593
5传感器的自动驾驶仪及其(至今)无法解决的问题
生活不是静止的,"特拉斯"仍然在战斗中(特拉斯模型X太多,但没有帮助的自动驾驶仪). 什么是错的传感器的ADAS系统? 为什么在未来的几年里,什么事也不会发生巨大的变化吗?
许多,令人惊讶的是,有接近他们的身体能力。 我们可以谈论它充满信心,因为下列系统的使用不仅对汽车和大型市场以外的汽车世界。 这是很大一笔钱,数十亿美元的预算用于研发和缓慢的进展。
现在更多。
传感器类型的—就像的手指上的一个方面,五:
什么是重要的是要知道的关于在一般的市场吗?
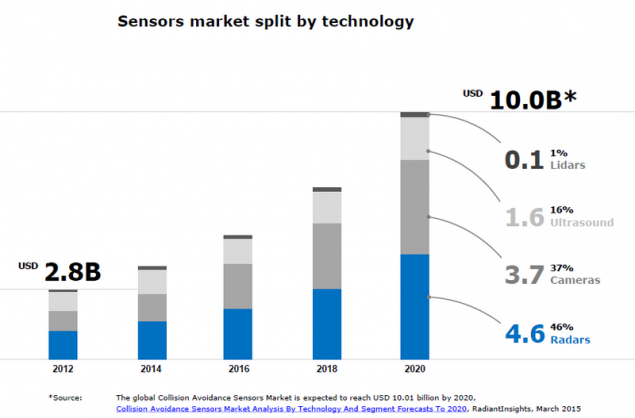
估计各不相同,但该过程是相同的。 平衡被歪曲的赞成票相机和雷达,这两个帐户85%的市场在金钱。 激光雷达仍然是一个利基市场方案(仅限制的突破),以及超声波传感器可以在不超出其适当位置,并打破,再一次,不可见的。 夜视系统正在甚至失去了对光的。
现在更多。
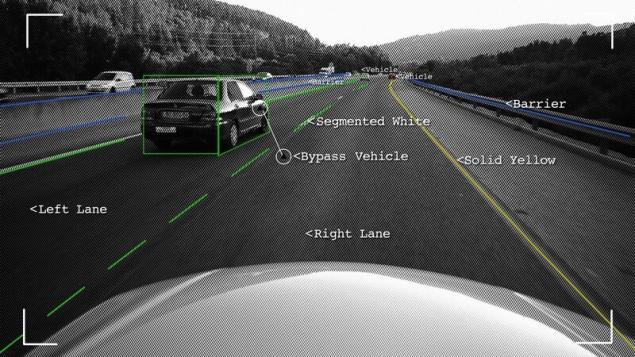
摄像机的工作原理是这样的:获得图片的世界中的可见范围内,处理(个体框架和顺序),确认。
赞成:
只有一个摄像机可以检测道路标记和标志。 相机都有良好的决议的角度,使摄像机的好"明白"的对象,跨越的运动车(滚动道路行人的)。 在画面是从摄像头视频可能分类的对象("狗"、"儿童"的"成人"的"自行车","车","车"). 当然,该照相机可提供一个价格从几百美元买方。 缺点:
摄像机有可怜的决议的范围内,他们很难理解的距离障碍物或速度的趋同(立体照相机的部分解决的问题)。 没有的直接测量速度的目的可以理解,通过一系列的框架,并仍然模糊的测量。 强烈影响的天气和道路条件的臭名昭着的"白色面包车在明亮的天空"在最近的事故。 处理的数据是从摄像头的时间延迟的更大,更复杂的系统的摄像机。 市场践踏大象从英特尔和独到化的情况和麦格纳国际中。 很多的创业企业的进入门槛低。 该技术的发展有赖于速度和质量的处理,那就是,处理和算法。 大幅增加,处理的速度不起作用,并突破算法尚未破灭。
结论:没有摄像头在车上仍然是不够的。

