1778
Los motores eléctricos: lo que son
síncrono name="cut"> En artículos anteriores el principio de fue considerado y motores asíncronos , así como instrucciones sobre cómo manejarlos. Sin embargo, los tipos de motores, hay mucho más! Y cada uno de ellos tiene sus propias características, alcance y características. Este artículo es un pequeño resumen de los diferentes tipos de motores con imágenes y ejemplos de aplicaciones. ¿Por qué poner motores más limpios solo, y extractor de aire en el otro? Qué motores están en Segway? Y lo que se mueve el tren subterráneo?
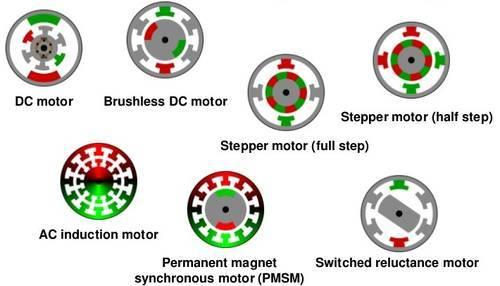
Cada motor tiene ciertas características de identificación que determinan su campo de aplicación en la que es más beneficioso. Síncrono, asíncrono, DC, colector, sin escobillas, válvula de inductor, paso a paso ... ¿Por qué, en el caso de los motores de combustión interna, no es inventar un par de tipos, llevarlos a la perfección y ponerlos, y sólo a ellos en todas las aplicaciones? Vamos a través de todos los tipos de motores eléctricos, y al final va a discutir por qué tantos de ellos y lo que el motor de "la mejor».
motor de corriente continua (DPT)

Con este motor, todos deberían estar familiarizado desde la infancia, ya que es este tipo de motor es en la mayoría de los juguetes viejos. Batería, dos cables a los contactos y el sonido familiar de los rumores que espera mayores obras de ingeniería. Todo no se hace? Con suerte. De lo contrario, este artículo no es probable que sea de su interés. Dentro de un motor de este tipo montado en el conjunto de pasador de eje - colector de conmutación de devanado del rotor, dependiendo de la posición del rotor. de corriente constante suministra al motor, se procede a lo largo de los entonces otras partes de la bobina, la creación de torque. Por cierto, sin ir demasiado lejos, después de todo, debe haber preguntado - lo que la sustancia amarilla se paró en el DBT algunos de los juguetes directamente a los contactos (como se ilustra arriba)? Este condensador - cuando se trabaja colector de impulso de maniobra consumo de energía, la tensión también puede cambiar abruptamente, debido a lo cual el motor produce mucho ruido. Están especialmente obstaculizados cuando el TED está instalado en los juguetes de control remoto. Los condensadores se inactivaron ondulación acaba de alta frecuencia y, en consecuencia, se elimina la interferencia.
motores de corriente continua son un tamaño muy pequeño ( "vibración" en el teléfono), y bastante - típicamente hasta megavatios. Por ejemplo, en la foto de abajo muestra un motor de tracción de un 810kVt de energía eléctrica y el voltaje de 1500V.

Por qué no hacer DPT más fuerte? El principal problema de la DPT, DPT y, en particular, de alta potencia - un nodo colector. Contacto deslizante en sí mismo no es una idea muy buena, y el contacto deslizante en kilovoltios kA y - aún más. Por lo tanto, el diseño conjunto del colector de gran alcance DPT - un arte, y para hacer un colector confiable se vuelve demasiado difícil para encender megavatios.
En el consumidor como DPT es bueno para su simplicidad en términos de manejabilidad. Es directamente proporcional a la corriente de la armadura y la velocidad (al menos en ralentí) es directamente proporcional a la tensión aplicada. Por lo tanto, hasta el advenimiento de los microcontroladores, electrónica de potencia y accionamiento de CA de frecuencia variable es la DPT fue el motor más popular para aplicaciones en las que la necesidad de ajustar la velocidad o el tiempo.
