1780
Електродвигуни: які вони
У попередніх статтях розглянуто принцип синхронних і асинхронних електродвигунів, а також як їх контролювати. Але існує безліч видів електродвигунів! І кожен з них має свої властивості, сферу і особливості. У статті наведено короткий огляд різних типів електродвигунів з фото та прикладами додатків. Чому деякі двигуни ставлять в пилосос, а інші в вентиляторі витяжки? Які двигуни в Segway? Який поїзд метро рухається?
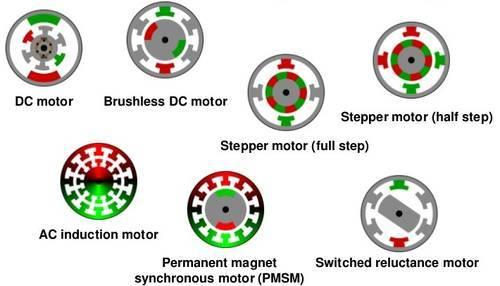
Кожен електродвигун має певні відмінні властивості, які визначають його поле застосування, в яких він найбільш вигідний. Синхронний, асинхронний, прямий струм, колектор, безщіточний, клапан-індуктор, крок ... Чому б не, як з двигунами внутрішнього згоряння, запроваджують пару типів, вдосконалюють їх і кладуть їх і тільки в усіх додатках? Пройдемо всі види електродвигунів, і в кінці ми будемо обговорювати, чому є так багато і які двигуни є кращими.
Двигун прямого струму (DPT)

Кожен повинен бути знайомий з цим двигуном з дитинства, оскільки цей тип двигуна використовується в більшості старих іграшок. Батарея, два контактні проводки і звук знайомого нечіта, надихаючи подальші дизайнерські подвиги. Хто, хто не зробив? Я сподіваюся так. В іншому випадку, ця стаття, ймовірно, не буде інтересу до вас. Всередині такого двигуна встановлюється контактний блок на вал - колектор, який перемикає обмотки на ротор в залежності від положення ротора. Прямий струм, що надходить до потоку двигуна, потім на одному, потім на інших частинах обмотки, створюючи крутний момент. По дорозі, не ходячи занадто далеко, кожен напевно дивився – який вид жовтих речей стояв на деякі DPT з іграшок, прямо на контактах (як на фото вище)? Це конденсатори - коли колектор працює через перемикання, струм споживання пульсується, напруга також може змінюватися стрибками, через які двигун створює багато перешкод. У радіокерованій іграшковій камері встановлено, що DPT встановлена в радіокерованих тонах. Конденсатори просто вислуховують такі високочастотні пульсації і, відповідно, знімають перешкоди.
Двигуни постійного струму приходять в дуже невеликий розмір ( "вібра" в телефоні) і досить великий – зазвичай до мегавату. Наприклад, на фото нижче показано електровозмінний тяговий двигун потужністю 810 кВт і напругою 1500В.
347621
Чому не робить DPT більш потужним? Основна проблема всіх DPT, а особливо високопотужних DPT, є колектором. Розсувний контакт в самому собі не дуже хороша ідея, і ковзання контакту на кіловольтах і кіломперах - і ще більше. Таким чином, дизайн колектора для високопотужного DPT є артом, а на потужності над мегаватом стає занадто важко зробити надійний колектор.
В якості споживача DPT добре підходить для його простоти в умовах керованості. Його момент прямо пропорційний струменю, а частота обертання (при найменшій кількості idling) безпосередньо пропорційна напрузі наноситься. Таким чином, перед появою ери мікроконтролерів, електромереж і частотного регулювання AC приводу, DPT був найпопулярнішим електродвигуном для завдань, де потрібно регулювати швидкість або момент.
Також необхідно згадати, як він знаходиться в DPT, що утворюється магнітний потік збудження, за допомогою якого відбувається якір (ротор) взаємодіє і, за рахунок цього виникає крутний момент. Цей потік можна зробити двома способами: постійними магнітами і збудженням. У невеликих двигунах найчастіше ставляться постійні магніти, у великих - збудження намотування. Екреативне обмотування є ще одним каналом регулювання. В якості струму збудливого намотування підвищується його магнітний потік. Цей магнітний потік входить як в формулу моторного крутного моменту, так і в формулі EMF. Чим вище магнітний потік збудження, тим вище розвиваючий момент при однаковому анкерному струмі. Але чим вище EMF машини, що означає, що з однаковою напругою живлення, швидкість idling двигуна буде нижче. Але якщо ви знизите магнітний потік, то з однаковою напругою живлення, частота нахилу буде вище, збираєтеся нескінченність при зниженні коефіцієнта збудження до нуля. Це дуже важлива властивість ДРТ. В цілому я впевнено раджу вивчити рівняння DPT – вони прості, лінійні, але їх можна застосувати до всіх електродвигунів – процеси схожі всюди.
Універсальний колектор двигуна
19907064Р.
