1058
Робот адаптується до втрати кінцівок
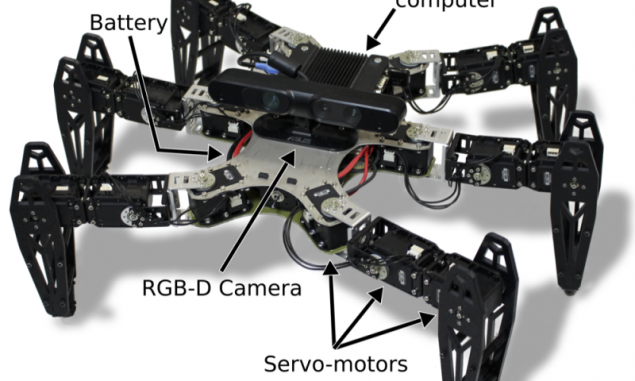
У журналі Nature опубліковано книгу «Роботи, які можуть адаптувати як тварини». Вона показує, як роботи можуть відновитися з травми менше 2 хвилин. Відео вище показує шість-легованих роботів, які адаптують і продовжують ходити навіть з двома зламаними ніжками. Алгоритм також застосовується до робо-hand.
Живі істоти мають сильну здатність адаптуватися до травми. Собака може втратити свою лапу, але через деякий час вона ще зможе грати з її власником. Розміщена щиколотка знайде спосіб збереження руху. Ці можливості будуть дуже корисними в роботі, які також можуть втратити частини своїх органів. Як кажуть дослідники, коли поранені тварини не починають вчитися з нуля. замість цього використовують інтуїцію. Вони вибирають кілька способів продовжити роботу, перевірити їх і вибрати правильний. Команда науковців створила роботи, які роблять те ж саме.
До роботи робота використовує комп'ютерне моделювання процесу курсу. Таким чином, докладна карта поведінки на основі нового алгоритму еволюції MAP-Elites. Карта містить погляди роботи про різні методи роботи та оцінку їх успіху. Hexapod отримує пошкоджені і намагається використовувати ці уявлення для контролю алгоритму навчання. Старі методи ходьба більше не працюють - карта виконана на шість робочих кінцівок. Експерименти проводяться для швидкого виявлення компенсаційної поведінки та оптимізації Bayesian. Новий алгоритм називається інтелектуальним випробуванням та помилкою.
Після травми робота дізнається. Він має розуміння попередніх поведінок, які можуть працювати, і він починає їх тестування. Але ці ідеї базуються на імітаційному роботі без пошкоджень. Для того, щоб вони працювали. Робот виконує експерименти. Якщо одна поведінка не працює, робот буде ліквідувати всю групу і спробувати щось інше. Наприклад, якщо рухи передніх ніг не допомагають, робот спробує перенести задні ноги. Згідно з результатами експериментів, найбільш важливою складовою є копіювання і робота з ним. Цікаво, що рухи гексапода в результаті починають нагадувати рухи ранної пасти.
Дослідження були вражені швидкістю навчання пошкоджених роботів. Займається менше двох хвилин, щоб адаптуватися, в відео цей процес займає 20-30 секунд. Іноді, в результаті адаптації, шестиступеневий робот починає рухатися трохи швидше, ніж раніше. Те ж алгоритм працює з багатьма іншими роботами. Наприклад, відео показує ручний контрольний тест, завдання якого було перевозити об'єкт на даній точці. Продемонстровано, що метод дозволяє адаптуватися до втрати двох кінцівок з шести і відбиття двох двигунів маніпулятора. Хексапод здатний регулювати до шести різних типів травм, робо-армів - 14.
Нова технологія може допомогти створити більш автономні та надійні роботи. Пошук і рятувальні операції не приділяють пильній уваги роботів, а помічникам особистого роботи продовжать бути корисними навіть при серйозних проблемах.
На основі Phys.org та університету Wyoming DOI: 10.1038/натура14422.
Джерело: geektimes.ru/post/251272/























Красиві старі картини. Справжня мода в картинах і це розкішна божевільність.
Найбільша панорамна фото - 365 gigaпікселів