1155
Lengüetas de impresión en la impresora 3D o nuestra Kote contra el MiMi japonés
animatronics -. La creación de robots móviles que imitan los movimientos de los seres vivos, reales o imaginarios I>
A poco más de un año atrás me mostró un concepto de vídeo «necomimi» - francamente adminículo frikovsky. Este gato oídos controlan mediante señales cerebrales leídos por dos neyrosensorov. Juguete muy emocional. Primero quería comprar su desmonte y vuelva a montar alguna manera diferente. ¿Por qué hacer de manera diferente? Miré de vídeo en línea acerca de una gran cantidad de estos "Mimi" y me di cuenta que en primer lugar orejas se mueven en un solo plano que parece algo torpe. Estos koshariki mueven oídos en todos los grados de libertad. Y en segundo lugar Estas señales neuronales con neyrodatchikami alguna tecnología cuestionable. Pequeñas niñas apenas podían mover sus orejas, como si no se arrugan la frente, tratando de cono de helado. Uno incluso llorado.
Todos vamos a ser diferentes: las orejas tendrán libertad para moverse en dos planos, y gestionarlos simplemente pulsando un botón en el control remoto. Y para cada botón y llegar a su programa un efecto especial. Shorter. Recoger animatronics robot simples programados al movimiento que simulan el movimiento de las orejas del gato.
¿Qué necesitamos? B>
1. El microcontrolador Arduino Nano o MP1511 de paletas
2. Cuatro servos. Micro o mini. 180 grados.
3. Cinco botones y cambiar
4. Fuente de alimentación 5-6 (cuatro pilas pequeñas o incluso mejor teléfono inteligente poverbank)
5. Un poco de cables,
soldadura 6. Enhebrar una aguja con
7. Dos colgajo sintió tela de diferentes colores
8. Un par de horas de
tiempo libre 9. Pero lo más importante - el acceso a una impresora 3D. A continuación, se imprimirá oídos del marco y cinemática.
10. Tarde libre))
Archivos pestañas marco y la llanta para servos de montaje están dispuestas en forma de STL-archivos en nuestro sitio web en esta página a >. Están adaptados para imprimir en MC3. Pero, sin embargo, que se pueden imprimir en cualquier impresora 3D. Vivienda para la central y pulsadores que cada uno puede llegar a mí mismo.
Construir cinemática
Cuando se imprimen todos los elementos, proceder a la asamblea. Kit para cada oído se divide en tres partes: en la ficha en sí, y las dos partes para fijar servomotorchikov.
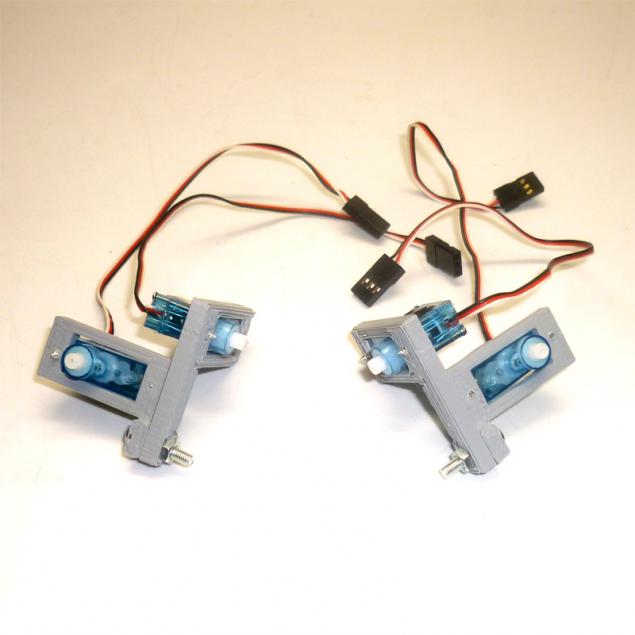
El tornillo y la tuerca de sujeción de piezas servomotorchikov como se muestra en la figura. Deben recibir dos marco simétrico:

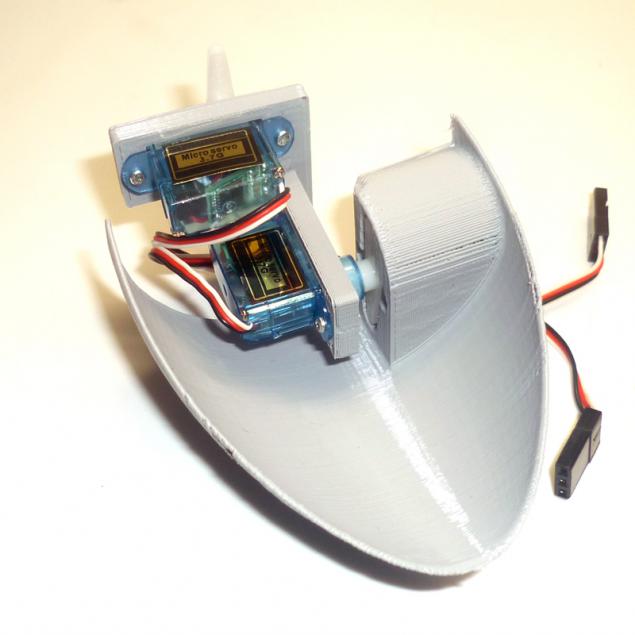
En los marcos realizados previamente conectar el servo como se muestra en las figuras. Necesidad de tres tornillos - dos grandes y uno pequeño (servos son siempre completa con tornillos). Dos tornillos grandes atornillan en sí servo y un pequeño balanceo a su eje.