雷达被辐射在频率非常高,听取了回,并且立即承认的距离障碍,他们的速度和角度。
赞成:
在雷达是多少受到天气条件的影响,不影响对象的颜色和灯光。 好的决议的范围和速度,提供直接测量的范围和速度与良好的准确性。 瞬间(1月20–1/50的二)数据处理,这是特别重要的高速度。 能够很容易地收集和分析信息的动力,由于小量的信息。 对于相同的理由适用于V2I/V2V缺点:
不便宜,并且经常更昂贵的摄像机。 超过1000美元用于远距离雷达。 可怜的决议的角度(雷达是难以理解的运动横跨). 没有直接的可能性进行分类障碍或估计它的尺寸。 很强的依赖性的范围的视角。 如果你闪耀远梁和狭窄,没有看到干扰的道路和侧面上。 闪耀广泛获得一个较小的范围内。 在市场上的大象,只有与其他名字—Bosch全球的,德尔斐,Smartmicro的。 新创企业几乎没有的门槛很高,由于成本高的设备的下微波炉。 处理方法有所改变小,在过去50年来,投资在发展和组织生产的部件(例如天线-馈道)数百万欧元。 负担得起的和高质量的收发器,没有它没有大规模解决方案,产生了一半,十几家公司在世界各地。 雷达逐渐改善,但发展需要几十年。
结论:对优势的雷达是薄弱的边的摄像机,反之亦然。 没有任何警告,也没有必要的。
不是我的主意,但是先生麝香:
"...也就是说,我不认为你需要激光雷达。 我想你可以这样做的所有与被动的光然后也许有一个前进的雷达...如果你正在驾驶的快速进入雨水或雪或灰尘。 我认为,完全解决了它在不使用激光雷达。 我不是一个大风扇的激光雷达,我不认为很有意义,在这一方面起到举足轻重的作用。"
激光雷达激光测距仪:激光闪闪发光,看去,返回,鉴于一系列要点的距离。
赞成:
Vundervaflâ,看到所有的细节,并具有较高的精度。 除了他们,所以没有人知道而且永远不会。 缺点:
扫描光可以看到同样的路段,只有两个或三倍。 成本高,没有成本的激光雷达。 更光脆弱。 总之,所有其余的缺点在市场上也有坚韧的玩家—Velodyne激光雷达、Quanergy的,生病。 所有决定都比较年轻,新创企业几件,但是相对较大。 做的主要国家在世水平与获得在汽车向几十亿美元的市场并不会。 降低成本的激光雷达和遗弃的移动部件的大幅度下降的可能性和必要性的激光雷达。 所有需要一个解决方案为250美元,但它似乎不够的。
简单而明确:汽车市场对激光雷达、一百倍小于市场的雷达或摄像机,和那些充满和其他应用程序
结论:直到革命的、激光雷达仍将是一个适当位置的解决方案。 好的原型,它并为一个股票的汽车。 与为原型坏:尖锐的通过激光雷达逻辑不能适用于其他传感器。

超声波
熟悉的驻车定位:辐射的高频率的信号,一直等到它来返回,并计数的时间。
赞成:
非常廉价,几百美元一个系统的多个传感器可以很容易地结合起来。 技术进行测试和清楚的,你可以尝试甚至在家里的arduino。 缺点:
范围限制为单位的米。 有没有办法了解的角度对象或直接测量速度。 低可信度的数据。 美国市场的统治中考虑hotel el-paso,清除一个长期的践踏,那些希望投资于新的项目。 创业很少,但有这样的Toposens谁做的最酷的事情上的超声波,但有的东西突然开始做一个雷达。
结论:尽快雷达和光学会工作更近的距离,超声仅为arduino和将保持不变。 开玩笑了:)。

