Жизнь — интересная!
Подписывайтесь на нашу группу в Telegram и Facebook, чтобы быть в сообществе единомышленников, находить вдохновение и не пропускать свежие и удивительные статьи с bashny.net.
1453
0.3
2014-08-04
Полёт к Луне с посадкой на лунной базе
Давненько у меня не было новых постов по Orbiter'у. Поэтому сегодня мы поговорим о штатном аппарате игры под названием Delta-glider, а также, взлетев с Земли, слетаем на лунную базу. Несмотря на фантастичность задания, оно должно быть достаточно любопытным — задача торможения и посадки на Луну не такая простая, как это может показаться. Дело в том, что у Луны нет атмосферы, поэтому тормозить придется двигателями.
Delta-glider
Этот корабль идёт в базовой поставке игры. Он обладает фантастическими параметрами:- Масса пустого: 11 тонн обычный, 13 тонн модификация с гиперзвуковыми прямоточными воздушно-реактивными двигателями. Примерно столько весит пустой МиГ-29.
- Масса топлива: 13 тонн.
- Длина: 17,76 м.
- Размах крыла: 17,86 м. Такие длина и размах крыла сравнимы со средними бомбардировщиками ВОВ (Do-17) или штурмовиком A-10.
- Тяга маршевых двигателей: 2*160 кН (чуть больше РД-0124)
- Удельный импульс маршевых двигателей: ~4000 с. Такими параметрами обладают ЯРД, не зря на модели аппарата у двигательного отсека значок радиационной опасности.
Также аппарат имеет подъемные двигатели, которые позволяют совершать вертикальные взлет и посадку, и крылья, позволяющие маневрировать в атмосфере. Сочетание этих свойств делает Дельта-глайдер отличным аппаратом для обучения и полетов для удовольствия.
Подготовка к полёту
Кроме самого Orbiter'а никаких аддонов не нужно.План полёта
Наша миссия будет разбита на простые этапы. Поэтому, с одной стороны, она будет очень неэффективной с точки зрения топлива (и мы включим режим «бесконечного топлива»). Также, она будет нереалистичной — реальным аппаратам траектории рассчитывают коллективы баллистиков, что делает полеты гораздо эффективней. Но, с другой стороны, отдельные этапы будут простыми и будут наглядно объяснять физику полёта. Наш план полёта будет состоять из следующих этапов:- Старт с Земли и выход на низкую круговую орбиту.
- Совмещение плоскостей орбит.
- Разгон к Луне.
- Выход на орбиту Луны.
- Совмещение плоскости орбиты с местом посадки.
- Торможение и посадка.
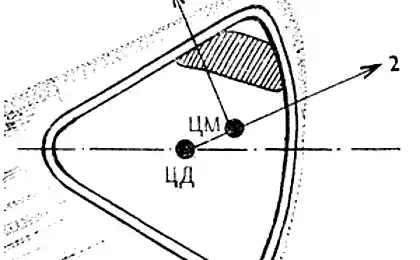
Используемые определения
Апоцентр — самая высокая точка орбиты. Для орбиты вокруг Земли также используется название «апогей».Перицентр — самая низкая точка орбиты. Для орбиты вокруг Земли также используется название «перигей».
Наклонение орбиты — угол между плоскостью орбиты и другой плоскостью (плоскостью, проходящей через экватор Земли или плоскостью орбиты другого тела)
Восходящий узел — точка, в которой орбита пересекает плоскость экватора Земли или плоскость орбиты другого тела, оказываясь «выше» неё. «Выше» и «ниже» определяются условными северным и южным полюсами.
Нисходящий узел — точка, в которой орбита пересекает плоскость экватора Земли или плоскость орбиты другого тела, оказываясь «ниже» неё. «Выше» и «ниже» определяются условными северным и южным полюсами.
Например, если мы говорим об орбите Луны вокруг Земли, картинка будет следующей:
Этап 1. Старт с Земли и выход на низкую круговую орбиту
После запуска игры первым делом перейдем в раздел «Параметры» и выставим режим бесконечного топлива:Кроме очевидного бонуса допустимых ошибок на полёт, этот режим даст нам постоянное ускорение корабля, что будет очень удобно на посадке.