Adjuntar oídos
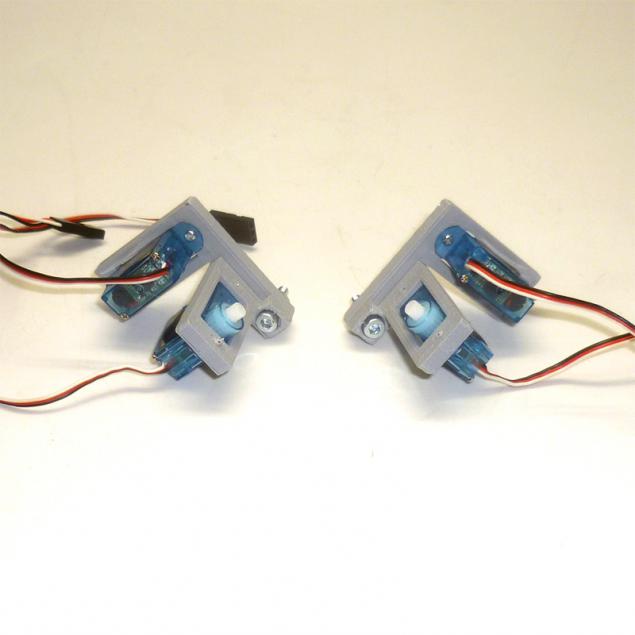
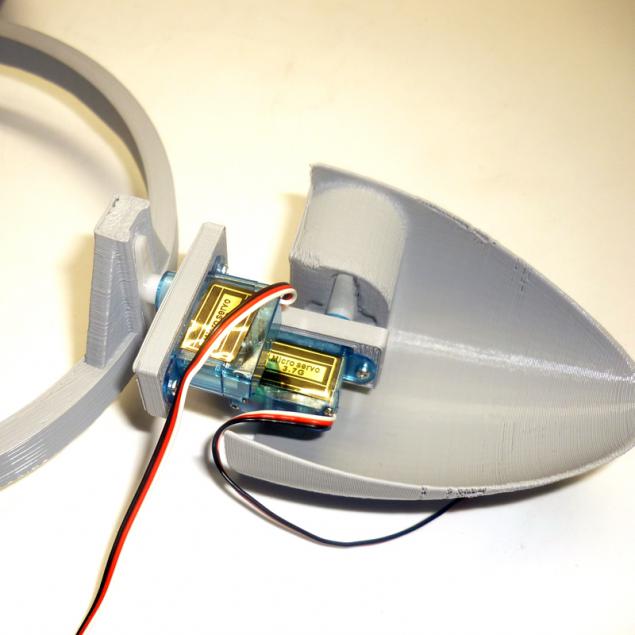
En primer lugar, es necesario centrar el eje. Eje servo sólo puede moverse 180 grados. Viste en el eje de un eje se desplaza suavemente largo balanceo, nos encontramos con puntos extremos, se deriva la mitad del eje, sacar y volver a establecer el balanceo de su cuerpo perpendicular a los servos. Segundo servo para ser montado en el centro de la llanta de la misma manera.