红外线相机
它是如何工作:着红外线范围内,已经分析的图像上的矩阵。
赞成:
清晰可见热的人和森林动物。 缺点:
昂贵,几千美元只用于一个前照相机和一个狭窄的领域的使用限制温度的使用。 结论:即使更多的适当位置的故事,比光的。 雷达激光雷达把他们从汽车市场很快,如果不已。
现在—甜的。 以总结:
没有传感器或传感器系统可不是普遍的。 如果我们谈论的作用的唯一的低端的解决方案是照相机。 其次,该雷达。 任何系统ADAS和特别是因为自动驾驶会使用该系统从多个传感器。 这就是所谓传感器融合,并将主要用来合照相机以及雷达。 我怀疑他们将结束了。 更多样化的信息要收集更多的费用(不是那么糟糕)和更多的时间。 你的时间越长的过程中,速度较慢,我们必须去,这是安全的。 因此,海龟也能大部分的自动驾驶仪及爱的好天气。 出版
P.S.记住,仅仅通过改变他们的消费—我们一起改变世界了。 ©
资料来源:geektimes.ru/post/278534/
许多,令人惊讶的是,有接近他们的身体能力。 我们可以谈论它充满信心,因为下列系统的使用不仅对汽车和大型市场以外的汽车世界。 这是很大一笔钱,数十亿美元的预算用于研发和缓慢的进展。
现在更多。
传感器类型的—就像的手指上的一个方面,五:
- 摄像机
- 雷达,
- 激光雷达
- 超声波,
- 红外照相机。
- 被动(照相机)和活动(雷达激光雷达),
- 在可见的范围(照相机)和(所有的人,包括IR)
- 频率(超声波的激光雷达).
什么是重要的是要知道的关于在一般的市场吗?

估计各不相同,但该过程是相同的。 平衡被歪曲的赞成票相机和雷达,这两个帐户85%的市场在金钱。 激光雷达仍然是一个利基市场方案(仅限制的突破),以及超声波传感器可以在不超出其适当位置,并打破,再一次,不可见的。 夜视系统正在甚至失去了对光的。
现在更多。

摄像机的工作原理是这样的:获得图片的世界中的可见范围内,处理(个体框架和顺序),确认。
赞成:
只有一个摄像机可以检测道路标记和标志。 相机都有良好的决议的角度,使摄像机的好"明白"的对象,跨越的运动车(滚动道路行人的)。 在画面是从摄像头视频可能分类的对象("狗"、"儿童"的"成人"的"自行车","车","车"). 当然,该照相机可提供一个价格从几百美元买方。 缺点:
摄像机有可怜的决议的范围内,他们很难理解的距离障碍物或速度的趋同(立体照相机的部分解决的问题)。 没有的直接测量速度的目的可以理解,通过一系列的框架,并仍然模糊的测量。 强烈影响的天气和道路条件的臭名昭着的"白色面包车在明亮的天空"在最近的事故。 处理的数据是从摄像头的时间延迟的更大,更复杂的系统的摄像机。 市场践踏大象从英特尔和独到化的情况和麦格纳国际中。 很多的创业企业的进入门槛低。 该技术的发展有赖于速度和质量的处理,那就是,处理和算法。 大幅增加,处理的速度不起作用,并突破算法尚未破灭。
结论:没有摄像头在车上仍然是不够的。

