1056
机器人适于肢体损失
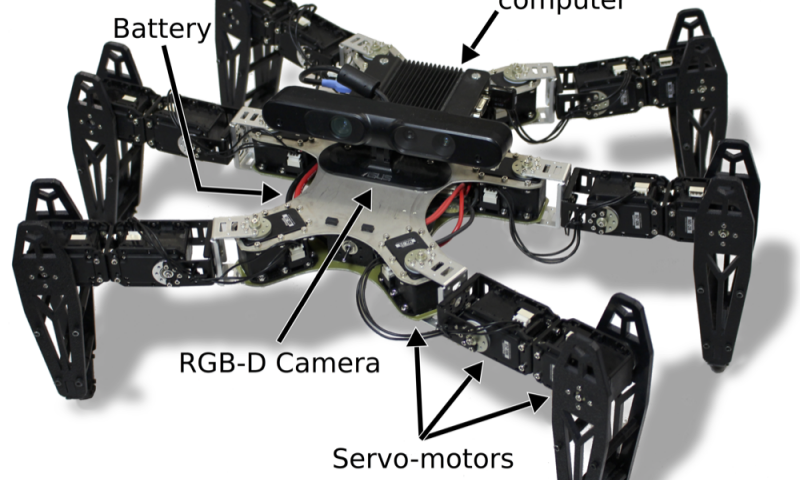
Nature杂志上发表的一篇文章“,能够适应动物»(机器人能够适应喜欢动物)的机器人。它显示了如何机器人可以在不到2分钟恢复伤病。上面的视频显示了六腿机器人适应,并继续走,即使有两个断脚。在开发的算法也可以适用于一个机械臂。
众生必须适应损伤能力强。狗可能会失去他的爪子,但一段时间后仍然能够与主人玩。张开脚踝人们找到一种方式继续下去。这些功能将在机器人,这也可能会失去他们的身体的一部分非常有用的。如何告诉研究人员,创伤动物没有从头开始的训练。相反,他们使用的直觉。他们挑了一些方法来继续工作,对其进行测试并选择一个合适的。科学家团队能够创造的机器人,大致做了同样的事情。
在此之前的机器人的操作使用计算机模拟的处理速度。由于编译行为基础上的新的进化算法MAP-精英的详细地图。该地图包含了他们成功的工作和评估的方法不同机器人的代表性。昆虫被损坏,并试图利用这些思想来控制学习算法。旧的方法不再工作距离 - 卡为六维修四肢。实验是在快速检测补偿行为和贝叶斯优化的进行。新算法称为“智能试错法»(智能试错)。
伤后机器人学。他以前的行为,可以工作的想法,他开始对它们进行测试。但这些想法是基于仿真机器人的无损伤。因此,我们必须找到一种方法对它们进行修改,以使他们的工作。该机器人进行实验。如果一个人不工作的行为,机器人将消除其整个集团,并尝试不同的东西。例如,如果移动前腿不工作,尝试将机器人搬回。根据实验的结果,最重要的部分是地图的准备和使用它。有趣的是,昆虫运动作为开端的结果类似于一只受伤的动物的运动。
研究人员袭击损坏的机器人学习速率。为了适应视频只需要不到两分钟,这个过程需要20-30秒。有时,为六腿机器人适应的结果开始移动比以前快一点。这个算法可以很好地处理各种其他的机器人。例如,视频显示其中已经输送至给定的点的对象的机器人手臂的测试对象。已经证明,该方法允许以适应两个六个腿的两个发动机的损失和破损机械臂。六足能适应六种不同类型的损伤,机器人手臂的 - 下14.
新技术可以帮助创造一个更加可靠和自主机器人。搜索和救援行动将不会与关注机器人和机器人个人助理关联将继续成为有用严重时甚至会出现故障。
据“材料 Phys.org 和的新闻网站怀俄明大学。 DOI:10.1038 / nature14422 。
来源: geektimes.ru/post/251272/