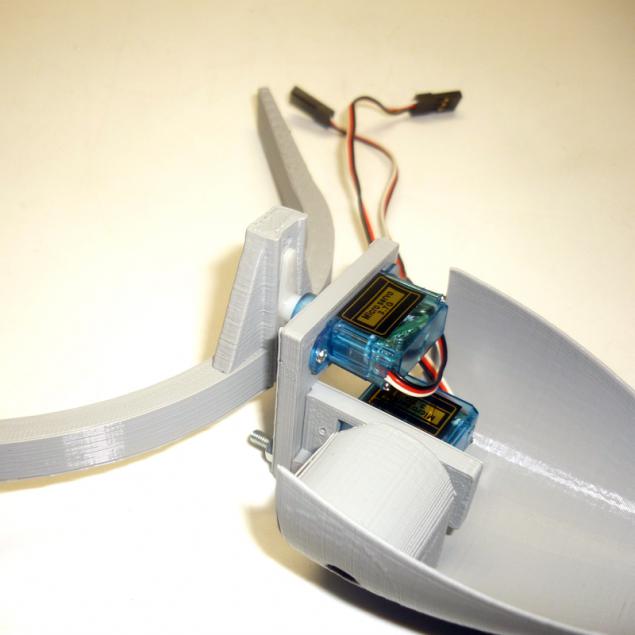
Además, a través del agujero en la plataforma para el montaje servos tornillos pequeños de anclaje de la máquina en la oreja. Observe cuidadosamente los dibujos:
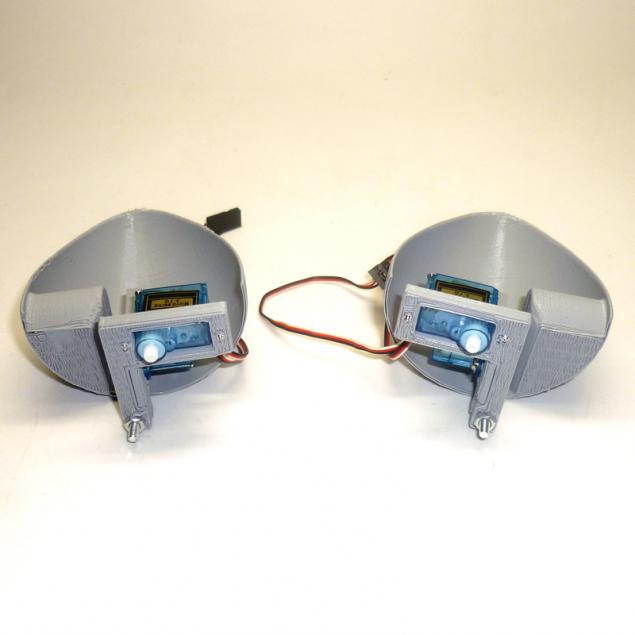
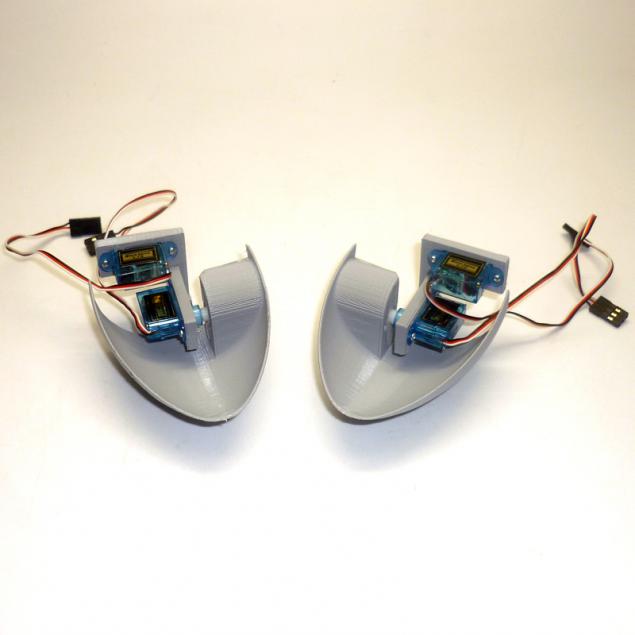
Por los oídos de llanta adjunta pequeños tornillos a través del agujero. Para entender plenamente, considere dibujos:
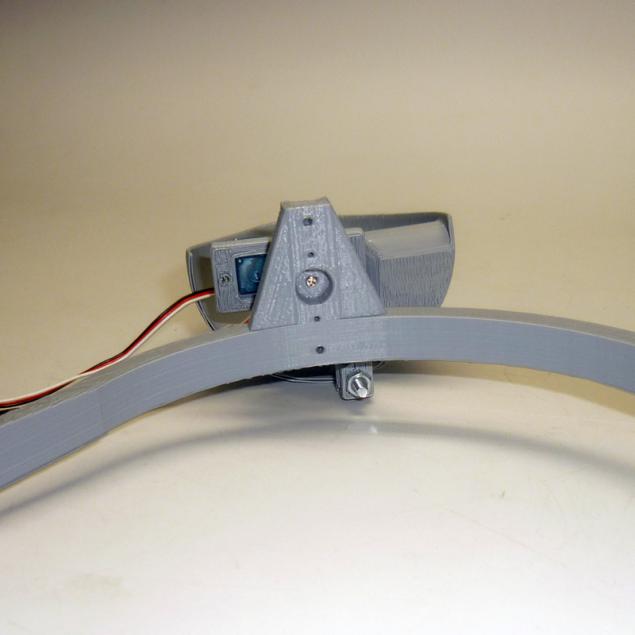
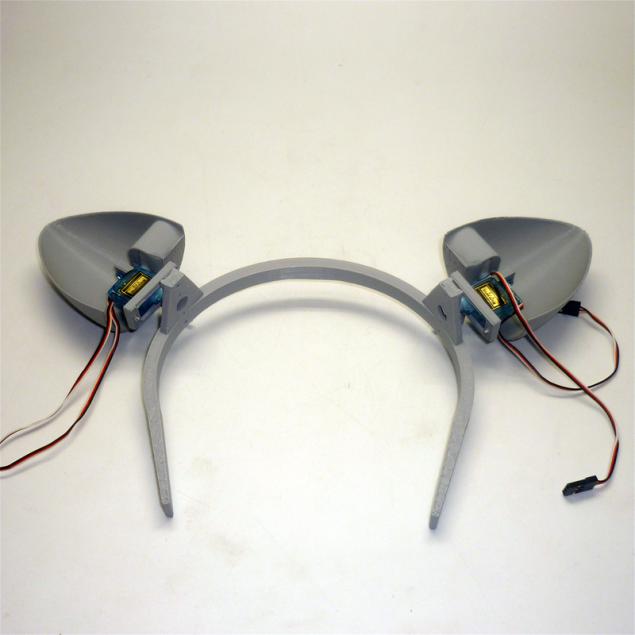
Como resultado, se obtiene:
Esquema eléctrico