Además de ser mencionado como que se forma en el campo de flujo magnético DPT, que interactúa con el inducido (rotor) y debido a esto no es el par. Esta corriente se puede hacer de dos maneras: imán permanente y devanado de campo. En motores más pequeños a menudo dan imanes permanentes en gran - devanado de campo. La unidad de bobinado - este es otro canal de control. Con el aumento de corriente de la bobina de excitación aumenta su flujo magnético. Este flujo está incluido en la fórmula de par motor, y el EMF fórmula. Cuanto mayor sea la excitación de flujo magnético, mayor será el par desarrollado con la misma corriente de armadura. Sin embargo, cuanto mayor sea la máquina de los campos electromagnéticos y los medios a la misma tensión de alimentación de ralentí velocidad del motor es inferior. Pero si se reduce el flujo magnético, que a la misma tensión de alimentación de velocidad de ralentí será mayor de entrar en el infinito con una disminución en el flujo de la excitación a cero. Esta es una propiedad muy importante de DBT. En general, yo recomiendo estudiar DPT - son simples, lineales, pero pueden extenderse a todo - motores procesos similares en otros lugares
.
colector universal
motor
Irónicamente, es el más común en el hogar de motor, el nombre de los cuales se sabe lo más mínimo. ¿Por qué ocurrió? Su construcción y las características son las mismas que en un motor de corriente continua, por lo que la mención de él en los libros de texto de la unidad se colocan generalmente en la parte final del capítulo acerca de la DPT. Esta asociación colector = DPT se sienta tan firmemente en la cabeza, que no todo el mundo viene a la mente es que el motor de corriente continua, que está presente en el título, "DC", es teóricamente posible incluir en la red de corriente alterna. Vamos a ver.
Cómo cambiar la dirección de rotación de un motor DC? Se sabe que todo, es necesario cambiar la polaridad de la armadura. Y, sin embargo? Y, puede cambiar la polaridad de la alimentación del campo, si la excitación se hace sinuoso, y no a los imanes. Y si el cambio de polaridad y los devanados de inducido y la excitación? Así es, el sentido de giro no cambia. Entonces, ¿qué estamos esperando? Conectamos el devanado inducido y la excitación en serie o en paralelo, a la misma polaridad cambiado aquí y allá, y luego insertado en una alimentación de CA monofásica! Hecho, el motor girará. Sólo hay una pequeña barra, que debe realizarse: porque por la bobina de excitación circula la corriente, su circuito magnético alterno, en contraste con la verdadera DPT, es necesario para producir un laminado para reducir las pérdidas por corrientes de Foucault. Y así llegamos a la denominada "motor de colector universal", que por diseño es una subespecie de la DPT, pero ... funciona muy bien como AC y DC.
Este tipo de motor más ampliamente distribuida en los aparatos domésticos, donde la necesidad de ajustar la velocidad: taladros, lavadora (no una "transmisión directa"), aspiradoras, etc. ¿Por qué es tan popular? Debido a su facilidad de regulación. Al igual que con el DPT, es posible ajustar el nivel de tensión, que es un triac (tiristor bidireccional) para AC. circuito de control puede ser tan simple que se coloca, por ejemplo, directamente en la "activación" de la potencia y no requiere microcontrolador o PWM, no hay ningún sensor de posición del rotor.
