1763
电动马达:它们是什么
在以前的文章的原则被认为是同步和<一个HREF =“https://geektimes.ru/company/npf_vektor/blog/270206/”> 异步电动机,以及如何管理它们的说明。但该种电动机中,有更多!他们每个人都有自己的特点,适用范围和功能。这篇文章是不同类型的图片和应用实例电机的小概述。为什么单独把清洁的发动机和排气风扇在其他?其中发动机在赛格威?什么运动地铁列车?
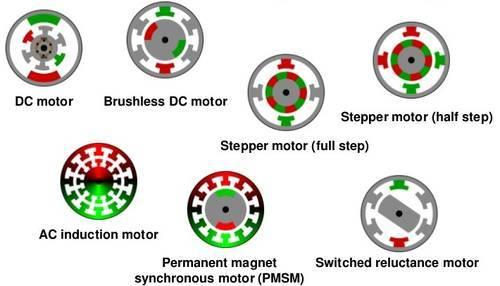
每个电机具有一定的识别特征而确定它的应用,其中它是最有利的领域。同步,异步,DC,集热器,无刷,阀感应器,步进...为什么,在内燃机的情况下,不创造几个类型,为他们带来完美,并把他们,只有他们所有的应用程序?让我们通过各类电动马达,并在年底将讨论为什么这么多的人,什么发动机“最好»。
直流电动机(DPT)

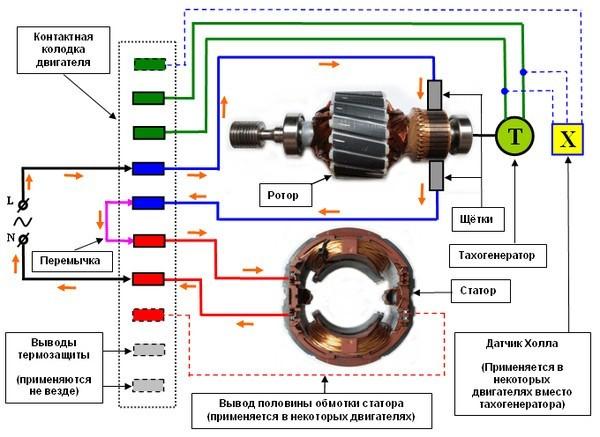
有了这个引擎,都应该从小熟悉的,因为它是这种类型的发动机是在广大的旧玩具。电池,两根电线的接触和鼓励进一步的工程壮举的嗡嗡声的熟悉的声音。所有的是不是吗?但愿。否则,这篇文章是不是可能是你的兴趣。在这样一个马达安装在轴销总成 - 集电极切换转子绕组,取决于转子的位置。恒定电流供给电动机,沿着线圈的再其他的地方之一进行,创造转矩。顺便说一句,没有走得太远,毕竟,一定想知道 - 站在什么黄色的东西在DBT一些玩具直接接触(如上图)?该电容 - 工作的开关功耗冲击收集器时,电压也可以突然改变时,由于该发动机可产生大量的噪音。当安装在遥控玩具的DPT它们尤其阻碍。电容器骤冷,因此,所述干扰除去只是高频纹波。
直流电动机是一个非常小的尺寸(在手机“振动”),以及相当多的 - 通常高达兆瓦。例如,在下面的照片显示了一个电力810kVt和1500V电压的牵引电动机。