Зовсім досить, це найпоширеніший електродвигун в повсякденному житті, ім'я якого найменш відома. Чому це відбувається? Його дизайн і характеристики такі ж, як двигун постійного струму, тому згадка про це в приводних підручниках зазвичай розміщується в самому кінці глави на DPT. У той же час, коли об'єднання колекціонера = DPT настільки міцно встановлена в голові, що не кожен приходить до розуму, що двигун постійного струму, в ім'я якого є «здатний струм», теоретично може бути включений в мережу змінного струму. Давайте розберемося.
Як змінити напрямок обертання двигуна постійного струму? Кожен знає це, нам потрібно змінити поляризацію електроживлення якірної. А ще? І можна також змінити поляризацію постачання збудження, якщо збудження проводиться за допомогою обмотки, а не магнітами. І якщо полярність змінилася як на анкері, так і на обмотку збудження? Це право, напрямок обертання не змінюється. Що ми чекаємо? Підключіть обмотки анкерної та збудження послідовно або паралельно, щоб поляризувати зміни однаково там і там, а потім вставте в однофазну мережу змінного струму! Готовий двигун спиниться. Існує тільки один невеликий інсульт, який потрібно зробити: так як чергування струмових потоків вздовж збудження намотування, його магнітопровідник, на відміну від true DPT, необхідно проводити дроти для зменшення втрат від вихрових струмів. І так ми отримали так званий «універсальний двигун колектора», який є підвидами ДРТ, але... відмінно працює як з чергування і прямого струму.
Даний тип двигуна найбільш широко використовується в побутовій техніці, де потрібно регулювати швидкість обертання: дрилі, пральні машини (не з "прямим приводом"), пилососи і т.д. Чому він так популярний? Через легкість регулювання. Що стосується DPT, він може регулюватися рівнем напруги, який для мережі змінного струму здійснюється циліндром (непрямий тиристор). Схема керування може бути настільки простим, що він підходить, наприклад, прямо в тригері силового інструменту і не вимагає мікроконтролера, PWM або датчика положення ротора.
Асинхронний електродвигун
 р.
р.Ще більш поширений, ніж колекціонерний двигун - асинхронний двигун. Тільки вона розподіляється в основному в галузі - де є трифазна мережа. Окрема стаття була написана про принцип його роботи. Коротко, його статор являє собою розподілену двофазну або трифазну (поворотно багатофазну) обмотку. Підключається до джерела напруги змінного струму і створює обертається магнітне поле. Ротор може бути представлений у вигляді мідного або алюмінієвого циліндра, всередині якого є залізо магнітопровідника. До ротора в явному вигляді напруга не приводиться, але вона індукується там через змінне поле статора (попередньо двигун англійською мовою називається індукцією). Вихрові струми в коротко-розрядному роторі взаємодіють з поле статора, що призводить до крутного моменту.
Чому так популярний асинхронний двигун? Не має розсувного контакту, як колекторний двигун, тому він більш надійний і вимагає меншого обслуговування. Крім того, такий двигун можна розпочати з мережі змінного струму за допомогою "прямого запуску" - він може бути включений перемикачем "на мережі", в результаті чого двигун почнеться (з великим початковим струмом 5-7 разів, але допустимо). DPT порівняно висока потужність не може бути включена, від початкового струму буде спалювати колектор. Також, асинхронні диски, на відміну від DPT, можуть зробити набагато більше потужності - десятки мегаватів, також через відсутність колектора. Асинхронний двигун порівняно простий і дешевий.
Асинхронний двигун також використовується в повсякденному житті: в тих пристроях, де не потрібно регулювати швидкість обертання. Найчастіше це так звані «конденсаторні» двигуни, або, що це те ж саме, індукція «заглушки-фазні». Незважаючи на те, що з точки зору електродвигуна краще сказати "двофазний", просто одна фаза двигуна підключена до мережі безпосередньо, а другий через конденсатор. конденсатор робить фазовий зсув напруги в другому обмотку, що дозволяє створити обертається elliptical поле. Зазвичай такі двигуни використовуються в вентиляторах, холодильниках, невеликих насосах тощо.
Недолік асинхронного двигуна в порівнянні з DPT полягає в тому, що важко регулювати. Асинхронний електродвигун - генератор струму. Якщо асинхронний двигун просто знижує напругу без зменшення частоти, то він трохи знизить швидкість, так. Але це збільшить так званий слиз (задлог частоти обертання від частоти поля статора), збільшить втрати в ротор, який може перегрівати і обпекти. Ви можете подумати про це, як контроль швидкості легкового автомобіля виключно з зчепленням, підживленням повного газу та поворотом на четвертому передачі. Для правильної регулювання швидкості обертання індукційного двигуна, як частоти, так і напруги необхідно пропорційно регулювати. І краще організувати векторний контроль, як описано більш детально в попередній статті. Але це вимагає перетворювача частоти – всього пристрою з інвертором, мікроконтролером, датчиками та ін. До епоху електромереж і мікропроцесорної техніки (в останньому столітті) регулювання частоти був екзотичним – з нього нічого не обійтися. Але сьогодні регульований асинхронний електропривод на основі перетворювача частоти вже де-факто стандарт.