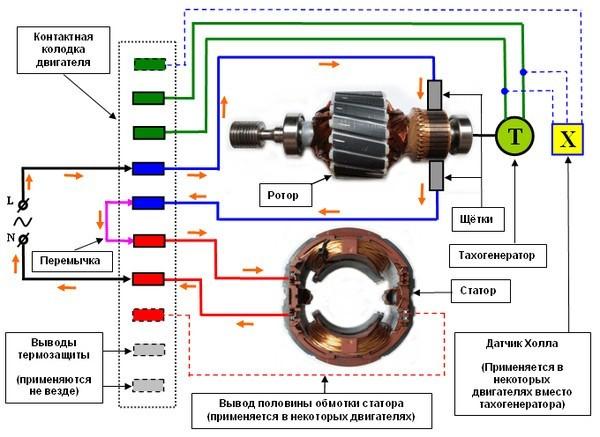
motor asíncrono

Incluso más común que el motor de colector es un motor de inducción. Sólo se distribuye principalmente en la industria - donde hay una red trifásica. Acerca de la forma en que las obras escritas artículo separado. En resumen, su estator - un distribuye en dos fases o de tres fases (polifásico menos) de la bobina. Está conectado a una fuente de voltaje de CA, y genera un campo magnético giratorio. El rotor puede ser pensado como un cilindro de cobre o de aluminio, en cuyo interior es un hierro magnético. Por explícitamente se aplica el voltaje del rotor, pero no es inducida por el campo alterno del estator (así que el motor en el idioma Inglés se llama inducción). Emergentes corrientes parásitas en el rotor en cortocircuito que interactúan con el campo del estator, resultando en un par de torsión.
¿Por qué motor asíncrono es tan popular? No tiene contacto deslizante, como un motor de colector, y por lo tanto es más fiable y requiere menos mantenimiento. Además, este motor puede ser iniciado por AC "arranque directo" - puede activar el interruptor "en la red", con el resultado de que el motor arranque (con altas corrientes de entrada de 5-7 veces, pero aceptable). DPT potencia relativamente alta por lo que no se puede activar desde el colector de corriente de puesta en marcha Pohorje. También unidad asíncrona, a diferencia de la DPT, se puede hacer mucho más poder - decenas de megavatios, debido también a la ausencia de colector. En este motor de inducción es relativamente simple y barato.
El motor de inducción se utiliza en la vida cotidiana: En dispositivos en los que no es necesario ajustar la velocidad. Muy a menudo, los llamados motores "de condensación", o lo que es lo mismo, asinhronniki "de una sola fase". Aunque en realidad desde la perspectiva del motor correcto hablar de "dos fases", sólo una fase del motor está conectado directamente a la red, y el segundo a través del condensador. Fabricación de un condensador de desplazamiento de fase a la segunda tensión de bobinado que crea un campo magnético giratorio elíptica. Por lo general, estos motores se utilizan en el extractor de aire, refrigerador, pequeñas bombas, etc.
Menos motor de inducción en comparación con DBT es que es difícil de regular. Motor asíncrono - es el motor de corriente alterna. Si el motor de CA simplemente bajar la tensión sin disminuir la frecuencia, se reducirá la velocidad de unos pocos, sí. Pero aumentará el deslizamiento llamada (velocidad de retardo de la frecuencia del campo del estator) aumentará las pérdidas en el rotor, por lo que puede sobrecalentarse y quemarse. Puede representar a mí mismo como un embrague movimiento de la cabina de control de velocidad exclusivamente mediante la presentación de acelerador a fondo y girar la cuarta marcha. Para ajustar correctamente la velocidad de un motor de inducción es proporcional a la necesidad de ajustar la frecuencia y la tensión. Y lo mejor de todo, y para organizar una lucha contra los vectores, tal como se describe con más detalle en un artículo anterior . Pero para ello es necesario un convertidor de frecuencia - un dispositivo con el inversor, el microcontrolador, sensores, etc. Antes de la era de la electrónica de semiconductores de potencia y tecnología de microprocesador (del siglo pasado) la regulación de frecuencia era exótica - no tenía nada que hacer. Pero hoy accionamiento eléctrico asíncrono ajustable basado en el convertidor de frecuencia - este es el estándar de facto
.
El motor síncrono

Sobre el principio del motor síncrono también era un artículo separado . unidades síncronos pueden ser varias sub - imanes (PMSM) y sin (con el devanado de campo y el anillo de deslizamiento), con la FEM sinusoidal o trapezoidal (motores DC sin escobillas, BLDC). Esto también puede incluir algunos de los motores paso a paso. Fue utilizado como un generador para la era de la electrónica de semiconductores de potencia montón de máquinas síncronas (casi todos los generadores de las centrales - máquinas síncronas), así como una unidad de gran alcance de las cargas graves en
industria.
