2412
可编程机器人布朗尼版本0.4

开源项目,在赛道上比赛的演示。
让我们来谈谈这个话题,因为可编程的机器人。这是什么意思?这个机器人完成了传感器的系统,该系统可与计算机通过USB电缆进行编程,以简单的方式。以此为基础,我们采取的Arduino IDE开发环境和C ++语言。因此,进入门槛低,机器人可以做几乎每个人谁开始学习编程,或者已经有某种知识。如果我们将实现传感器和电机的工作情况已经存在的类库,我们可以得到一个在代码中我们喜欢的机器人说,他面临的障碍,这样的政党制度,我们是在它问他赶走后退,左转并且走得更远。或要求的程序来推动1米转30度向右,直行2米和执行一些动作。在此基础上,我们可以设定在一个更复杂的问题的机器人,获得满意的学习机器人编程的形式,或仅仅作为爱好。在提供同样的效果哇:)
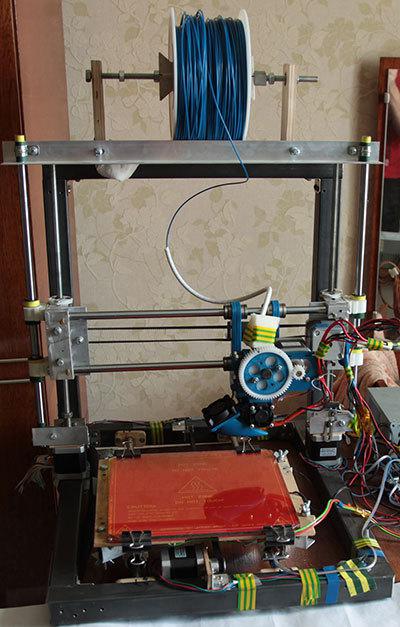
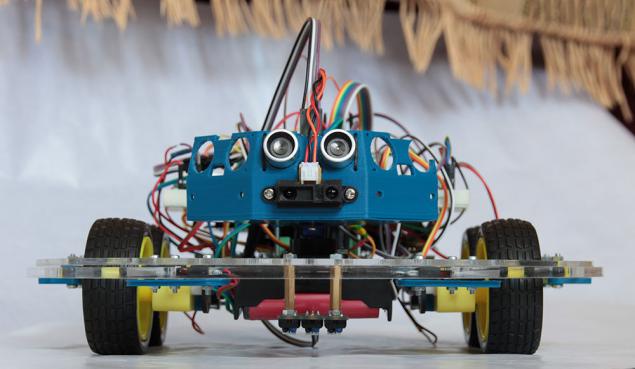
现在的机器人。由于以前的文章机器人重新建造。我的开发的底盘被考虑到前面的底盘的问题,新的具有良好的透气性和更容易匝。箱体板切割由有机玻璃的激光切割,其它细节被打印在三维打印机向它的设计。齿轮电机放的比例为1:120,它们提供更多的扭矩,在发动机转速较低时,该机器人是明显更容易展开。
新版本的主要特征是使用自己设计的圆形保险杠。这使得能够确定与每一侧以高精度的碰撞。到8微使其设计,你可以在照片中看到的。现在机器人可以驱动,即使没有雷达。
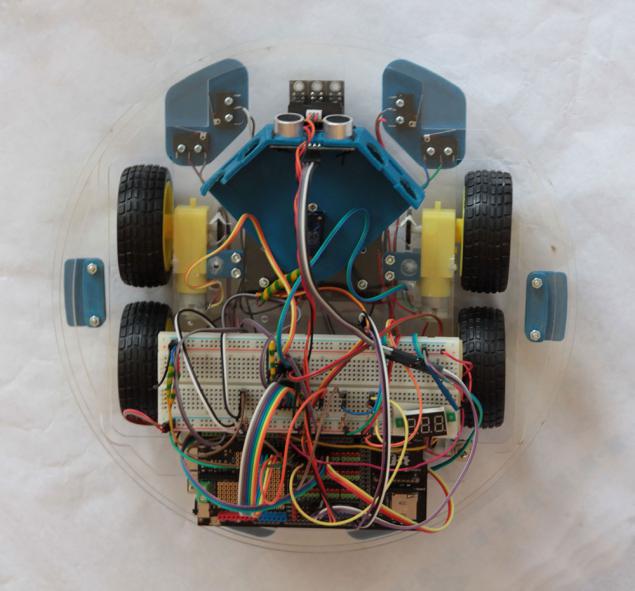
电子也被改变,关于Arduino的移动米加ADK因为不上的Arduino乌诺足够的输入/输出。
机器人的新版本已经通过了压力测试的房子在连续工作几个小时。新的传感器系统表明,该机器人可以在房间里安全航行,甚至在地板上的东西散落的电线堆。
这是什么意思?可以编程机器人的运动的不同的任务,诸如房间的弯路,在赛道上,与其他机器人的竞争,搜索标记等
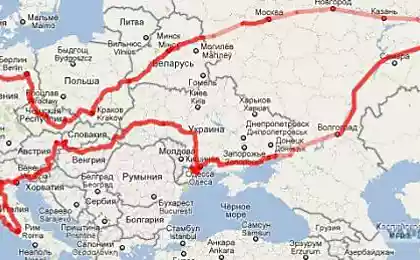
为了说明问题已经被选择,以驱动机器人的手写动作的算法沿着从任意的材料构成,以完成由白纸片表示的轨迹。下面你可以看到它的视频。
来浏览周围的轨道,以下传感器:超声波测距仪,红外线测距仪,保险杠,车轮编码器。基于这些数据,该算法生成一个路由。
终点是由传感器确定,我能对它进行配置,使大多数的平面公寓,如地毯,油毡他确定为黑色。因此,白皮书为白色。
在接下来的视频我说话,就像编程的机器人。
该项目是开放的SORCE这一切的根源,你可以下载并参与项目的开发。
还附图中的Corel用于激光切割和3d的文件进行打印。如果你没有使用这种设备,可以和我联系,你会准备这些细节和发送邮件。
地面(3-5毫米厚度),保险杠(厚5mm)的激光切割。
对于3D打印详细
来源为Arduino的。
理想情况下,我现在看到ROS(机器人作业系统)的基础上,该项目为开放式SORCE预算机器人编程机器人的未来,探讨如何简单的机器人Arduino的和复杂的。
关于ROS。它提供了编程机器人真正无限的可能性。我认为这是机器人技术的未来。目前有两个主要问题是缺乏根据的IT预算机器人和英文的所有相关文件。第一个问题是由这个机器人通过蓝牙,Wi-Fi或通过在Android上它可以与核心ROS(通过蓝牙连接到一台笔记本电脑与ROS已经尝试过)相关联的电话解决。第二,我不知道如何解决,慢慢学习辅导英语,但速度很慢。如果引起人们准备翻译成俄文会很感激,愿意承担这样的工作。
该项目的新闻组VKontakte等 - https://vk.com/club23358759
开发机器人 - https://vk.com/alekseyburkov
PS:记得你写的文章评论认为,这是对我很重要!
资料来源: habrahabr.ru/post/228549/