Oídos Servomotorchiki son controlados por un controlador Arduino Nano o MP1511. Bocetos para microcontroladores Arduino descarga también se pueden descargar desde nuestra .
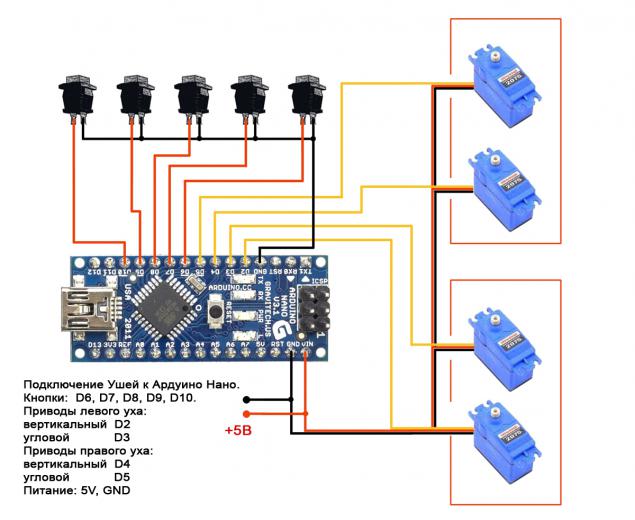
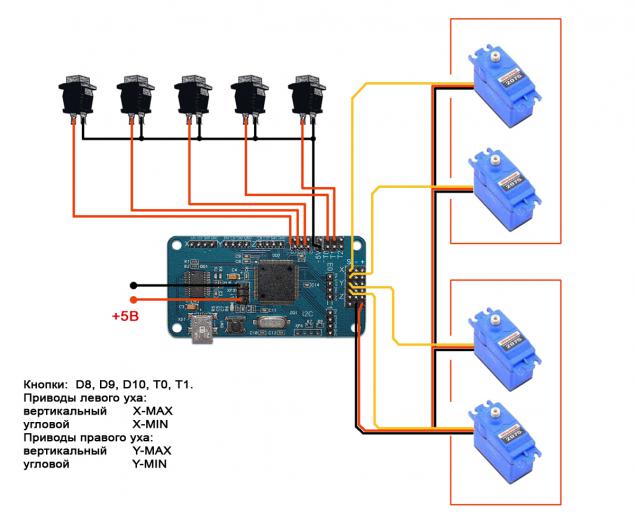
Para los oídos se inventaron 5 efectos especiales, cada una de las cuales se activa pulsando un botón. Estos son: El agitar de la oreja izquierda, oreja derecha agitar, agitar las dos orejas, dos orejas bajaron, levantó ambos oídos. Pero uno se puede topar con sus efectos, y convertir el boceto.