雷达被辐射在频率非常高,听取了回,并且立即承认的距离障碍,他们的速度和角度。
赞成:
在雷达是多少受到天气条件的影响,不影响对象的颜色和灯光。 好的决议的范围和速度,提供直接测量的范围和速度与良好的准确性。 瞬间(1月20–1/50的二)数据处理,这是特别重要的高速度。 能够很容易地收集和分析信息的动力,由于小量的信息。 对于相同的理由适用于V2I/V2V缺点:
不便宜,并且经常更昂贵的摄像机。 超过1000美元用于远距离雷达。 可怜的决议的角度(雷达是难以理解的运动横跨). 没有直接的可能性进行分类障碍或估计它的尺寸。 很强的依赖性的范围的视角。 如果你闪耀远梁和狭窄,没有看到干扰的道路和侧面上。 闪耀广泛获得一个较小的范围内。 在市场上的大象,只有与其他名字—Bosch全球的,德尔斐,Smartmicro的。 新创企业几乎没有的门槛很高,由于成本高的设备的下微波炉。 处理方法有所改变小,在过去50年来,投资在发展和组织生产的部件(例如天线-馈道)数百万欧元。 负担得起的和高质量的收发器,没有它没有大规模解决方案,产生了一半,十几家公司在世界各地。 雷达逐渐改善,但发展需要几十年。
结论:对优势的雷达是薄弱的边的摄像机,反之亦然。 没有任何警告,也没有必要的。
不是我的主意,但是先生麝香:
"...也就是说,我不认为你需要激光雷达。 我想你可以这样做的所有与被动的光然后也许有一个前进的雷达...如果你正在驾驶的快速进入雨水或雪或灰尘。 我认为,完全解决了它在不使用激光雷达。 我不是一个大风扇的激光雷达,我不认为很有意义,在这一方面起到举足轻重的作用。"

激光雷达激光测距仪:激光闪闪发光,看去,返回,鉴于一系列要点的距离。
赞成:
Vundervaflâ,看到所有的细节,并具有较高的精度。 除了他们,所以没有人知道而且永远不会。 缺点:
扫描光可以看到同样的路段,只有两个或三倍。 成本高,没有成本的激光雷达。 更光脆弱。 总之,所有其余的缺点在市场上也有坚韧的玩家—Velodyne激光雷达、Quanergy的,生病。 所有决定都比较年轻,新创企业几件,但是相对较大。 做的主要国家在世水平与获得在汽车向几十亿美元的市场并不会。 降低成本的激光雷达和遗弃的移动部件的大幅度下降的可能性和必要性的激光雷达。 所有需要一个解决方案为250美元,但它似乎不够的。
简单而明确:汽车市场对激光雷达、一百倍小于市场的雷达或摄像机,和那些充满和其他应用程序
结论:直到革命的、激光雷达仍将是一个适当位置的解决方案。 好的原型,它并为一个股票的汽车。 与为原型坏:尖锐的通过激光雷达逻辑不能适用于其他传感器。

超声波
熟悉的驻车定位:辐射的高频率的信号,一直等到它来返回,并计数的时间。
赞成:
非常廉价,几百美元一个系统的多个传感器可以很容易地结合起来。 技术进行测试和清楚的,你可以尝试甚至在家里的arduino。 缺点:
范围限制为单位的米。 有没有办法了解的角度对象或直接测量速度。 低可信度的数据。 美国市场的统治中考虑hotel el-paso,清除一个长期的践踏,那些希望投资于新的项目。 创业很少,但有这样的Toposens谁做的最酷的事情上的超声波,但有的东西突然开始做一个雷达。
结论:尽快雷达和光学会工作更近的距离,超声仅为arduino和将保持不变。 开玩笑了:)。

红外线相机
它是如何工作:着红外线范围内,已经分析的图像上的矩阵。
赞成:
清晰可见热的人和森林动物。 缺点:
昂贵,几千美元只用于一个前照相机和一个狭窄的领域的使用限制温度的使用。 结论:即使更多的适当位置的故事,比光的。 雷达激光雷达把他们从汽车市场很快,如果不已。
现在—甜的。 以总结:
没有传感器或传感器系统可不是普遍的。 如果我们谈论的作用的唯一的低端的解决方案是照相机。 其次,该雷达。 任何系统ADAS和特别是因为自动驾驶会使用该系统从多个传感器。 这就是所谓传感器融合,并将主要用来合照相机以及雷达。 我怀疑他们将结束了。 更多样化的信息要收集更多的费用(不是那么糟糕)和更多的时间。 你的时间越长的过程中,速度较慢,我们必须去,这是安全的。 因此,海龟也能大部分的自动驾驶仪及爱的好天气。 出版
P.S.记住,仅仅通过改变他们的消费—我们一起改变世界了。 ©
资料来源:geektimes.ru/post/278534/