Жизнь — интересная!
Подписывайтесь на нашу группу в Telegram и Facebook, чтобы быть в сообществе единомышленников, находить вдохновение и не пропускать свежие и удивительные статьи с bashny.net.
1400
0.3
2015-01-26
Перелет Марс-Земля: баллистические хитрости и атмосферный сёрфинг

С Земли на Марс мы уже в Orbiter'е летали, надо бы и обратно вернуться. А в качестве усложнения задачи мы попробуем вернуться назад побыстрее и используем атмосферу Земли для точной посадки на мысе Канаверал на полную катушку.
План полёта
Для удобства разобьем наш полёт на следующие этапы:- Старт с Марса
- Разгон с орбиты Марса
- Маневр для перехвата Земли
- Совмещение плоскостей орбит и промежуточные коррекции
- Коридор входа, аэродинамическое торможение об атмосферу Земли и точная посадка
Подготовка к полёту
Кроме Orbiter'а нам потребуется только один аддон — AerobrakeMFD. Для вашего удобства я выложил на Google docs сохранения этапов полёта. Если вы хотите проделать только какую-то часть полёта — скачайте архив и распакуйте в папку Scenarios Орбитера.Предполагается, что вы знакомы с космической баллистикой, симулятором Orbiter, и, как минимум, читали серию публикаций о полётах. Если нет — прочитайте хотя бы публикацию о перелете Земля — Марс. Базовая терминология и горячие клавиши здесь объясняться не будут.
Этап 1. Старт с Марса
Перед запуском сценария перейдём в настройки. Включим режим бесконечного топлива и выключим симуляцию повреждений. Последнее необходимо потому, что атмосфера Земли очень плотная, одно неосторожное движение, и у нас отвалятся элероны. Впрочем, если хотите, можете добавить адреналина, включив симуляцию повреждений.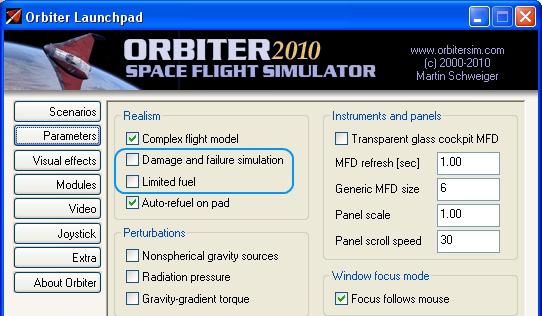
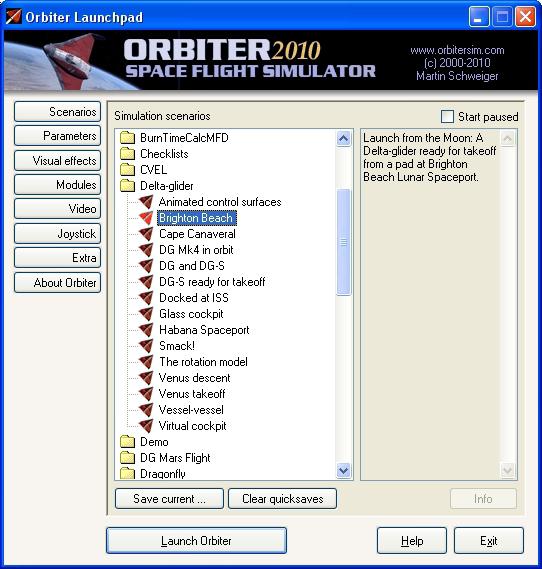
Для старта выберем сценарий из базовой поставки: Delta-glider — Brighton Beach:
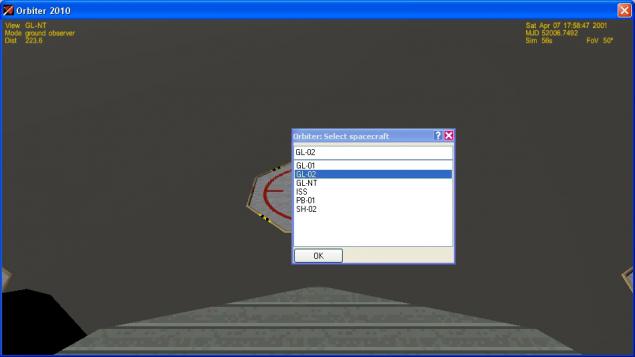
После запуска мы оказываемся на Луне. Так и должно быть. Нажав F3, переключимся на другой корабль, который стоит на базе Olympus на Марсе. Его бортовой номер GL-02:
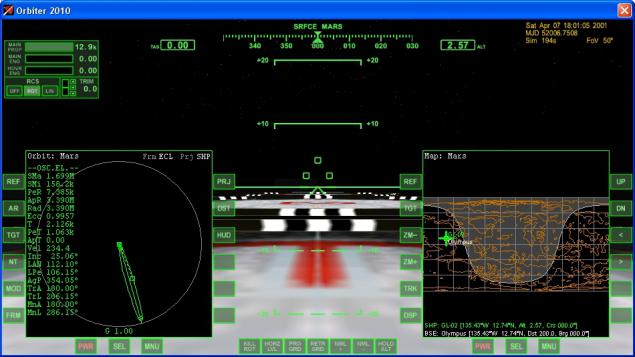
Всё, мы на Марсе:
«Проверить давление гидравлических систем — выполнено. Проверить показания систем контроля маршевого реактора — выполнено. Запустить космический эмбиент — выполнено. Карта предстартового контроля выполнена, к взлету готов».
Низкая гравитация Марса позволяет без проблем стартовать вертикально на подъемных двигателях. Включаем автоматическое поддержание уровня горизонта (L) и переводим подъемные двигатели на максимальную тягу. После взлёта убираем шасси, разворачиваемся на курс 90° и начинаем разгон:

В процессе разгона сохраняем режим ориентации по уровню горизонта и плавно прибираем тягу подъемных двигателей. Когда высота апоцентра составит ~100 км, выключаем маршевый двигатель.

В районе апоцентра снова включаем маршевый двигатель и выходим на круговую орбиту вокруг Марса:

На высоте 100 км ещё есть какие-то остатки атмосферы, но это нам не страшно — на этой орбите мы будем не больше пары витков. Этап 1 закончен. Сохранение этого момента — файл «01 Низкая марсианская орбита.scn»
Этап 2. Разгон с орбиты Марса
Поскольку Марс находится дальше от Солнца, чем Земля, нужно тормозить, чтобы выйти на курс, пересекающийся с Землей. Поэтому маневр по сходу с орбиты Марса лучше выполнять на дневной стороне орбиты, чтобы вторая космическая скорость для Марса вычиталась из его орбитальной скорости: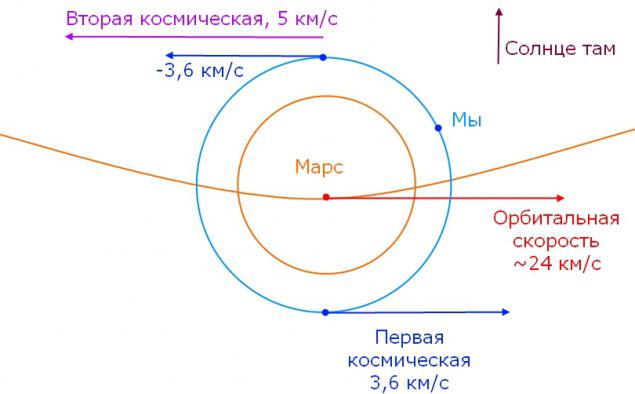
Подготовим МФД к маневру и начнем разгон согласно показаниям МФД «Переход»:

Для перехвата Земли нам потребуется выполнить сложный маневр, поэтому на данном этапе прекратим разгон, когда МФД «Орбита» покажет, что мы достигли второй космической и покидаем орбиту Марса:

Этап 2 закончен, сохранение — «02 Разгон с орбиты Марса.scn»
Этап 3. Маневр для перехвата Земли
Ускоряем время до тех пор, пока мы не окажемся вне гравитационного влияния Марса:

Планируем маневр для перехвата Земли в МФД «Переход»:

Предлагаемое решение рабочее и экономное, и вы вполне можете полететь по этой траектории. Но перелет займет где-то девять месяцев (посмотрите на текущее положение Земли и положение в точке пересечения — Земля пройдёт примерно 3/4 орбиты). Это долго, нельзя ли как-нибудь ускорить перелёт? Да, можно долететь практически в два раза быстрее. Для начала, выполним маневр торможения согласно нашему первоначальному плану:

Промежуточное сохранение — «03a Гоманов маневр.scn»
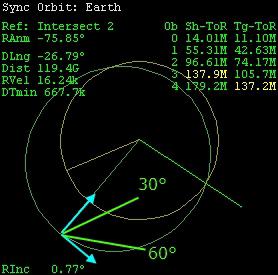
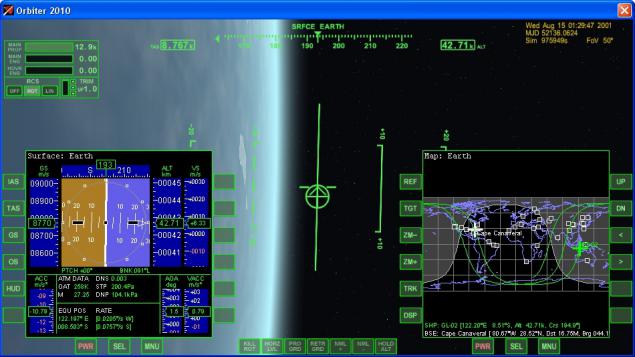
Посмотрите на левый МФД «Синхронизация орбит». Нажатием кнопки MOD на МФД я выбрал не дальнюю точку пересечения нашей орбиты и Земли, а ближнюю. Мы видим, что мы там будем через 14 мегасекунд, а Земля — через 11. То есть, в этой точке она нас обгонит. Значит, нам надо разгоняться, чтобы оказаться в этой точке одновременно с ней. Но каким курсом? Давайте подумаем. Если мы начнем разгоняться по вектору орбитальной скорости, то вернемся к ситуации на прошлом шаге, это не имеет смысла. Если мы будем разгоняться по направлению на Солнце, это тоже не будет иметь смысла, потому что точка пересечения будет смещаться влево, и нам надо будет очень сильно разогнаться, чтобы успеть перехватить Землю буквально по прямой на Солнце. Значит, нам надо разгоняться где-то в диапазоне 30-60° от направления на Солнце:
Попробуем разгон курсом 45° от прямой на Солнце, т.е. относительно вектора орбитальной скорости 315°:

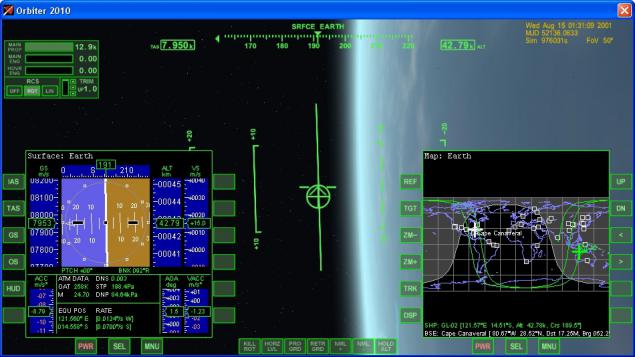
Разница времени заметно падает, но сама точка уходит по орбите вправо. Значит, нужно разгоняться «левее». Ориентируясь на параметр Tg-ToR (через сколько секунд Земля окажется в выбранной точке) и визуально на движения точки на МФД маневрируем в диапазоне курсов 290°-310° пока показатель DTmin не уменьшится до минимума:

Обратите внимание на орбиту. Мы разогнались так, будто бы возвращаемся не от Марса, а от Юпитера. Это очень неэффективно с точки зрения топлива, но зато мы будем на Земле меньше чем через 4 месяца. Этап 3 закончен, сохранение — «03b Изменение орбиты.scn»
Этап 4. Совмещение плоскостей орбит и промежуточные коррекции
Проверим угол между плоскостями наших орбит:
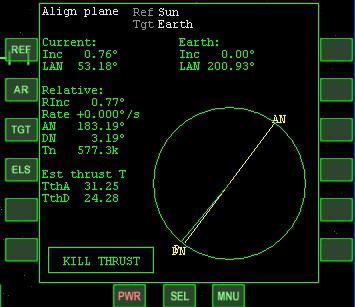
Нам не повезло, мы недавно миновали узел, и, чтобы точно совместить плоскости орбит, нам понадобится два маневра. Но это и к лучшему, здесь есть чему поучиться. Во-первых, раз нам не попадется узел до точки встречи с Землей, необходимо его туда переместить. Начинаем обычный маневр совмещения плоскостей орбит. Мы недалеко от нисходящего узла, поэтому будем разгоняться «вверх». Обратите внимание, что линия узлов начнет смещаться. Когда нисходящий узел займет место между нашим текущим положением и точкой встречи с Землей, прекратим маневр:

Отлично, теперь ускорим время до нисходящего узла и точно совместим плоскости орбит уже там:

После точного совмещения плоскостей орбит проведем коррекцию орбиты для точной встречи с Землей. Заняв положение по вектору орбитальной скорости, будем давать маневровые импульсы вперед/назад и влево/вправо. В какую сторону DTmin уменьшается, туда и даем импульс:

Отлично, коррекция произведена. За 5 мегасегунд до встречи коррекцию проводить нет смысла (параметры не успеют «испортиться»), повторим её за 2,5 и 1 мегасекунду до точки встречи:

Этап 4 закончен, сохранение — «04 Одна мегасекунда до Земли.scn»
Этап 5. Коридор входа и аэродинамическое торможение об атмосферу Земли
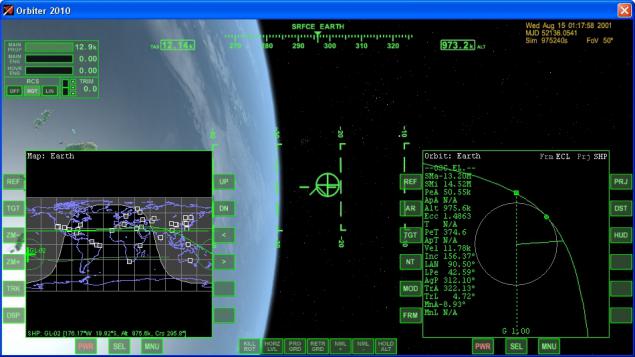
Проматываем время до тех пор, пока гравитационное влияние Земли не станет доминирующим:
Земля повернута к нам ночной стороной, это удобно. Наша задача — провести маневр так, чтобы перицентр орбиты стал бы равен 50 км, а вектор орбитальной скорости был направлен на дневную сторону. В этом случае мы будем комфортно тормозить на дневной стороне Земли:

Промежуточное сохранение «05a Коридор входа.scn».
Перед входом в атмосферу выставим триммер руля высоты максимально вверх и займем положение с углом крена 90°. План нашего торможения следующий. Мы займем высоту 40-50 км и будем гасить скорость, одновременно наводясь на мыс Канаверал. Когда наша скорость станет меньше орбитальной, мы вынырнем из атмосферы и войдем в неё снова уже в районе цели.
900 км, Земля уже близко:
Промежуточное сохранение «05b Девятьсот километров.scn»
В районе перицентра маневрируем креном — гасим одновременно вертикальную скорость и вертикальное ускорение:

С точки зрения физики получилась забавная ситуация. Мы попали в зону устойчивого торможения. Здесь просто находиться и очень удобно тормозить. Но если мы по неосторожности допустим большую вертикальную скорость, то либо вылетим из атмосферы, как плоский камень из воды, либо врежемся в землю на огромной скорости. Интересное ощущение, этакий космический сёрфинг…
Ни в коем случае не выпускайте аэродинамические тормоза, вы с большой вероятностью потеряете управление. Контролируем вертикальную скорость и ускорение, не забываем поглядывать на карту справа — меняется наклонение орбиты, нам надо наводиться на мыс Канаверал:

Корабль идёт сквозь атмосферу, как нож сквозь масло. Комфортнейшие условия торможения, чуть больше одного «же». В реальности таких аппаратов человечество не строило. Корабль переходит фактически на полярную орбиту, и первый виток оказывается недалеко от Мыса (да, иногда его зовут просто Мыс, с большой буквы). Надо быть внимательными, мы почти потеряли орбитальную скорость, и нельзя допустить, чтобы траектория ушла далеко в сторону:
Когда траектория уходит в сторону, резко переворачиваемся на другой бок и быстро минимизируем вертикальную скорость:
Когда скорость падает ниже орбитальной, на карте орбита разрывается на части. После того, как мы начнём «не долетать» до цели, быстро поворачиваемся на нулевой угол тангажа — пора бежать из атмосферы!

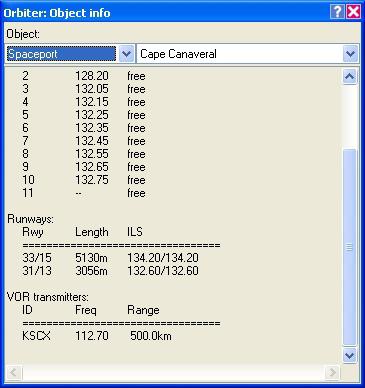
Атмосфера позади, но скорость ниже первой космической, и мы превратились в баллистическую ракету, или, точнее, бомбардировщик Зенгера. Готовимся к финальному участку посадки — переведем бортовые радиоприемники на частоты ILS мыса Канаверал. Частоты ILS доступны по Ctrl-I, это 134.20 и 132.60 МГц:
Промежуточное сохранение «05c После первого торможения.scn»
Выставляем их на МФД (SL-/SL+ выбирает канал, <</>> настраивает целую часть, </> — дробную):

Снова граница атмосферы. Главное — гасить вертикальную скорость и не допускать отклонений траектории от цели по МФД «Аэроторможение»:

Ещё один отскок от атмосферы:

Снова начинаем снижаться:

Приближаемся к цели. Выпускаем аэродинамические тормоза (Ctrl-B) и готовимся к активным маневрам:

До цели совсем немного, и скорость падает. Поддерживаем небольшую скорость снижения, чтобы тормозить по возможности плавно:

Вышли в район цели:

Перелетели цель, это нормально. Убираем аэродинамические тормоза и активно разворачиваемся для захода на посадку:

Развернулись, включаем ILS (МФД «Индикатор горизонтальной ситуации» Shift — H). К сожалению, ILS работает на крайне малом расстоянии, пока что просто пытаемся выйти в район ВПП:

Курсо-глиссадная система работает абсолютно также, как и в авиации, от пилота требуется управлять кораблём так, чтобы поддерживать вертикальный и горизонтальный индикаторы в центральном положении:

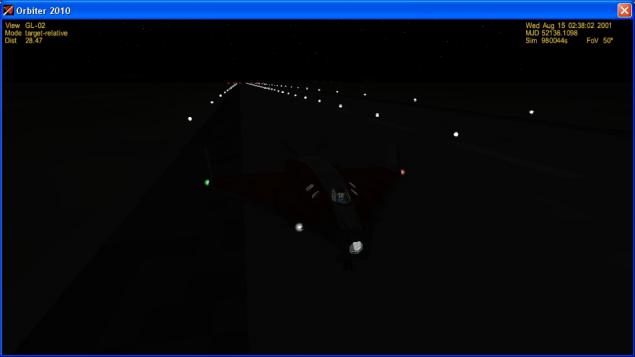
Когда ВПП видна (ночь, но погода хорошая), заходим на посадку, ориентируясь на ВПП визуально и по курсо-глиссадной системе. Стараемся поймать глиссаду. Это сложно, при необходимости выпускайте аэродинамические тормоза или давайте импульс двигателями для разгона.

После касания полосы тормозим (тормоз левого колеса — , (запятая), тормоз правого — . (точка)). Есть посадка!
Заключение
В качестве КДПВ использовано фото из орбитальной галереи Александра Самокутяева.Переведенный на русский язык мануал Orbiter'а.
Вся серия моих публикаций про полёты в Orbiter.
Источник: geektimes.ru/post/244790/
Портал БАШНЯ. Копирование, Перепечатка возможна при указании активной ссылки на данную страницу.




























Создана новая технология получения доступного графена
Новая сборка Windows 10 уже доступна на сайте Microsoft