Синхронний електродвигун

2516889
Про принцип роботи синхронного двигуна також була окрема стаття. Є кілька підвидів синхронних приводів - з магнітами (PMSM) і без (з збудженням обмотки і контактними кільцями), з синусоїдним EMF або з трапезоїдальним (безпровідні двигуни DC, BLDC). Це може включати деякі крокові двигуни. До епоху силових напівпровідникових електромереж, синхронних машин використовуються як генератори (найбільші всі генератори всіх електростанцій синхронні машини), а також потужні приводи для будь-якого серйозного навантаження в промисловості.
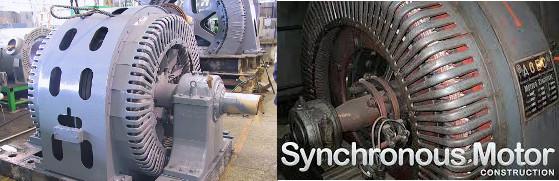
Всі ці машини були зроблені з контактними кільцями (можна подивитися на фото), звичайно ж, немає розмови про збудження від постійних магнітів на таку потужність. У той же час синхронний двигун, на відміну від асинхронного, має великі проблеми з початком. Якщо ви повернете на потужну синхронну машину безпосередньо на трифазну мережу, все буде погано. Так як машина синхронно, її необхідно різко обертати з частотою мережі. Але за час 1/50 другого ротора, звичайно, не встигнуть прискорювати від нуля до частоти мережі, і тому він просто висить назад і вперед, так як момент буде змінним. Це називається "синхронний двигун не введений синхронність." Таким чином, в реальних синхронних машинах використовується асинхронний старт-ап - невелика асинхронна пускова обмотка виконана всередині синхронної машини і збуджувального обмотування, що імітує «зварювальну клітину» асинхроніста для прискорення машини на частоту приблизно рівні частоти обертання поля, а після того, як збудження з прямим струмом перетворюється і машина намальовується в синхронізм.
І якщо асинхронний двигун для регулювання частоти обертання ротора без зміни частоти поля можливо, синхронний двигун не може нічого робити. Це або хребти з частого поля, або випадає з синхронізації і зупиняється з розпадом перехідних процесів. Крім того, синхронний двигун без магнітів має контактні кільця – розсувний контакт для передачі енергії до збудження на обмотки ротора. З точки зору складності, це, звичайно, не колекціонер DPT, але все ще буде краще без ковзання контакту. Саме тому в промисловості для нерегуляції навантаження, що використовується в основному, менш ємні приводи.
Але всі змінилися з приходом електромереж та мікроконтролерів. Вони дозволили формувати будь-яку бажану частоту поля для синхронної машини, пов'язаної з датчиком положення до ротора двигуна: для організації режиму клапана двигуна (автоматика) або векторного контролю. У той же час характеристики приводу в цілому (синхронний верстат + інвертор) виявився таким же, що вони отримують з двигуна постійного струму: синхронні двигуни, грані з абсолютно різними кольорами. Тому, починаючись з 2000 року, почався «бом» синхронних моторів з постійними магнітами. В першу чергу, вони timidly піднімаються в вентиляторах кулера, як невеликі двигуни BLDC, потім досягають моделей літаків, потім піднімаються в пральні машини як прямий привід, в електричну тягову тягу (Segway, Toyota Prius і т.д.), все частіше піднімаючи класичний колектор двигуна в таких задачах. Сьогодні синхронні двигуни з постійними магнітами захоплюють більше і більше додатків і йдуть в стрибках і меж. І все це завдяки електроніки. Але що краще синхронний моторний асинхронний, коли порівняння встановленого перетворювача + двигуна? Що гірше? Це питання буде розглянуто в кінці статті, і тепер давайте пройти кілька видів електродвигунів.
Двигун саморозбірного клапана (VID SV, SRM)
Має багато імен. Зазвичай коротко називається клапаном-індуктивним двигуном (VID) або клапаном-індуктивною машиною (VIM) або приводом (VIP). В англійській термінології вона переключена релюкція приводу (SRD) або двигуна (SRM), яка перекладається як машина з перемиканням магнітної стійкості. Але трохи нижче буде розглянуто ще один підтип цього двигуна, що відрізняється принципом роботи. Для того, щоб не заплутати їх один з одним, «ordinary» VID, який розглядається в цьому розділі, ми на кафедрі електроприводу на MPEI, а також на компанії NPF Vector LLC, називаємо «вентиляторний двигун з самовизначенням» або коротко VID SV, що підкреслює принцип збудження і відрізняє його від машини, розглянутого нижче. Але інші дослідники також називають його самовираженням VID, іноді реактивний VID (який відображає сутність утворення крутного моменту).

