2412
Програмований робот Коричневий версія 0.4
 р.
р.Відкритий вихідний проект і демонстрація гонки на трасі.
Поговоримо про тему, як програмовані роботи. Що означає? Це повний робот з системою датчиків, які можна запрограмувати простим способом з комп'ютером через USB-кабель. Візьміть середовище розробки Arduino IDE та мову C++. Таким чином, початковий поріг низький і практично кожен, хто починає навчання програмування або вже має деякі знання, можуть зробити робототехніку. Якщо ми використовуємо готові бібліотеки, класи, які реалізують роботу з датчиками та двигунами, то ми отримуємо систему, наприклад, в програмному коді, робот каже нам, що він зіткнувся з перешкодою від такої та такої сторони, і ми інструктуємо її, щоб повернутися назад, повернути ліворуч і піти далі. Або в програмі ми попросимо вас їздити по 1 метру вперед, ввімкніть 30 градусів вправо, приводите безпосередньо ще 2 метри і виконуємо деякі дії. Виходячи з цього, ми можемо програмувати робот для більш складних завдань, отримувати задоволення у вигляді навчання, як програмувати роботу або просто як хобі. В даному випадку діє ефект кіптяви:
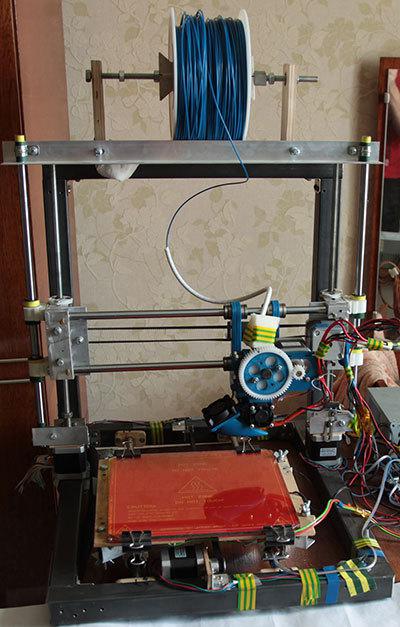
Тепер поговоримо про себе роботи. З попередньої статті робота була перебудована. Враховано дизайн шасі мого розвитку, враховано проблеми попереднього шасі, новий має хорошу прохідність і легше розгортати. Таблиці шасі вирізаються лазерним різким від Plexiglas, решта деталей друкуються на 3d принтері їх конструкції. Моторні коробки передач, встановлені співвідношенням 1: 120, вони дають більш крутний момент при низьких швидкостях, робот помітно полегшується поворот.
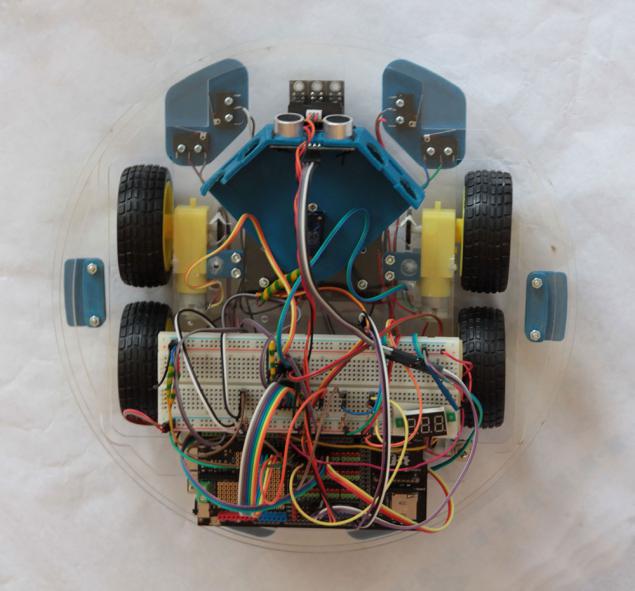
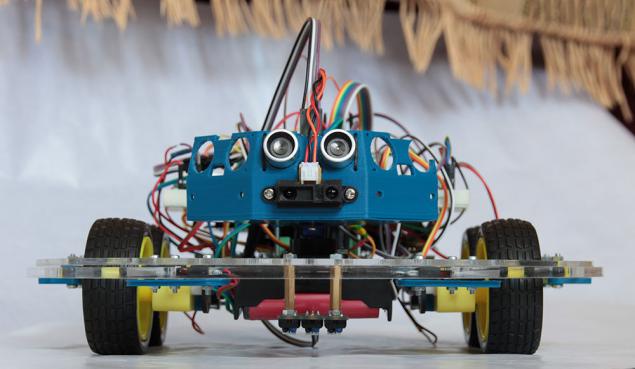
Головною особливістю нової версії є використання кругового бампера власного дизайну. Дозволяє визначити зіткнення з обох сторін з високою точністю. Виготовляється на основі 8 мікросвербіж, дизайн можна побачити на фото. Тепер робота може приїхати без розташування.
Також змінювалися електронні пристрої, що переключаються до Arduino Mega ADK, оскільки на Arduino Uno недостатньо вводів/виводів.
Нова версія робототехніки, що випробувано в домашніх умовах в безперервній експлуатації протягом декількох годин. Нова система датчика показала, що робот легко орієнтується в кімнаті навіть серед палітурених речей, проводів на підлозі.
Що означає? Ви можете запрограмувати робот для різних завдань водіння, наприклад: обходити приміщення, гонки уздовж доріжки, конкурувати з іншими роботами, пошук маркерів і т.д.
Для демонстрації завдання було обрано для приводу роботи з письмовим алгоритмом руху по трасі довільно побудовані з імпровізованих елементів до лінії обробки, зазначених білими аркушами паперу. Ви можете побачити її у відео нижче.
Навігацію маршруту використовуються такі датчики: ультразвуковий діапазонфіндер, інфрачервоний діапазонфіндер, бампер, кодери на колесах. На підставі даних з них алгоритм будує маршрут.
Фініш визначається сенсором лінії, я зумів регулювати його так, щоб більшість плоских поверхонь в квартирі, таких як килими, лінолеум, він визначає як чорний. Відповідно білий аркуш паперу як білий.
У наступному відео я збираюся говорити про те, як легко це запрограмувати роботу.
Проект відкриває всі джерела ви можете завантажити і взяти участь у розробці проекту.
Я також включає малюнки в ядро для лазерного різання та файлів для 3D-друку. Якщо ви не маєте доступу до такого обладнання, ви можете зв'язатися з нами і зробити ці частини для вас і відправити їх поштою.
База (3-5мм товста) і бампера (5мм товста) для лазерного різання.
3D друк деталей
Джерела для Arduino.
 р.
р.В ідеалі я бачу майбутнє цього проекту як відкритий робот з бюджетів сорбції для навчання, як програмувати роботи, так і прості роботи на arduino і складних роботах на основі ROS.
Про РОС. Це дає дійсно безмежну можливість програмі роботи. Я бачу це як майбутнє робототехніки. На даний момент існує дві основні проблеми – відсутність бюджетних робот для неї і всієї відповідної документації англійською мовою. Перша проблема вирішується цим роботом, через синот, Wi-Fi або через телефон Android, він може бути пов'язаний з ядром ROS (прочитано спробував використовувати синєт асоціюється з ноутбуком з ROS). Я не знаю, як вирішити другий, я повільно навчаюся підручників англійською мовою, але це дуже повільно. Якщо люди готові перевести в російську мову, я б дуже вдячний і готовий організувати таку роботу.
Група Vkontakte з новинами проекту - https:////vk.com/club23358759
Робот розробник - https://vk.com/alekseyburkov
PS: Пам'ятайте, що ви сказали в коментарі нижче важливо мені!
Джерело: habrahabr.ru/post/228549/






















Міжпланетна станція «Розетта»: перші дані про дослідження приходу Чурюмов-Герасіменко
Лінія «розумних» годинника Samsung Gear Live буде випущена на платформі Android Wear