Ahora comparemos.
Nuestra Kote:
MiMi japonés:
El material proporcionado por nuestro DIY-dirección - Kit Maestro.
Fuente:
A poco más de un año atrás me mostró un concepto de vídeo «necomimi» - francamente adminículo frikovsky. Este gato oídos controlan mediante señales cerebrales leídos por dos neyrosensorov. Juguete muy emocional. Primero quería comprar su desmonte y vuelva a montar alguna manera diferente. ¿Por qué hacer de manera diferente? Miré de vídeo en línea acerca de una gran cantidad de estos "Mimi" y me di cuenta que en primer lugar orejas se mueven en un solo plano que parece algo torpe. Estos koshariki mueven oídos en todos los grados de libertad. Y en segundo lugar Estas señales neuronales con neyrodatchikami alguna tecnología cuestionable. Pequeñas niñas apenas podían mover sus orejas, como si no se arrugan la frente, tratando de cono de helado. Uno incluso llorado.
Todos vamos a ser diferentes: las orejas tendrán libertad para moverse en dos planos, y gestionarlos simplemente pulsando un botón en el control remoto. Y para cada botón y llegar a su programa un efecto especial. Shorter. Recoger animatronics robot simples programados al movimiento que simulan el movimiento de las orejas del gato.
¿Qué necesitamos? B>
1. El microcontrolador Arduino Nano o MP1511 de paletas
2. Cuatro servos. Micro o mini. 180 grados.
3. Cinco botones y cambiar
4. Fuente de alimentación 5-6 (cuatro pilas pequeñas o incluso mejor teléfono inteligente poverbank)
5. Un poco de cables,
soldadura 6. Enhebrar una aguja con
7. Dos colgajo sintió tela de diferentes colores
8. Un par de horas de
tiempo libre 9. Pero lo más importante - el acceso a una impresora 3D. A continuación, se imprimirá oídos del marco y cinemática.
10. Tarde libre))
Archivos pestañas marco y la llanta para servos de montaje están dispuestas en forma de STL-archivos en nuestro sitio web en esta página a >. Están adaptados para imprimir en MC3. Pero, sin embargo, que se pueden imprimir en cualquier impresora 3D. Vivienda para la central y pulsadores que cada uno puede llegar a mí mismo.
Construir cinemática
Cuando se imprimen todos los elementos, proceder a la asamblea. Kit para cada oído se divide en tres partes: en la ficha en sí, y las dos partes para fijar servomotorchikov.
El tornillo y la tuerca de sujeción de piezas servomotorchikov como se muestra en la figura. Deben recibir dos marco simétrico:

En los marcos realizados previamente conectar el servo como se muestra en las figuras. Necesidad de tres tornillos - dos grandes y uno pequeño (servos son siempre completa con tornillos). Dos tornillos grandes atornillan en sí servo y un pequeño balanceo a su eje.


Adjuntar oídos
En primer lugar, es necesario centrar el eje. Eje servo sólo puede moverse 180 grados. Viste en el eje de un eje se desplaza suavemente largo balanceo, nos encontramos con puntos extremos, se deriva la mitad del eje, sacar y volver a establecer el balanceo de su cuerpo perpendicular a los servos. Segundo servo para ser montado en el centro de la llanta de la misma manera.
Además, a través del agujero en la plataforma para el montaje servos tornillos pequeños de anclaje de la máquina en la oreja. Observe cuidadosamente los dibujos:



Por los oídos de llanta adjunta pequeños tornillos a través del agujero. Para entender plenamente, considere dibujos:



Como resultado, se obtiene:

Esquema eléctrico
Oídos Servomotorchiki son controlados por un controlador Arduino Nano o MP1511. Bocetos para microcontroladores Arduino descarga también se pueden descargar desde nuestra .


Para los oídos se inventaron 5 efectos especiales, cada una de las cuales se activa pulsando un botón. Estos son: El agitar de la oreja izquierda, oreja derecha agitar, agitar las dos orejas, dos orejas bajaron, levantó ambos oídos. Pero uno se puede topar con sus efectos, y convertir el boceto.
Ahora comparemos.
Nuestra Kote:
MiMi japonés:
El material proporcionado por nuestro DIY-dirección - Kit Maestro.
Fuente: