1244
锯 - 取胜。如何物体的机器人托德博特检
哈卜尔您好!在这里,我们又来了!在perekor设置怀疑论者谁常来我们的方式,我们将继续开发项目“机器人托德博特»。这篇文章是延续熟人模块MoveIt 作为一种管理工具操纵的。
首先我想说的是,我们在捕捉和第一运动所操纵的对象,以及识别物体,但第一件事情的问题取得显著的结果。
理论关于捕获在MoveIt H4>捕获所述对象的位可被表示为一个传送器组成的几个阶段,其计算已准备好是一个完整路径,从机械手的初始位置开始,并引导升降的对象。这些计算是基于以下数据:
- 在规划阶段,它提供了一个工具,规划现场监测
- 用于捕获
- 对象标识符姿态捕获刷此对象 ul>该在后者的又包含以下数据:
- 在该“刷”机械手的位置和方向
- 成功捕捉了这个位置上的期望概率
- 预手臂的方法,它被定义为矢量的方向 - 最小/期望的接近距离< /
- 偏移臂后发作,这被定义为矢量的方向 - 最小距离的缩进
- 最大夹紧力 ul>开始之前的输送系统,就必须产生期权持仓刷捕捉到我们的工厂。在我们的情况下,我们做了所有拍摄的对象是矩形形状的假设。相应地,捕获作为两个手指,我们只有两对平面为对象的一个安全把手,不包括顶部和底部,在其上的主体。由此,生成的一个,另一对平面的捕获半球形的位置。
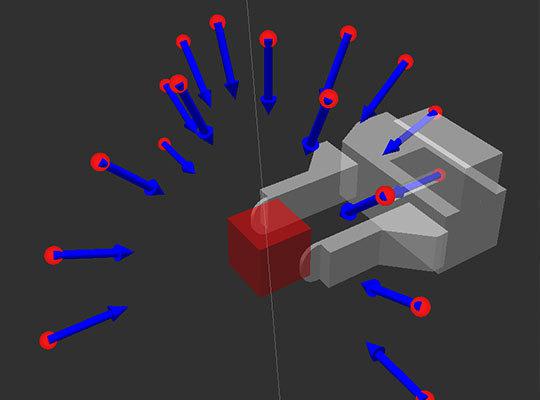
其中所产生的可能的姿势集,我们必须淘汰那些不符合我们的形式捕获/刷,然后转移剩余输送的轨迹来实现这些姿势的进一步规划姿势。
在管道提出这个问题,有三个要点:
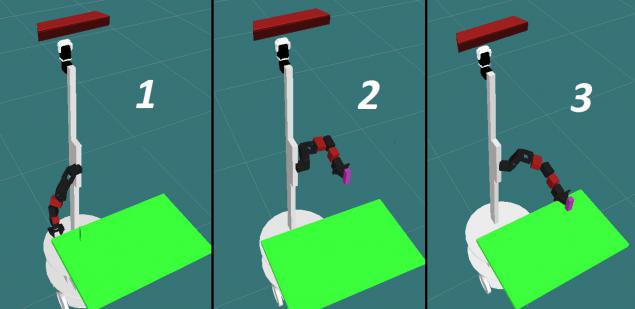
1-初始位置; 2位predzahvata; 3 - 位置捕捉;
在各个搬送路的执行将被加入到最终计划用于提高受试者。如果癫痫发作已成功通过所有阶段,才把计划可以被执行。算法输送一般是这样的:
<01> - 它是从初始位置的点predzahvata计划轨迹。要绘制在跑道上的飞机降落一个比喻,它会进场。
- 对环境的所有对象最初包括在碰撞的矩阵,我们写这个位置 。那我们的拍摄很成功,碰撞检测将被禁用。然后打开捕获。
- 从点计算的操盘手法的轨迹的对象指向predzahvata捕捉。
- 关闭的抓地力。
- 拍摄的对象仍是由对象碰撞所以唯一不同的是现在他是捕获部分代表和规划的轨迹时考虑。
- 位置捕获点predzahvata那么生成的轨迹缩进从对象和固定提高主体的结果表面分离。 LI> OL>现在可以做出一个包含所有必要的道路建设计划。< BR />
这还是没有说 H4>进气道试验中,我们决定把我们的手添加到原四自由度是两个。视频和照片被显示为红色。这是由于这样的事实,即在捕获在叉子或拟人刷的形式的情况下,需要良好的柔韧性操纵器。顺便说一下,如果用作吸杯抓握,所有稍微简化和4可以是足够的自由度,因为用于捕获仅在一个平面。
事实上,捕捉性能的能力很大程度上依赖于一代位置捕获:更大和更多样化的位置将产生,就越容易将是选择最佳的。虽然这一切有一个缺点:在更多的位置,时间越长进行处理。在我们的例子中,我们首先产生10,34的位置,然后68,然后136,给了我们最好的选择 - 34的位置。随着机械手的位置最低数量是相当困难的产生通常姿势操盘只是身体不能达到它:无法蠕动了这样,过短,过长等目前34的2至5个产品满足所有的条件。
对象识别 H4>为此,我们决定使用一个节点ROS tabletop_object_detector。它是由加拿大英属哥伦比亚大学的科学家们认识,并证明自己是。虽然,在我看来,制度的选择应该直接取决于你打算申请承认和条件需要被识别的物体。在这种情况下,肯定是在对象的形式,如果你需要区分银行,从银行的黄瓜西红柿,那么这种方法是行不通的。为了确定使用Kinect的获得深度相机的数据对象。
在你意识到,你必须先训练系统 - 以创建所需的对象的三维模型
。

3D模型包装品客
然后,该系统将接收到的数据与数据库中的现有模型进行比较。
识别结果如下:
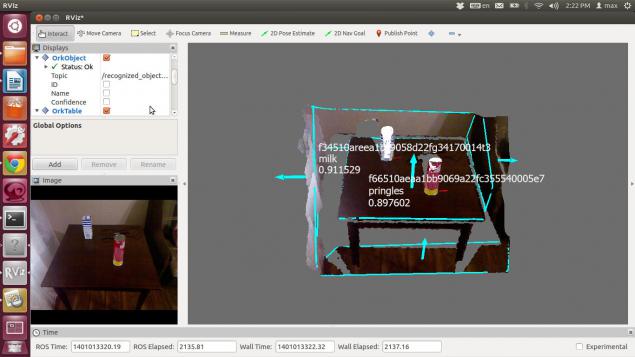
如可预期的,发现物体的速率直接取决于机器在其上的数据处理的能力。我们使用了Intel Core 2 Duo处理器和3GB内存的笔记本电脑。因而物体的识别时间约1,5 - 2秒。
,当然,能够分离和鉴定,在环境中的对象,现在我想拿起和移动它们。下一步将是识别和管理一个真正的机器人机械手的集成问题。
来源: habrahabr.ru/company/tod/blog/224765/