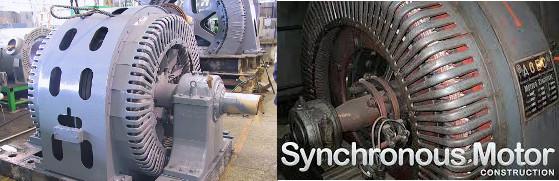
Todas estas máquinas se hicieron con anillos colectores (se puede ver en la foto), un imán permanente en tales capacidades de voz, por supuesto, no va. Al mismo tiempo, el motor síncrono, a diferencia asíncrono, comience con grandes problemas. Si se incluye una potente máquina sincrónica directamente a la red trifásica, entonces todo estará mal. Puesto que la máquina síncrona, que debe girar estrictamente con la frecuencia de la red. Sin embargo, durante 1/50 segundo rotor, por supuesto, acelerar de cero a frecuencia de red no tendrá tiempo, y por lo que será fácil de contracción de ida y vuelta, al igual que el tiempo de alternancia. Esto se llama "motor síncrono no se registra en". Por lo tanto, en las máquinas síncronas reales utilizada inicio asíncrono - hacer dentro de la máquina sincrónica pequeña bobina de partida asíncrona y el campo cortocircuitado bobinado, la simulación de "jaula de ardilla" asinhronnika para dispersar el coche a una frecuencia aproximadamente igual a la frecuencia del campo giratorio, y sólo entonces conmutada estimulación de corriente directa y la máquina se detuvo en sincronismo.
Y si el motor de inducción para ajustar la frecuencia del rotor sin cambiar la frecuencia del campo en todo lo que pueda, a continuación, el motor síncrono no puede ser de ninguna manera. Él o girar una parte del campo, o cae fuera de sincronismo y se detiene con transitorios repugnantes. Por otra parte, el motor síncrono tiene imanes sin anillos de contacto - contacto deslizante para transferir energía al devanado de excitación en el rotor. En términos de complejidad, desde luego, no es un coleccionista de DPT, pero aún así habría sido mejor sin contacto deslizante. Por eso, en la industria de la carga irregular se utiliza principalmente unidad asíncrona menos caprichoso.
Pero todo eso cambió con el advenimiento de la electrónica de semiconductores de potencia y microcontroladores. Se les permite formar una máquina sincrónica cualquier frecuencia deseada del campo, atado por las disposiciones del sensor de rotor del motor: organizar el funcionamiento del motor de la válvula (avtokommutatsiyu) o el control de vectores. En las mismas características de la unidad por completo (máquina sincrónica + inversor) han resultado ya que se obtienen del motor de corriente continua: los motores síncronos se reproducen en colores muy diferentes. Por lo tanto, a partir de algún lugar en el año 2000 se inició el "boom" de los motores síncronos de imanes permanentes. Al principio, con cautela quedan en el ventilador refrigerador como pequeños motores BLDC, entonces llegaron a la aeronave modelo luego se metieron en la lavadora como un accionamiento directo en la tracción eléctrica (Segway, Toyota Prius, y similares), están desplazando cada vez más clásico en tales problemas motores colector. Hoy en día, los motores síncronos de imanes permanentes agarran cada vez más aplicaciones y corren a pasos agigantados. Y todo esto - gracias a la electrónica. Pero ¿cuál es la mejor asíncrono motor síncrono cuando se compara conversor + motor? Y el peor? Esta cuestión se examinará al final del artículo, ahora vamos a ir más lejos en varios tipos de motores eléctricos.
inductor del motor de la válvula con la auto-excitación (VER ST, SRM)
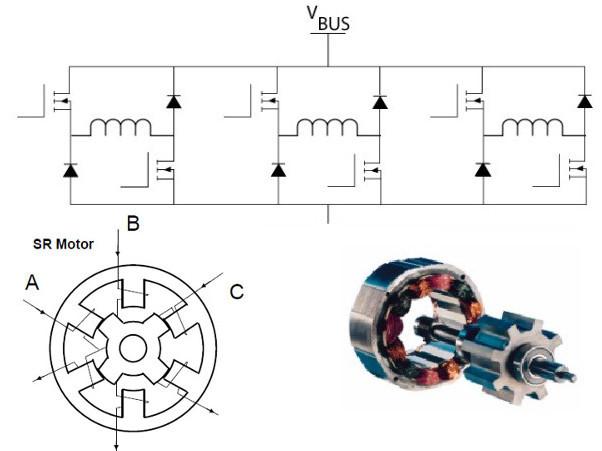
Él tiene muchos nombres. Por lo general, se refirió brevemente a como motor de válvulas-inductor (UCI) o máquinas válvula de inductor (VIM) o unidad (VIP). En la terminología de Inglés se conmuta la unidad de reluctancia (SRD) o motor (SRM), que se traduce en un coche con reluctancia conmutada. Pero justo debajo será considerado otra subespecie del motor, caracterizado por el principio de acción. Con el fin de no confundir uno con otro, el aspecto "normal", que se considera en esta sección, estamos en la silla eléctrica en la MEI, así como en la empresa OOO "NPF vector" llamada "motor de la válvula-inductor con auto-excitado" o una breve vista ST que se se hace hincapié en el principio de excitación y lo distingue de la máquina, se discute a continuación. Sin embargo, otros investigadores también han llamado Vista desde samopodmagnichivaniem VISTA veces reactiva (que captura la esencia de la formación del par).

Estructuralmente, es el motor más simple y en el principio de acción es similar a algunos de los motores paso a paso. Rotor - pieza dentada de hierro. Estator - el mismo equipo, pero con un número diferente de dientes. La manera más fácil de explicar el principio de esta animación aquí:
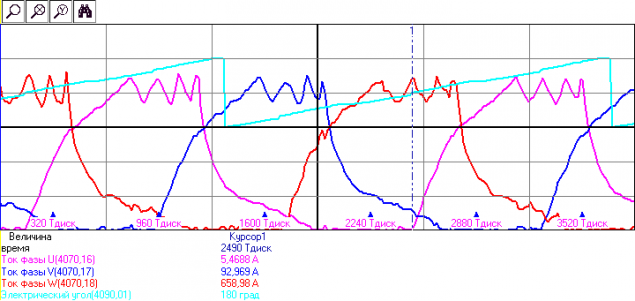
La alimentación de corriente continua en fases de acuerdo con la posición actual del rotor puede causar que el motor gire. Fases pueden ser un número diferente. Formar una corriente de excitación real para las tres fases de la muestra en la imagen (límite de corriente 600A):
Sin embargo, la simplicidad del motor tiene que ser pagado. Puesto que el motor es alimentado pulsos unipolares de corriente / tensión, de forma directa "en la red" no se puede activar. Asegúrese de que deseas convertidor y el sensor de posición del rotor. Por otra parte, el inversor no es clásica (tipo shestiklyuchevoy inversor) para cada fase del convertidor para el DRS debe ser la mitad de una milla, como en la foto al principio de esta sección. El problema es que con el fin de reducir el coste de los componentes y la mejora de la disposición de interruptores de alimentación transductores y diodos se fabrican a menudo por separado: módulos terminados comúnmente usados que contienen simultáneamente dos interruptores y dos diodos - el llamado bastidor. Y que con mayor frecuencia tienen que poner en el convertidor de VID SW, interruptores de media potencia, simplemente dejando sin explotar: un inversor excesiva. Aunque en los últimos años, algunos fabricantes han lanzado productos de módulos IGBT diseñados específicamente para el DRS.
Siguiente problema - un rizado del par. En virtud de la estructura dentada y el pulso actual momento consigue raramente estable - más a menudo es pulsante. Esto limita un tanto la aplicabilidad de los motores de los vehículos de motor - que quieren tener un par pulsante en las ruedas? Además, mediante tales impulsos fuerza de tracción no es muy buena sensación de los cojinetes de motor.