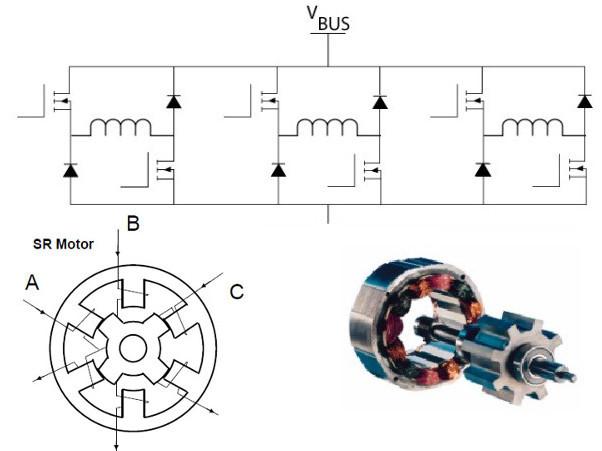
В основному, це найпростіший двигун і схожий за принципом до деяких крокових двигунів. Ротор — відступ. Стеля також загрожується, але з різною кількістю зубів. Самий простий принцип роботи пояснює цю анімацію:
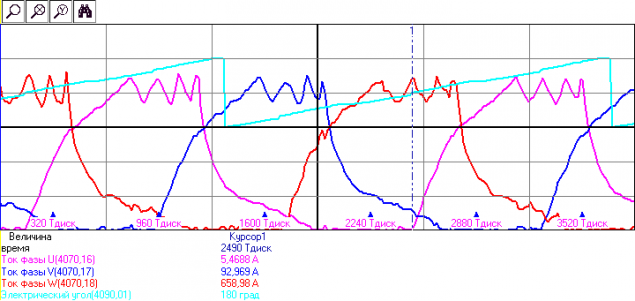
За допомогою прямого струму на фази, відповідно до положення струму ротора, двигун може бути виконаний в обертанні. Фаза може бути різною кількістю. Форма струму реального приводу для трьох етапів відображення на малюнку (поточне обмеження 600А):
 р.
р.Однак для простоти двигуна потрібно сплатити. Так як двигун працює неіполярними імпульсами струму / напруги, він не може бути включений безпосередньо в мережу. Необхідний датчик розташування ротора. Крім того, конвертер не класичний (як шести клавішний інвертор): для кожної фази, конвертер для SRD повинен мати півміста, як на фото на початку цього розділу. Проблема полягає в тому, щоб зменшити вартість компонентів і поліпшити макет перетворювачів, ключів живлення і діодів часто не виготовляються окремо: готові модулі, що містять два ключі і два діоди одночасно використовуються - так звані стійки. І це вони, які найчастіше повинні бути розміщені в конвертері для VID SV, половина ключів живлення, просто залишаючи невикористаний: отриманий надлишковий конвертер. Хоча в останні роки деякі виробники модулів IGBT випустили продукти, розроблені спеціально для SRD.
Наступною проблемою є пульсація крутного моменту. У зв'язку з джгутною структурою і імпульсним струмом, момент рідко стійкий - найчастіше це пульсує. Це дещо обмежує придатність двигунів для транспорту – які хочуть мати пульсуючий момент на колесах? Крім того, від таких імпульсів дотягувати зусилля, підшипники двигуна не відчувають себе дуже добре. Проблема дещо вирішується за допомогою спеціального профілювання фазової форми, а також збільшення кількості фаз.
Однак навіть з цими недоліками двигуни залишаються перспективними як регульований диск. Завдяки своїй простоті, сам двигун дешевше, ніж класичний індукційний двигун. Крім того, двигун легко зробити багатофазний і багатосекційний, розділивши контроль одного двигуна на кілька незалежних перетворювачів, які працюють паралельно. Це дозволяє збільшити надійність приводу – відключення, сказати, один з чотирьох перетворювачів не зупинить диск в цілому – три сусіди будуть працювати з невеликим перевантаженням протягом деякого часу. Для асинхронного мотора такий фокус не може виконуватися так легко, так як неможливо зробити незв'язані фази статора, які будуть контролюватися окремим перетворювачем повністю незалежно від інших. Крім того, VIDs дуже добре регулюється "до" від основної частоти. Роторний залізо може бути відключений до дуже високих частот.
ТОВ НФФ Вектор ми виконали декілька проектів на основі цього двигуна. Наприклад, ми зробили невеликий привід для гарячих водяних насосів, а нещодавно завершили розробку та налагодження системи управління для потужних (1.6 МВт) багатофазних відбійних приводів для переробних заводів ALROSA. Ось машина 1.25 МВт:

У нашій компанії NPF Vektor були розроблені системи контролю, контролери та алгоритми. Замовником роботи та дизайнером самих двигунів стала компанія МІП «Мехатроніка» SRSTU (NPI) .
Автономно збуджений двигун клапана (VID NV)
Це абсолютно інший тип двигуна, що відрізняється принципом роботи від звичайного VID. Історично відомих і широко використовуваних генераторів клапанів даного типу, що використовуються на літаках, кораблях, залізничному транспорті, але це двигуни цього типу з якихось причин, що займає мало.
 (Б)
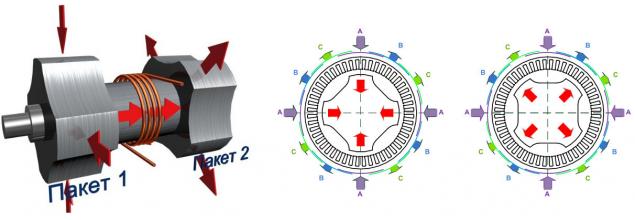
(Б)На малюнку схематично показує геометрію ротора і магнітний потік збудження, а також показує взаємодію магнітних флюсів статора і ротора, при цьому ротор на малюнку встановлюється в узгодженому положенні (момент нульовий).
