашому сайті. Призначені для друку на MC3. Тим не менш, їх можна друкувати на будь-якому принтері 3D. Тіло для контролера і кнопок кожен може придумати себе.
Кінематичний збір
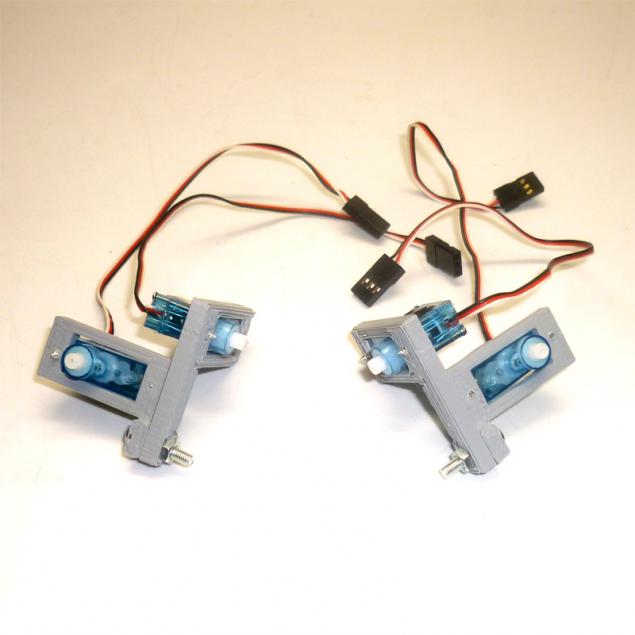
Коли всі деталі друкуються, ми почнемо монтаж. Набір для кожного вуха складається з трьох частин: самого вуха і двох частин для кріплення серводвигунів.
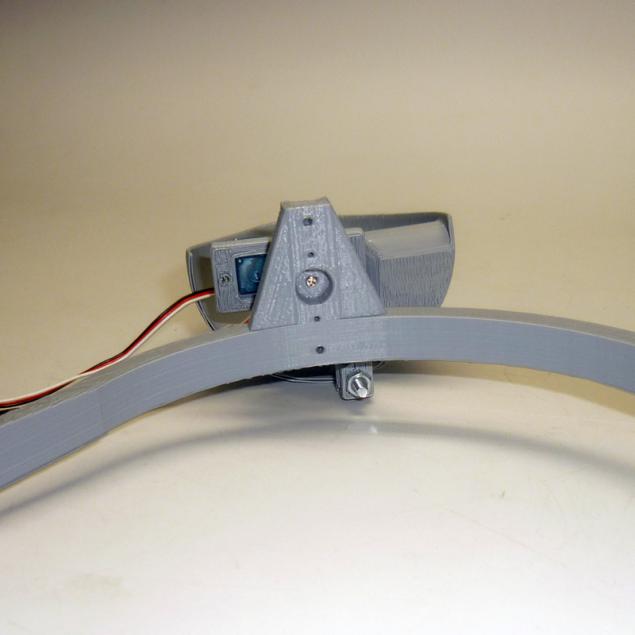
Закріплюємо шуруп з горіховими частинами для серводвигунів, як показано на малюнку. Слід бути двома симетричними рамами:
 р.
р.
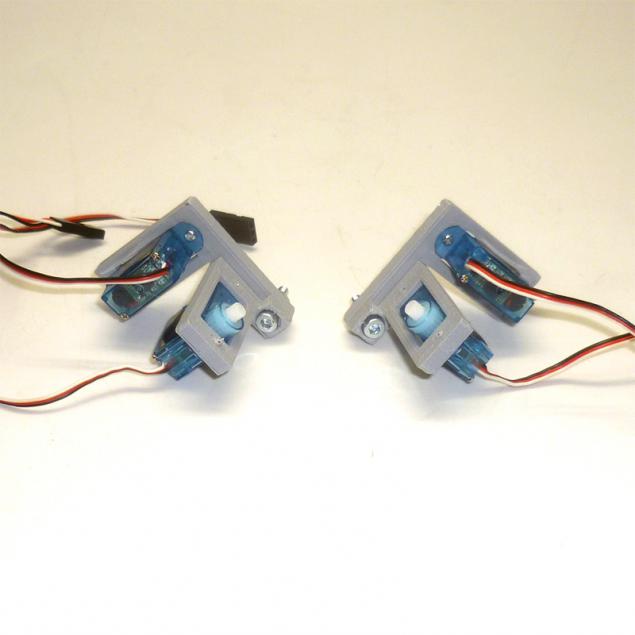
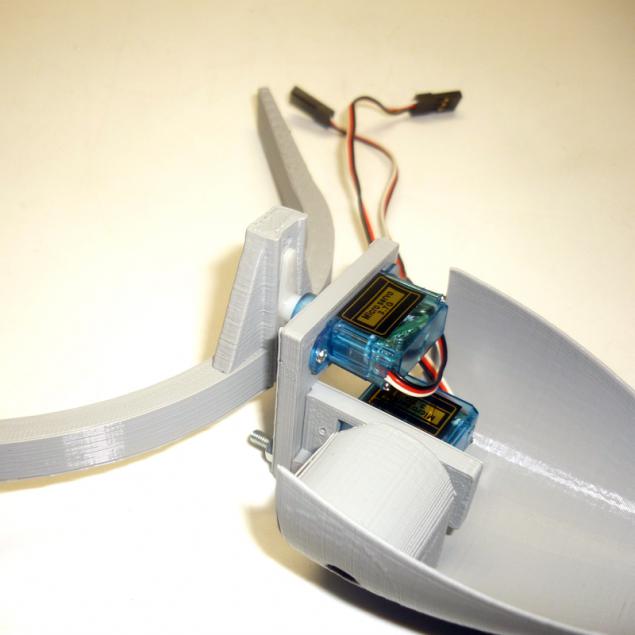
На попередньо виготовлених кадрах зафіксуйте машини серво як показано на фігурах. Вам потрібні три гвинти - два великих і один невеликий (сервери завжди комплектуються гвинтами). Дві великі гвинти закручують сам сервомашину, а невеликий скалка до осі.
 р.
р.
Поставте вуха на.
По-перше, віски повинні бути зосереджені. Ось сервомашина може перенести лише 180 градусів. Покладаємо на віссю довгу скелясту глину, ретельно прокручуємо вісь, знаходимо крайні точки, доводять вісь до середини, витягаємо скелясту глину і перекидаємо її перпендикулярно до тіла сервомашини. Друга сервомашина, яка буде прикріплена до обіду, розташованого точно так само.
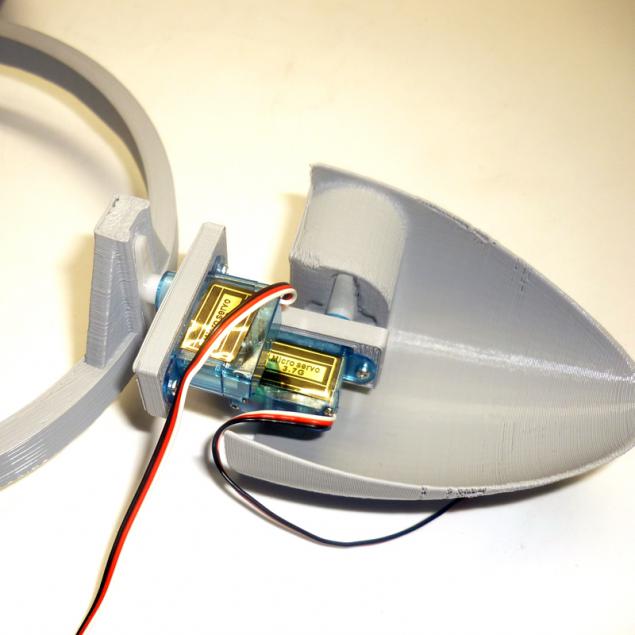
Далі через отвір в майданчику для кріплення сервомашини з невеликим гвинтом, закріплюємо машинку на вухо. Дивіться креслення ретельно:
910775
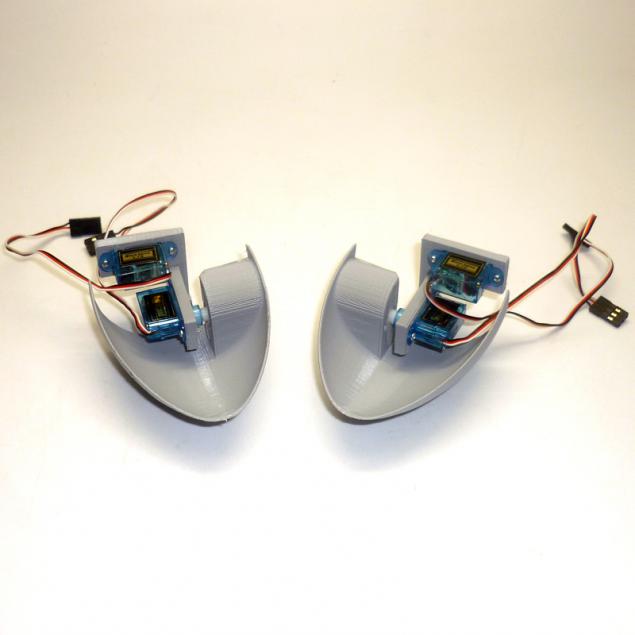
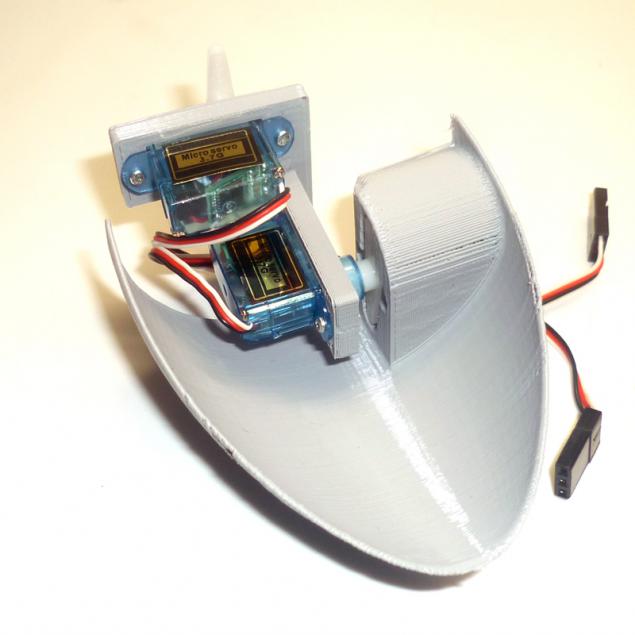
До обіду вуха кріпляться невеликим гвинтом через отвір. Для повного розуміння розглянемо креслення:
 р.
р.
 Р.
Р.
В кінці:
Електрична схема
Серводвигуни вуха контролюються контролером Arduino Nano або MP1511. Начерки для завантаження мікроконтролерів Arduino також можна завантажити з нашого сайту.
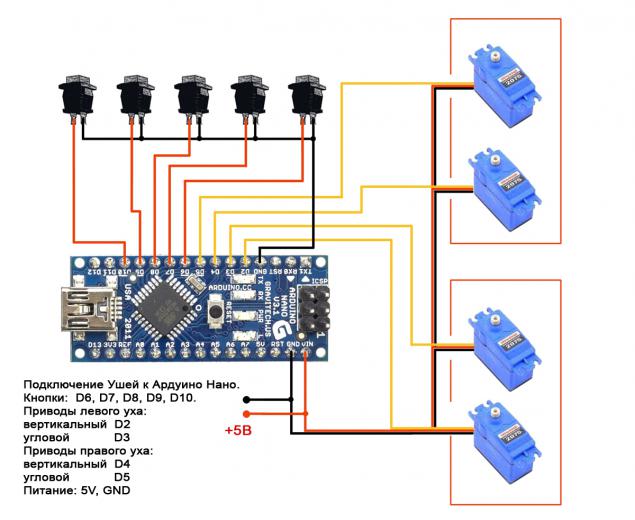
5 спеціальних ефектів були винайдені для вух, кожен з яких перетворюється на натискання кнопки. Це вівся в ліву вухо, відкинувши праву вухо, відкидаючи як вуха, так і вуха вниз, як вуха вгору. Але ви можете придумати свої ефекти і відтворити ескіз.
Тепер порівнювати.
Наш кіот:
Японська MiMi:
Матеріал, що надається нашим DIY-direction - майстер-комплект.
Джерело: geektimes.ru/company/dadget/blog/247130/
Трохи за рік тому я показав концепт-відео з «некомієм» – відверто Fryakov гаджетом. Ці кітові вуха, що контролюються мозковими сигналами, прочитаними двома нейросенсорами. Дуже емоційна іграшка. Спочатку я хотів купити його і зібрати її в інший спосіб. Чому? Я дивився багато відео в мережі про ці мимі і зрозумів, що перші вуха рухаються тільки в одній площині, яка виглядає дещо обмежена. Реальні коти рухають вуха у всіх градусах свободи. І по-друге, ці невралові сигнали з нейросенсорами є деякими сумнівними технологіями. Маленькі дівчата навряд чи можуть пересуватися вухами, незалежно від того, як вони зморли свої лоби, намагаючись уявити морозиво конуса. Один парний.
Все буде різним: вуха вільно рухаються в двох площинах, і ми контролюємо їх просто натискаючи кнопку на пульті дистанційного керування. І для кожної кнопки ми будемо вдаватися і запрограмуємо наш особливий ефект. Проксимус Побудувати простий робот аніматронічний, запрограмований для рухів, які мітують рух кішок вуха.
Що потрібно?
1,1 км Мікроконтролер Arduino Nano або MP1511 від Master Комплекти
2,2 км Чотири сервомашини. Мікро або міні. 180 градусів.
3. У П'ять гудзиків і перемикачів
4. У Живлення в 5-6 V (чотирьох батарейок або навіть краще, супербанк для смартфона)
5. Умань Деякі дроти, паяльник.
6. Жнівень голка нитка
7. Про нас Дві клапті відчував тканину різних кольорів
8. У Пара години вільного часу
9. Навігація Найголовніше, доступ до принтера 3D. Далі будемо друкувати каркас вух і кінематики.
10. Безкоштовний вечір
Файли вух, кадру та ріма для монтажу сервомаших машин викладаються у вигляді STL файлів на нашому сайті. Призначені для друку на MC3. Тим не менш, їх можна друкувати на будь-якому принтері 3D. Тіло для контролера і кнопок кожен може придумати себе.
Кінематичний збір
Коли всі деталі друкуються, ми почнемо монтаж. Набір для кожного вуха складається з трьох частин: самого вуха і двох частин для кріплення серводвигунів.
Закріплюємо шуруп з горіховими частинами для серводвигунів, як показано на малюнку. Слід бути двома симетричними рамами:
 р.
р.На попередньо виготовлених кадрах зафіксуйте машини серво як показано на фігурах. Вам потрібні три гвинти - два великих і один невеликий (сервери завжди комплектуються гвинтами). Дві великі гвинти закручують сам сервомашину, а невеликий скалка до осі.
 р.
р.
Поставте вуха на.
По-перше, віски повинні бути зосереджені. Ось сервомашина може перенести лише 180 градусів. Покладаємо на віссю довгу скелясту глину, ретельно прокручуємо вісь, знаходимо крайні точки, доводять вісь до середини, витягаємо скелясту глину і перекидаємо її перпендикулярно до тіла сервомашини. Друга сервомашина, яка буде прикріплена до обіду, розташованого точно так само.
Далі через отвір в майданчику для кріплення сервомашини з невеликим гвинтом, закріплюємо машинку на вухо. Дивіться креслення ретельно:
910775


До обіду вуха кріпляться невеликим гвинтом через отвір. Для повного розуміння розглянемо креслення:

 р.
р. Р.
Р.В кінці:

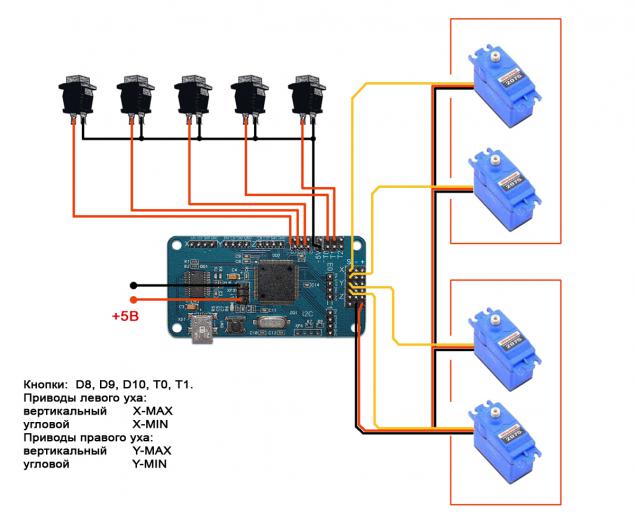
Електрична схема
Серводвигуни вуха контролюються контролером Arduino Nano або MP1511. Начерки для завантаження мікроконтролерів Arduino також можна завантажити з нашого сайту.


5 спеціальних ефектів були винайдені для вух, кожен з яких перетворюється на натискання кнопки. Це вівся в ліву вухо, відкинувши праву вухо, відкидаючи як вуха, так і вуха вниз, як вуха вгору. Але ви можете придумати свої ефекти і відтворити ескіз.
Тепер порівнювати.
Наш кіот:
Японська MiMi:
Матеріал, що надається нашим DIY-direction - майстер-комплект.
Джерело: geektimes.ru/company/dadget/blog/247130/