Затем запустим сценарий «DG-S ready for takeoff»:
DG-S — это версия с воздушно-реактивными двигателями, нам они не нужны, но этот сценарий удобен тем, что мы уже стоим на взлетно-посадочной полосе.
Переключаемся на вид из кабины нажатием F1. Нажимая F8 последовательно переключаем кабину в режим «стеклянного кокпита».
Оба многофункциональных дисплея стоит переключить на что-то более удобное, нежели посадочные индикаторы и карта. Переключим левый MFD в режим «Поверхность» нажав Левый Shift — F1, Левый Shift — S. Правый МФД переключим в режим «Орбита» — Правый Shift — F1, Правый Shift — O. Проверим, чтобы орбита корабля не проецировалась на эклиптику (Нужный режим Proj: SHP, кнопка PRJ на МФД), а высота орбиты отсчитывалась от поверхности, а не центра Земли (Нужный режим — небольшие значения ApA и PeA — высоты перицентра и апоцентра, кнопка DST на МФД). Правильный результат будет выглядеть так:
Для управления маневрами корабля используется цифровая клавиатура. В начале сценария двигатели ориентации выключены, и кнопки цифровой клавиатуры управляют только аэродинамическими поверхностями — элеронами и рулями направления. Перед взлетом установим триммер руля высоты до упора вверх, нажав и удерживая Delete над блоком курсорных клавиш. Запускаем маршевый двигатель и фиксируем его, нажав Num+ и, не отпуская, Ctrl. При полностью поднятом триммере Дельта-глайдер взлетит самостоятельно.
После взлета убираем шасси (G) и начинаем разворот на азимут 90°. Почему 90°? В этом случае мы будем разгоняться в направлении вращения Земли, и наклонение нашей орбиты будет равно широте места старта (~30° для мыса Канаверал, откуда мы взлетели). После разворота устанавливаем угол тангажа 30°, манипулируя триммером (Insert — вниз, Delete — вверх).
С ростом высоты воздух будет становиться реже, и триммеров станет недостаточно для поддержания постоянного тангажа 30°. Включим двигатели ориентации, нажав кнопку ROT слева-сверху и поддерживая угол тангажа в режиме стабилизации KillRot (Num 5). Но на высоте ~20 км этот режим перестанет нормально справляться. Можно помогать триммерам активным управлением (удобнее, если у вас есть джойстик). Но самый изящный вариант — это поворот маршевых двигателей. Дело в том, что у Дельта-глайдера, как и у многих современных ракет, маршевые двигатели могут поворачиваться на карданном подвесе, создавая управляющий момент. Для того, чтобы изменить угол поворота двигателей, переключаем кокпит в режим 2D (нажимая F8). Управление вертикальным углом двигателей слева-сверху, нажатие на желтые точки изменяет положение обоих двигателей сразу:
Выдерживая тангаж 30° продолжаем разгон. Выше 50 км можно оставить только режим KillRot, установив угол двигателей 0° кнопкой Center под клавишами управления вертикальным углом двигателей, и переключиться в более удобный режим «стеклянного кокпита». На высоте ~70 км при выдерживании угла тангажа 30° будет участок небольшого снижения, не нужно этого пугаться. Когда аппарат поднимается до 70 км, скорость становится недостаточной для создания сколько-нибудь значимой подъемной силы. Но за время подъема по инерции и небольшого спуска скорости снова начинает хватать на создание подъемной силы крыльями, и начинается второй цикл подъема. Можно наглядно посмотреть на этот процесс, включив отображение сил, действующих на аппарат (Ctrl — F9, во вкладке Forces поставить галочки).
Продолжаем разгон до тех пор, пока на орбитальном индикаторе высота апоцентра не составит 200 км. По достижении этого параметра выключаем двигатели нажатием Num *.
Переводим индикатор на лобовом стекле в орбитальный режим (кнопка H) и занимаем положение по вектору орбитальной скорости (носом вперед) — кнопка [ или PROGRD внизу.
Недалеко от точки апоцентра (прозрачный кружок на МФД «Орбита») включаем двигатели снова. Разгоняемся до примерно круговой орбиты, высота перицентра не должна быть ниже 150 км. Результат:
Переведем аппарат в орбитальную конфигурацию. Дело в том, что тормозные двигатели расположены в носке крыла и при старте прикрыты аэродинамическими обтекателями. Их можно было открыть и на старте — модели повреждений в Orbiter нет, но так интереснее. Итак, открываем меню «управляющие элементы» (Ctrl — Пробел) и нажимаем кнопку Retro Doors — Open.
Теперь мы можем не только разгоняться по Num+ но и тормозить по Num-. Тормозные двигатели менее мощные, чем маршевые, но ими удобно пользоваться для выполнения точных маневров.
Итак, мы на низкой орбите Земли. Эта орбита устойчивая, поэтому рекомендую сохраниться, нажав Ctrl-S. Сохранения лежат в папке Quicksave сценариев:
Этап 2. Совмещение плоскостей орбит
Для того, чтобы узнать разницу наклонений орбит, переключаем правый МФД в режим «Совмещение плоскостей орбит» — Правый Shift -F1, Правый Shift — A. Выбираем Луну целью — Правый Shift — T, в меню выбрать Celestial bodies — Moon:Угол в 47° наглядно демонстрирует поговорку «сила есть — ума не надо». В реальной жизни аппараты к Луне стараются пускать в так называемые стартовые окна, когда угол между плоскостями будет минимальный. Окно к Луне открывается раз в лунный месяц. К тому же команда баллистиков может рассчитать такое стартовое окно, что угол между плоскостями орбит красиво превратится в наклонение орбиты аппарата вокруг Луны. Мы же пользуемся достаточно ограниченными инструментами и, к тому же, хотим отправиться к Луне сейчас же, без ожидания. Поэтому необходимо совместить плоскости орбит, чтобы мы могли начать разгон к Луне из любой точки своей орбиты.
Для совмещения плоскостей орбит мы должны разгоняться «вверх» на нисходящем узле и «вниз» на восходящем. Ближайший узел нисходящий (DN — Descending node), поэтому займем положение по нормали к плоскости орбиты. В этом нам поможет автоматическая ориентация. Кнопка ; клавиатуры или кнопка NML+ на экране внизу — это автоматическое занятие положения «вверх» перпендикулярно плоскости орбиты, ', она же э, или NML- на экране — вниз.
В районе узла начинаем разгон. Такой большой угол означает, что потребуется несколько маневров.
После первого маневра угол уменьшился в два раза. Повторяем на восходящем узле. Для того, чтобы не было скучно ожидать узла, воспользуйтесь ускорением времени — кнопка T ускоряет время в 10 раз, R — замедляет в 10 раз. Не злоупотребляйте ускорением, при включенном режиме автоматической ориентации корабль может закувыркаться на ускорении больше 1000х.
После второго или третьего маневра относительный угол будет стремиться к 0:
Этап завершен, не забудьте сохраниться.
Этап 3. Разгон к Луне
Для разгона к Луне нам потребуется МФД «Переход». Включим его справа — Правый Shift — F1, Правый Shift — X. Выберем целью Луну (Правый Shift — T, Celestial bodies — Moon). Включим режим планирования маневра — кнопка HTO на МФД. HTO — это Hohmann Transfer Orbit — гомановская траектория, способ перемещаться между орбитами с минимумом затрат горючего. Появится пунктирный радиус. Этот радиус обозначает точку маневра. Мы можем перемещать его кнопками Правый Shift — < и >. Также мы можем регулировать расчетный импульс кнопками Правый Shift — + и -.Совмещаем точку нашего ожидаемого положения с точкой ожидаемого положения Луны.
Параметр DTe — это время до начала маневра. DV — необходимое приращение скорости. Нам стоит начать разгон за некоторое время до достижения точки маневра, чтобы хотя бы частично скомпенсировать боковую составляющую разгона по вектору орбитальной скорости:
Не забудьте заранее занять положение по вектору орбитальной скорости. Разгоняемся:
Очень важно запомнить скорость нашего разгона — 11,8 м/с. Эта та скорость, с которой мы будем тормозить у Луны, и она пригодится нам для расчетов.
Разгон закончен. Для перелета Земля-Луна такая точность вполне достаточна, дополнительная коррекция не требуется. Не забудьте сохраниться.
Этап 4. Выход на орбиту Луны
Готовимся к перелету к Луне. Стабилизируем аппарат режимом KillRot. Он выключится автоматически, и мы сможем спокойно ускорять время.Чтобы не было скучно, включаем музыку:
В процессе перелета к Луне рекомендую обратить внимание на взаимное положение нас и Луны. Сначала мы её обгоним, но ближе к апоцентру наша скорость станет практически незаметной, и уже Луна догонит нас. Всё по второму закону Кеплера. При подлете к Луне обратите внимание на изменение нашей орбиты — Луна находится сзади нас и тормозит наше движение вперед своей гравитацией.
Когда расстояние до Луны сократится, стоит проверить нашу орбиту — не прицелились ли мы слишком точно и не врежемся ли в Луну. Переключим правый МФД в режим «Орбита» (Правый Shift — F1, Правый Shift — O). Необходимо убедиться, что МФД стоит в режиме орбиты вокруг Луны. Если МФД находится в режиме орбиты вокруг Земли или Солнца, необходимо вручную переключить его в режим орбиты вокруг Луны нажатием Правый Shift — R, в меню выбрать Moon. При необходимости, нажатием кнопки HUD на МФД перевести индикатор на лобовом стекле в режим Orbit Moon. Необходимо подождать до тех пор, пока гравитационное влияние Луны не станет подавляющим — индикатор G внизу МФД не меньше 0,9-0,95. Иначе влияние Земли сильно исказит конечную орбиту. Итак, выясняется, что мы прицелились слишком точно и врежемся в Луну, если ничего не будем делать:
Необходимо произвести маневр коррекции траектории. Для этого поворачиваем корабль на 90° вправо от направления движения (в интерфейсе есть угломерные инструменты). Почему вправо? Маркер направления нашего движения находится справа от центра Луны, так нам придется меньше маневрировать. Но при желании можно смещаться влево, вверх или вниз. Автопилота для этого режима нет, надо будет удерживать курс 90° вправо вручную. Начинаем маневр:
Когда высота перицентра составит 40-80 км, заканчиваем маневр.
Незадолго до перицентра занимаем положение против вектора орбитальной скорости (кормой вперед) и тормозим, переходя на круговую орбиту:
Отлично, мы на низкой круговой орбите вокруг Луны. Не забудьте сохраниться.
Этап 5. Совмещение плоскости орбиты с местом посадки
Включаем режим карты на правом МФД (Правый Shift — F1, Правый Shift — M). Выбираем лунную базу «Брайтон Бич» в качестве цели (Правый Shift — T, в меню выбрать Spaceports — Brighton Beach):Зеленая линия — наша траектория. Нда, так мы на Брайтон Бич никак не попадем. Надо менять наклонение орбиты, чтобы пролететь над базой. Для этого занимаем положение NML+ или NML- по нормали к вектору орбитальной скорости вверх или вниз (для орбиты с почти нулевым наклонением это неважно) и изменяем наклонение орбиты до тех пор, пока зеленая нить траектории не пройдет над базой. Изменять наклонение орбиты лучше не в любой точке, а в районе 90° широты слева или справа от базы. Одна клетка на карте — это 30° широты и долготы.
Результат маневра:
К сожалению, автоматика не успевала удерживать корабль строго перпендикулярно вектору орбитальной скорости, и у нас испортилась орбита. Нужно будет переключиться в МФД «Орбита» и вернуться на круговую орбиту. Потратим ещё один виток на две задачи:
- Убедиться что мы точно прицелились.
- Снизить орбиту до 10-15 км.
После этого не забудьте сохраниться. Начинается самое интересное — мы идём на посадку.
Этап 6. Торможение и точная посадка
Кстати, фантастическая база «Брайтон Бич», судя по координатам, находится в южной части Залива Радуги:Недалеко к югу сел «Луноход-1», а в 400 км к востоку — китайский «Нефритовый заяц».
Кстати, при желании можно включить режим отображения меток поверхности (Ctrl — F9, вкладка Planetarium — Surface) и потренироваться в селенографии:
В чем сложность посадки на небесное тело без атмосферы? Нет атмосферы, чтобы об нее тормозить, нам не помогут крылья и парашюты. Нужно погасить полтора километра в секунду орбитальной скорости и не упасть при этом в сотнях километров от цели. Если мы начинаем тормозить, то наш перицентр оказывается под поверхностью, и надо парировать падение, одновременно замедляя скорость, чтобы в итоге перейти в висение недалеко от цели. В реальных полётах большей частью маневра управлял компьютер, астронавты на «Аполлонах» вмешивались в управление уже на конечном участке полёта. А у нас бедность вычислительных мощностей компенсируется бесконечным горючим. Но без математики все равно никуда. Нам надо найти расстояние, с которого начать торможение, чтобы оказаться в районе базы. Ускорение и масса у нас, хвала бесконечному топливу, постоянные, поэтому хватит школьных формул:
Сколько времени мы будем тормозить? Начальная скорость известна — 1658 м/с. Конечная — 0. Ускорение мы запомнили с предыдущих этапов — 11,8 м/с. V=V0-a*t, следовательно t= (V-V0)/a=(1658-0)/11,8=140 секунд.
На каком расстоянии нужно начать торможение? S=V0*t-(a*t2)/2=1658*140-(11,8*140*140)/2=232120-115640=116480 м.
Мы будем тормозить кормой вперед, поэтому будет удобнее перелететь базу. Возьмем запас в 10% и начнем торможение за 106 км от базы.
Нам необходимо занять правильное положение для торможения — против вектора орбитальной скорости, «брюхом» к Луне. Для этого включаем режим «уровень горизонта» — L или кнопка HORZ LVL внизу экрана и поворачиваем корабль кормой вперед вручную:
Рекомендую сохраниться километров за 500 от базы.
За 106 км начинаем торможение. После того, как станет заметной вертикальная скорость, начнем её парировать подъемными двигателями (Num 0 — увеличить тягу, Num . — уменьшить тягу). Не допускайте большой вертикальной скорости и большого вертикального ускорения!
Затормозили. Выключаем маршевые двигатели, продолжаем плавно снижаться на подъемных двигателях.
Внизу уже видна база. Целимся маркером направления движения на неё, постепенно снижаем поступательную и вертикальную скорости и выпускаем шасси:
Главное — двигаться плавно, не делать резких движений. Двигатели ориентации можно переключить в режим смещения (Num /) для точного маневрирования.

База постепенно проявляется. Ряд белых полос — это не взлетно-посадочная полоса, а монорельс, туда садиться не надо. Наша цель — посадочные площадки, стоящие «ромашкой» вокруг главного здания:
Осталось совсем чуть-чуть. Обратите внимание на то, что скорость почти погашена.
Можно переключиться на внешний вид по F1, чтобы лучше контролировать процесс посадки.
Есть посадка!
Рекомендую сохранить сценарий — потом может захотеться слетать, например, к Марсу, а с Луны взлёт и выход на орбиту проще.
Заключение
Не знаю, доживем ли мы до настоящей лунной базы, но такой виртуальный полёт — интересное приключение. И познавательное.Если хочется что-то изучить глубже, есть переведенный на русский язык мануал. Ну и другие посты серии Orbiter.
Источник: habrahabr.ru/post/231991/
Портал БАШНЯ. Копирование, Перепечатка возможна при указании активной ссылки на данную страницу.