ротор змонтований з двох пакетів (з двох половинок), між якими встановлюється збудження намотування (на малюнку показує як чотири повороти мідного дроту). Незважаючи на те, що обмотка висить «в середині» між половинками ротора, її кріпиться до статора і не обертається. Ротор і статор виготовлені з заліза, немає постійних магнітів. Намотування статора розподіляється трифазними - як в звичайному асинхронному або синхронному двигуні. Хоча існують варіанти цього типу машин з концентрованими обмотоками: зуби на статорі, як двигун SRD або BLDC. Одноразове обмотки статора охоплює як роторні пакети.
Спрощений принцип роботи можна описати наступним чином: ротор прагне перетворити на позицію, в якій напрямку магнітного потоку в статора (від струмів статора) і ротора (від струму збудження) збігається. При цьому половина електромагнітного моменту утворюється в одному пакеті, а половина в іншому. З боку статора машина має багатополярний синусоїдальне живлення (EMF sinusoidal), електромагнітний момент є активним (полірність залежить від поточного знака) і утворюється шляхом взаємодії поля, створеного струмом збудження обмотки з полем, створеним статором. За принципом роботи ця машина відрізняється від класичних степперів і двигунів SRD, в яких момент є реактивним (при залученні металевого бруса до електромагніту і силового знака не залежать від поточного знака електромагніту).
З точки зору контролю VID HB еквівалентно синхронному машині з контактними кільцями. Це, якщо ви не знаєте дизайн цієї машини і використовувати його як «чорна коробка», то вона поводиться практично непомітно з синхронної машини з збудженням. Ви можете зробити векторний контроль або автознімання, ви можете ослаблити потік збудження, щоб збільшити швидкість обертання, ви можете збільшити його для створення більш крутного моменту - все, як якщо це було класичний синхронний апарат з регульованим збудженням. Тільки VID HB не має зсувного контакту. І немає магнітів. А ротор у вигляді дешевого залізного бруса. І момент не дурить, на відміну від SRD. Ось, наприклад, синусоїдні струми VID NV під час векторного контролю:
2176476
Крім того, VID HB може бути створений багатофазний і багатосекційний, схожий на те, як це робиться в VID SB. Фази не пов'язані магнітні флюси і можуть працювати самостійно. Тобто, виходить, як якщо кілька трифазних машин в одному, кожен з яких приєднався до власного незалежного інвертора з векторним контролем, а отримана потужність просто підведено. Координація між трандукторами не потрібна взагалі – тільки загальний набір частоти обертання.
Недоліки цього двигуна також: він не може спинитися безпосередньо з мережі, так як на відміну від класичних синхронних машин, VID NV не має асинхронного початку намотування на роторі. Крім того, це більш комплексний дизайн, ніж звичайний SV VID (SRD).
На основі цього двигуна ми також зробили кілька успішних проектів. Наприклад, один з них - серія приводів насосів і вентиляторів для окружних теплових станцій Москви потужністю 315-1200 кВт (посилання на проект). Це низьковольтний (380V) VID NV з надмірністю, де одна машина "розширена" в 2, 4 або 6 незалежних трифазних секцій. Для кожного розділу наноситься аналогічний конвертер з бездоганним управлінням. Таким чином, можна легко збільшити потужність на основі одного типу конструкції перетворювача і двигуна. У той же час частина перетворювачів підключена до одного джерела живлення окружної теплової станції та частини до іншої. Таким чином, якщо на одному з вводів, то диск не піднімається: половина секцій коротко завантажуються, поки влада відновлюється. Після того, як вона відновлюється, перегородки автоматично вводяться на ходу. В цілому, ймовірно, цей проект заслуговує окремої статті, тому зараз я буду закінчити його, вставивши фото двигуна і перетворювачів:

Висновки: Який електродвигун краще?
На жаль, тут не вистачає двох слів. І загальні висновки про те, що кожен двигун має свої переваги і недоліки - теж. Оскільки найбільш важливі якості не вважаються - показники ваги і розмірів кожного і типів машин, ціна, а також їх механічні характеристики і вантажопідйомність. Подаруйте незареєстрований асинхронний привід, щоб закрутити насоси безпосередньо з мережі, немає конкурентів. Давайте залишаємо колекціонерні машини для шпинделя і пилососи, тут також складно змагатися з ними в ease регулювання.
Розглянемо регульований електропривод, режим роботи якого довгий. Збірні верстати відразу виключаються з конкуренції через ненадійність блоку збору. Але є ще чотири - синхронний, асинхронний і два види клапана. Якщо мова йде про привід насоса, вентилятора і щось схоже, що використовується в промисловості і де вага і розміри не особливо важливі, то синхронні машини виходять з конкуренції. Зв'язатися з кільцями необхідно намотати збудження, який є містким елементом, а постійні магніти дуже дорогі. Варіанти складання залишаються асинхронними приводами і клапанними двигунами обох типів.
Досвід показує, що всі три види машин успішно використовуються. Але – асинхронний привід неможливий (або дуже важко) перегородити, тобто розбити потужну машину на кілька малопотужних. Тому, щоб забезпечити велику потужність асинхронного перетворювача, потрібно зробити його високовольтним: після усього, потужність, якщо грубо, продукт напруги на струмі. Якщо для перегородженого приводу ми можемо взяти низьковольтний конвертер і встановити їх кілька, кожен на невеликому струмі, то для асинхронного приводу конвертер повинен бути одним. Але не робимо конвертер 500В і струм 3 кілограмів? Ці дроти ручні товсті. Тому для збільшення потужності, збільшення напруги і зменшення струму. Високовольтний конвертер - це абсолютно інший клас завдання. Ви не можете просто взяти 10k Ключі живлення V і перетворювати їх в класичний 6-ти ключ інвертор, як і раніше: немає таких ключів, і якщо є, вони дуже дорогі. Інвертор виконаний багаторівневим, на низьковольтних ключах, підключених в серії в складних поєднаннях. Цей інвертор іноді витягує спеціалізований трансформатор, оптичні канали управління ключами, складна розподілена система управління, яка працює в цілому. В цілому, все складно з потужними асимронічним приводом. У той же час, привід клапана-індуктора через секцію може «деле» перехід на високовольтний інвертор, що дозволяє зробити приводи до вузлів мегаватів від низьковольтної потужності, виготовленої за класичною схемою. У зв'язку з тим, що VIP стають більш цікавими, ніж синхронний диск, і навіть забезпечують надмірність. З іншого боку, асинхронні диски були в експлуатації на сотні років, а двигуни довели свою надійність. VIP-провайдери просто роблять свій шлях. Так що тут потрібно зважати багато чинників для вибору найбільш оптимального приводу для конкретного завдання.
Але все ще цікавіше, коли мова йде про перевезення або невеликі пристрої. Про масу і розміри електроприводу не можна турбуватися. І тут ви повинні подивитися на синхронні машини з постійними магнітами. Якщо ви подивитеся тільки на параметр живлення, розділений масою (або розмірами), то синхронні машини з постійними магнітами виходять з конкуренції. Індивідуальні екземпляри можуть бути в кілька разів меншими і світлішими, ніж будь-який інший "магнітний" привід змінного струму. Але є одна небезпечна непорозуміння, яку я тепер спробую розбити.
Просто тому, що синхронний верстат три рази менший і більш легкий, не означає, що краще для електротягів. Проблемою є відсутність регулювання потоку постійних магнітів. Потік магнітів визначає EMF машини. При певній частоті обертання EMF машини досягає напруги інверторного струму і подальшого збільшення частоти обертання стає складним. Те ж саме йде на підняття моменту. Якщо потрібно реалізувати більший момент, в синхронній машині потрібно збільшити струм статора - то буде збільшити пропорційно. Але це буде більш ефективним для збільшення потоку збудження – тоді магнітне насичення заліза буде більш гармонійно, а втрати будуть нижчими. Але знову ми не можемо збільшити потік магнітів. Крім того, в деяких конструкціях синхронних машин струматору не може бути збільшений за межі певного значення - магніти можуть бути демагнітизовані. Що відбувається? Синхронний апарат хороший, але тільки в одній точці, номінальний. З номінальною швидкістю і номінальним крутним моментом. вище і нижче, це погано. Якщо ви намальовуєте це, ви отримаєте таку характеристику частоти з моменту (на червоний):
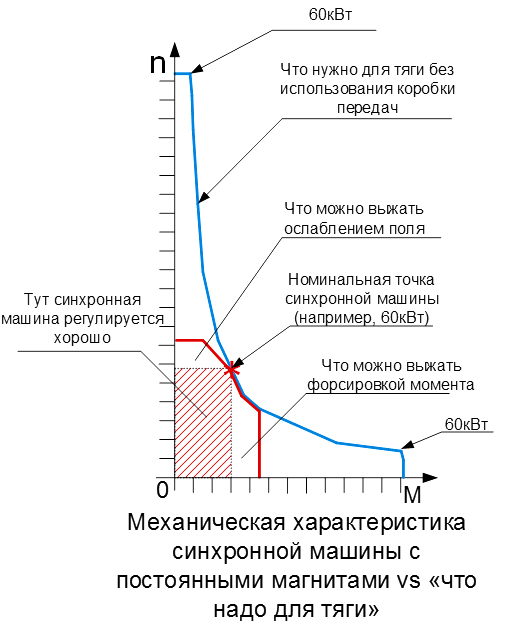
На малюнку на горизонтальній віссі момент відкладається двигун, на вертикальній - частота обертання. Астерськ позначив точку номінального режиму, наприклад, дайте йому 60 кВт. Затінений прямокутник - це діапазон, де можна регулювати синхронну машинку без проблем - тобто "зад" в часі і "зад" в частоті від номінального. Червона лінія відзначає, що можна вичавити з синхронної машини в надлишку номінального значення - невелике збільшення частоти обертання через так зване ослаблення поля (по суті, це створення надлишок струменя по осі двигуна в векторному контрольі), а також показує деякі можливі притискання в даний момент, щоб він був безпечним для магнітів. Проксимус Тепер поставте цей автомобіль у пасажирському автомобілі без коробки передач, де акумулятор розрахований на 60 кВт. Бажана характеристика тяги зображена в блакитному кольорі. Це, починаючи з найнижчої швидкості, кажуть від 10 км / год, привід повинен розвивати його 60 кВт і продовжувати розвивати їх до максимальної швидкості, кажуть 150 км / год. Синхронна машина не була закритою: її момент не достатньо навіть приїхати на бордюр на в'їзді (або на ребро на фронті, за політичну правильність), а автомобіль може прискорити тільки до 50-60 км / год.
