2412
Robot programable Brownie versión 0.4

Proyecto de código abierto y una demostración de la carrera alrededor de la pista.
Vamos a hablar de este tema como robots programables. ¿Qué quiere decir esto? Este robot se acaba con un sistema de sensores que se pueden programar de manera sencilla con el ordenador mediante un cable USB. Como base se toma el entorno de desarrollo Arduino IDE y el lenguaje C ++. Así, la barrera de entrada es baja y la robótica puede hacer casi todo el mundo que empieza a aprender a programar o ya tiene algún tipo de conocimiento. Si aplicamos las clases de bibliotecas ya existentes que implementan el funcionamiento de los sensores y motores, se obtiene un sistema en el que en el código que nos gusta robot dice que se enfrentó a un obstáculo para un partido así, y estamos en ello le pido que conducir fuera hacia atrás, gire a la izquierda e ir más lejos. O pregunte el programa para impulsar 1 metro, gire 30 grados a la derecha, siga recto 2 metros y realizar alguna acción. Sobre esta base, podemos programar el robot en un problema más complejo, obtener satisfacción en la forma de aprendizaje de programación de robots, o simplemente como un hobby. Al mismo efecto wow :) proporcionado
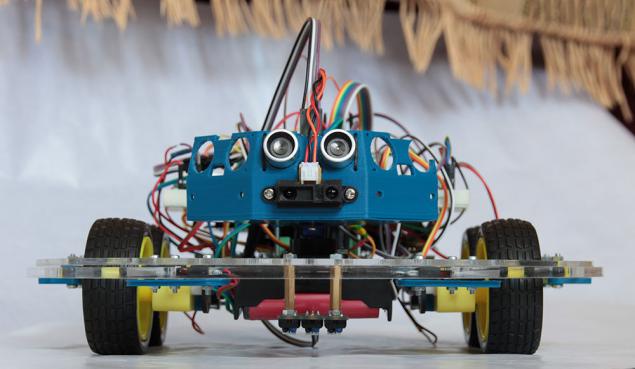
Ahora en el robot. Desde anterior robot artículo fue construido de nuevo. El chasis de mi desarrollo se han tenido en cuenta los problemas del chasis anterior, el nuevo tiene una buena permeabilidad y giros más fáciles. Chasis placa cortada por el corte por láser de plexiglás, los demás detalles se imprimen en la impresora 3D para su diseño. Motorreductores poner una proporción de 1: 120, que dan más torque a bajas velocidades del motor, el robot fue notablemente más fáciles de desplegar.
La característica principal de la nueva versión es el uso de un parachoques circular de su propio diseño. Se permite determinar la colisión con cualquier lado con alta precisión. Lo hizo a través de 8 microinterruptores diseño se puede ver en la foto. Ahora el robot puede conducir incluso sin radar.
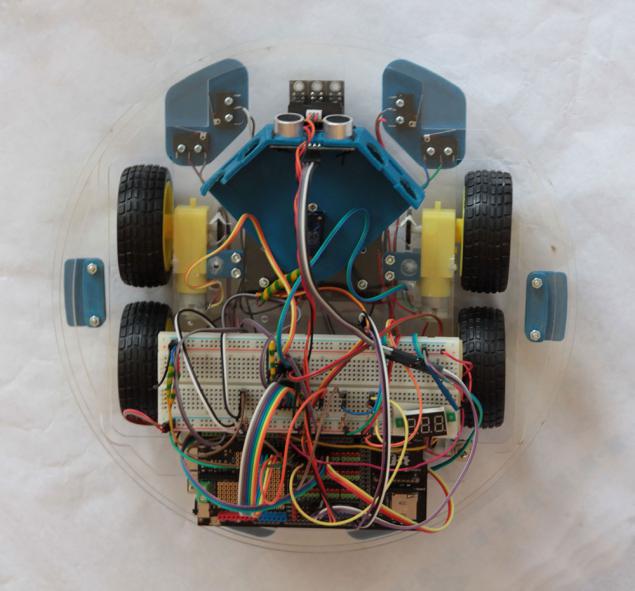
También Electrónica ha cambiado, se trasladó en Arduino Mega ADK porque no hay suficientes entradas / salidas de la Arduino UNO.
La nueva versión del robot ha pasado la casa de prueba de esfuerzo en la operación continua durante varias horas. El nuevo sistema de sensor mostró que el robot puede navegar con seguridad en la habitación, incluso entre un montón de cosas dispersas cables en el suelo.
¿Qué quiere decir esto? Usted puede programar el robot para diferentes tareas del movimiento, tales como el desvío de la habitación, en la pista de carreras, la competencia con otros robots, marcadores de búsqueda etc.
Para demostrar el problema ha sido seleccionado para conducir el robot para escribir un algoritmo de movimiento a lo largo de una construida arbitrariamente a partir de materiales a mano para terminar la pista indicada por hojas de papel blanco. A continuación se puede ver en el vídeo.
Para navegar alrededor de la pista, los siguientes sensores: Buscador de ultrasonidos gama, telémetros infrarrojos, pegatinas, codificadores sobre ruedas. Basándose en estos datos, el algoritmo construye una ruta.
La línea de meta está determinada por el sensor, que era capaz de configurarlo para que la mayoría de las superficies planas en el apartamento como alfombras, linóleo que él identifica como negro. En consecuencia, el papel blanco como blanco.
En el siguiente video hablo sólo como robot programado.
El proyecto es sorce abierto todas las fuentes se puede descargar y participar en el desarrollo del proyecto.
También los dibujos adjuntos en el corel para corte láser y archivos 3D para la impresión. Si usted no tiene acceso a estos equipos, puede ponerse en contacto conmigo va a preparar estos detalles y enviar correo.
tierra (5.3 mm de espesor) y el tope (5 mm de espesor) de corte por láser.
Detalles para la impresión 3d
Fuentes para Arduino.
Lo ideal es que ahora veo el futuro de este proyecto como sorce abierto robots de programación de robots presupuesto para explorar cómo los robots sencilla Arduino y complejo sobre la base de ROS (Robot Operating System).
En cuanto a ROS. Se da una posibilidad verdaderamente ilimitadas para la programación del robot. Veo esto es el futuro de la robótica. Por el momento hay dos problemas principales es la falta de robots presupuestarias con él y toda la documentación pertinente en Inglés. El primer problema se resuelve con este robot a través de bluetooth, wi-fi o por teléfono en Android que se puede asociar con el núcleo de ROS (ya tratado a través de bluetooth vinculado a un portátil con ROS). En segundo lugar no sé cómo resolver, lentamente aprender tutoriales en Inglés, pero es muy lento. Si causa gente dispuesta a traducir al ruso serían muy agradecidos, dispuestos a realizar esa labor.
Vkontakte Grupo con las noticias del proyecto - https://vk.com/club23358759
Robot desarrollador - https://vk.com/alekseyburkov
PD: Recuerde que su opinión está escrito en los comentarios a continuación el artículo, es importante para mí!
Fuente: habrahabr.ru/post/228549/






















Sonda interplanetaria Rosetta: los primeros datos para estudiar el cometa Churyumov-Gerasimenko
La gama de "inteligente" relojes Samsung Gear Live será lanzado en la plataforma Android de desgaste