Що означає? Синхронний апарат не підходить для електротяги без передачі? Звичайно, ви просто повинні вибрати його по-різному. Як це:
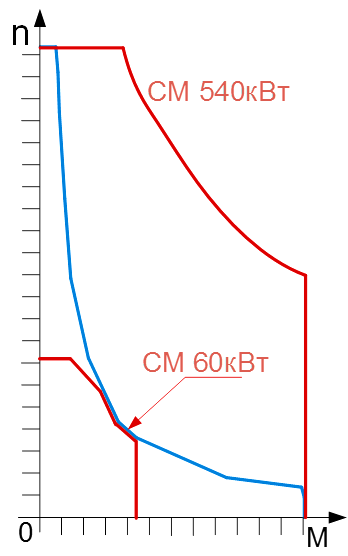
Необхідно вибрати такий синхронний верстат, який необхідний діапазон тягового регулювання був у всіх його механічних характеристиках. Таким чином, машина може одночасно розвивати великий момент і працювати на високій швидкості обертання. Як видно з фігури ... встановлена потужність такої машини не складе 60 кВт, але 540 кВт (можна розрахувати підрозділами). Для установки синхронної машини і інвертора 540 кВт необхідно встановити електромобіль потужністю 60 кВт.
Звичайно, як описано, ніхто не робить. Nobody ставить машину на 540kW замість 60kW. Синхронний верстат модернізований, намагаючись «змаїти» його механічні характеристики від оптимальної в одній точці до швидкості і в секунду. Наприклад, приховувати магніти в прасці ротора (змія включена), це дозволяє не боятися демагнетизації магнітів і ослаблення болгарки поля, а також перевантаження струму більше. Але з таких модифікацій синхронна машина набирає вагу, розміри і стає не так легкою і красивою, як вона була раніше. «Що робити, якщо інвертор вимкнено в режимі ослаблення». Машина EMF може "копати" посилання інвертора постійного струму і вигорнути все з. Або що робити, якщо інвертор на русі зламався - синхронна машина закриє і може вбити себе і водія, і всі залишилися живі електроніки з короткими струмами - вам потрібні схеми захисту і т.д.
Тому синхронний апарат хороший, де не потрібен великий діапазон регулювання. Наприклад, в Segway, де швидкість з точки зору безпеки може бути обмежена до 30 км / год (або скільки це таке?). І синхронна машина ідеально підходить для вентиляторів: вентилятор має порівняно невелику зміну частоти обертання, від сили в два рази - більше не робить багато сенсу, так як потік повітря послаблюється пропорційно площі швидкості (близько). Таким чином, для невеликих пропелерів і вентиляторів, синхронний верстат є те, що потрібно. І це дійсно там.
Вигнута тягача, зображена на малюнку в синьому кольорі, з часу амортизації були реалізовані двигунами постійного струму з регульованим збудженням: при зміні струму збудження відбувається в залежності від струму статора і частоти обертання. При збільшенні частоти обертання, зменшення струму збудження, що дозволяє прискорювати автомобіль і вище. Таким чином, DPT з незалежним (або змішаним) контроль збудження класично стояв і все ще стоїть в більшості тягових застосувань (метро, трамваї тощо). Який електричний апарат змінного струму може сперечатися з ним?
Ця характеристика (відповідність потужності) може бути краще підходити двигунами, які регулюються збудженням. Це асинхронний двигун і обидва види VIP. Але асинхронний двигун має два проблеми: перший, його природна механічна характеристика не є кривою констанцій. Оскільки збудження асинхронного мотора здійснюється через статор. А отже, в зоні ослаблення поля з констанцією напруги (при її закінченні інвертора), частота піднімається двічі призводить до падіння струму збудження двічі, а також в два рази. І з моменту на двигуні є продуктом струму на потік, момент падає 4 рази, і потужність, відповідно, два. Друга проблема – втрата ротора при перевантаженні з великим моментом. У асинхронному двигуні половину втрат виділяється в роторі, половина в статорі. Рідке охолодження часто використовується для зниження ваги і показників розмірів в транспорті. Але водяна куртка ефективно охолоджує тільки статор, завдяки явищі теплопровідності. Важко зняти тепло від ротаційного ротора - шлях відведення тепла через «термальну провідність» відрізається, ротор не доторкнуться статора (збірки не підраховують). Залишається повітряне охолодження, перемішуючи повітря всередині моторного простору або променевого тепла ротором. Таким чином, ротор асинхронного двигуна є своєрідним «термосом» - один раз перевантажуючи його (робляючи динамічне прискорення на машині), потрібно довго чекати для ротора, щоб охолонути. Але його температура ще не вимірюється ... ви тільки повинні прогнозувати від моделі.
Тут слід зазначити, як оволодіння проблемами індукційного двигуна, об’єднані Тесла в моделі С. Проблема з видаленням тепла від ротора, вони вирішили ... шляхом введення рідини в ротаційний ротор (вони мають відповідний патент, де вал ротора порожнистий і він промивається всередині рідиною, але я не знаю напевно, чи використовують це). І друга проблема з різким зменшенням крутного моменту, коли поле ослаблює ... вони не вирішуються. Вони кладуть двигун з тяговими характеристиками, майже як я забарвлюю для «червоної» синхронного двигуна на малюнку вище, тільки вони не мають 540 кВт, але 300 кВт. Зона ослаблення поля в Тесла дуже мала, близько двох крапок. Що таке «потрібний» для легкового автодвигуна, що замість бюджетного седану фактично спортивний автомобіль з величезною потужністю. Відсутність асинхронного мотора перетворилася в гідність. Але якщо вони намагалися зробити менш «продуктивний» седан, потужністю 100 кВт або менше, то аснайтронний двигун, швидше за все, буде точно таким же (300 кВт), тільки він буде штучно заплутаним електронно до ємності акумулятора.
І тепер ВІП. Що робити? Яка характеристика тяги? Про VID SV я не можу сказати напевно - це нелінійний двигун, і від проекту до проекту його механічних характеристик може істотно відрізнятися. Але в цілому, швидше за все, краще, ніж асинхронний двигун з точки зору підходу бажаних характеристик тяги з постійною потужністю. Але про VID NV я можу сказати більш детально, оскільки ми на підприємстві дуже тісно співпрацюємо з ним. Побачимо, що потрібної тяги характерна на малюнку вище, яка намальована в блакитному кольорі, що ми хочемо прагнути до? Це насправді не просто бажаний характер. Це реальний тяговий характер, який ми знімаємо на точках датчика моменту для одного з VID NV. Так як VID NV має незалежну зовнішні збудження, її якості близькі до DPT NV, які також можуть формувати таке тягове трактування, характерне для регулювання збудження.
Що? VID NV - ідеальний автомобіль для тяги без однієї проблеми? Не дуже. Він отримав багато проблем. Наприклад, його збудливе обмотування, яке «висає» між статорними пакетами. Незважаючи на те, що це не обертається, так само важко зняти тепло з неї - виходить ситуація практично як асинхронний ротор, тільки трохи краще. Ви можете, якщо це необхідно, "рядка" охолоджуюча трубка від статора. Друга проблема - надмірна вага і показники розмірів. Дивлячись на фігуру ротора VID NV, можна побачити, що простір всередині двигуна не використовується дуже ефективно - тільки початок і кінець ротора "робота" і середина зайнята збудженням. У асинхронному двигуні, наприклад, вся довжина ротора, все залізо, роботи. Складність складання - подрібнити збуджену обмотку всередині роторних пакетів, які ще повинні бути в змозі ( ротор стає знімним, відповідно, є проблеми з балансуванням). Добре, просто вага і розміри, так що далеко не дуже видатні порівняно з тими ж синхронними двигунами Tesla, якщо ви нав'язуєте характеристики тягового тракту на одному.
Існує також загальна проблема з обох типів VID. ротор - це парове колесо. І при високих обертальних частотах (і потрібна висока частота, тому високочастотні машини з однаковою потужністю менше, ніж уповільнення) втрат від змішування повітря всередині стає дуже значним. Якщо до 5000-7000 об / хв VID ще можна зробити, то на 20 000 об / хв він виявиться великим міксером. Але асинхронний двигун на таких частотах і набагато вище можна зробити за рахунок гладкого статора.
Так що найкраще для електроенергетики? Який двигун кращий?
У мене немає ідеї. Всі погані. Потрібні вентилювати більше. Але мораль статті полягає в тому, що якщо ви хочете порівняти різні види регульованого електроприводу, то потрібно порівнювати на конкретному задачі з конкретною необхідною механічною характеристикою у всіх параметрах, а не просто в потужності. Також дана стаття не розглядає багато нюансів порівняння. Наприклад, такий параметр як тривалість роботи на кожному з точок механічної характеристики. На максимальний момент, як правило, машина не може працювати довгий час - це режим перевантаження, а при максимальній швидкості синхронні машини з магнітами відчувають себе дуже погано - у них є величезні втрати сталі. Цікавим параметром для електричної тяги є втрата при проходженні драйвера. Якщо VIP- і асинхронні двигуни будуть обертатися як животик, то синхронна машина з постійними магнітами буде мати майже номінальні втрати сталі через магніти. І так далі і так...
Так ви не можете вибрати найкращий електричний привід.
Джерело: geektimes.ru/company/npf_vektor/blog/270666/