为什么不强DPT?特别是高功率的DPT,DPT和存在的主要问题 - 一个收集器节点。本身滑动接触是不是一个很好的主意,并在千伏KA和滑动接触 - 更是如此。因此,收集器组件设计,强大的DPT - 一门艺术,做一个可靠的收集变得太难兆瓦电。
在以消费者为DPT有利于它在可管理性方面的简单性。它是成正比的电枢电流和转速(至少在空转)是正比于施加的电压。因此,直到微控制器,电力电子和变频交流传动的出现是DPT是应用中需要调整的速度和时间最流行的运动。
因为它是在DPT磁通量场,其与电枢(转子)相互作用形成也被提及,并由于这种有转矩。此流可以通过两种方式来完成:永久磁铁和场绕组。在更小的发动机往往会给永磁体大 - 励磁绕组。该发条驱动 - 这是另一个控制通道。随着励磁线圈电流的磁通量增加。此磁通被包括转矩的公式,式电动势英寸的励磁磁通越高,形成的扭矩具有相同的电枢电流越高。但机器电动势较高的装置,以及在发动机的相同的电压供给速度空转较低。但如果减小磁通量,即在相同的电源电压怠速将更高进入无限与激发的零流量的减少。这是DBT的一个非常重要的性质。一般情况下,我强烈建议学习方程DPT - 他们是简单的,线性的,而是可以扩展到所有电机 - 类似的过程在别处
。
通用换向器电动机
讽刺的是,它是最常见的中置电机,其中至少是已知的名称。为什么会发生?其结构和功能是相同的直流电动机,因此,它在驱动器中的教科书中提及通常放置在大约DPT的章节的最后。该协会收集= DPT如此坚定地坐在头,不是每个人都想到的是,直流电机,这是目前的称号,“DC”,这在理论上是可能的交流网络中包括。让我们来看看。
如何改变的直流马达的旋转的方向是什么?已知的是所有,有必要改变电枢的极性。然而?而且,你可以改变字段电源的极性,如果激励完成缠绕,而不是磁铁。并且如果极性变化和电枢绕组和励磁?这是正确的,旋转的方向不会改变。那么,我们还在等什么?我们连接电枢绕组和励磁串联或并联,以相同的极性在这里和那里改变,然后插入到单相AC电源!完成后,发动机会旋转。只有一个小酒吧,必须做到:因为由激发线圈流动交变电流,其磁路,在对比的是真DPT,有必要产生一个叠层,以减少涡流损耗。所以我们得到了所谓的“万能换向器电动机”,它由设计是DPT的一个亚种,但是......作为AC和DC的伟大工程。
这种类型的发动机分布最广的家电,在这里需要调整速度:钻头,洗衣机(不是“直接驱动”),吸尘器等为何如此受欢迎?由于其易于调节。作为与DPT,能够调整电压电平,这对于交流三端双向可控硅(双向晶闸管)。控制电路可以如此简单,它被放置,例如,直接进入的功率的“触发”,并且不需要微控制器或PWM,没有转子位置传感器。
异步电动机

甚至比换向器电动机更常见的是感应电动机。只有它主要分布在产业 - 那里有一个三相网络。它是如何工作的书面 的另一篇文章。总之,它的定子 - 分布式两相或三相(多相更少)线圈。它被连接到一个交流电压源,并且产生一个旋转磁场。转子可以被认为是一个铜或铝圆柱体,在其内部是磁铁。通过明确转子施加电压,但它是由定子的交变磁场感应存在(因此在英语语言的发动机被称为诱导)。新兴的短路转子涡流与定子磁场相互作用,从而产生转矩。
为什么异步电动机是如此受欢迎?它不具有滑动接触,如换向器电动机,因此它是更可靠,需要较少的维护。此外,这种发动机可以由交流“直接启动”启动 - 你可以打开开关“的网络上的”,其结果是发动机启动(用5-7倍的高浪涌电流,但是可以接受的)。 DPT相对高的功率,从而不能从启动电流集电极尔耶启用。此外异步驱动,而不是百白破,你可以做更多的权力 - 几十兆瓦,也因缺乏收集器。在这种感应电动机是相对简单和便宜。
感应电机在日常生活中使用:设备的位置没有必要调整速度。大多数情况下,所谓的“冷凝”发动机,或什么是一样的,“单相”asinhronniki。虽然在从马达正确说话“两相”的,直接连接到网络的电机的只是一相,并且通过冷凝器的第二角度现实。使得相移电容器到第二电压绕组创建一个椭圆形的旋转磁场。通常情况下,这些发动机在排气风扇,冰箱,小泵等
使用
与DBT相比较少感应电动机是,它是很难调节。异步电动机 - 是交流电动机。如果交流电机简单地降低电压不降低频率,它会降低一些速度,是的。但是,这将增加所谓的滑移(从定子场的频率的延迟速度)会增加转子,这就是为什么它过热和燃烧损失。您可以完全由提交全油门和转向四档它代表了自己作为一个速度控制汽车运动离合器。适当调整感应电动机的速度成正比的需要调整的频率和电压。最重要的是,组织矢量控制,如在以前的文章 更详细的描述。但是,为此,你需要一个变频器 - 与变频器的设备,微控制器,传感器等。功率半导体电子和微处理器技术(上个世纪)频率调节是充满异国情调的时代之前 - 这是无事可做。但基于变频器今天可调异步电力驱动 - 这是标准的事实上的
。
同步电动机

关于同步电机的原则也是一个单独的文章。同步驱动器可以是多个子 - 磁体(PMSM)和无(与磁场绕组和滑环),具有正弦或梯形的EMF(直流无刷电机,无刷)。这还可以包括一些步进电机。它被用来作为发电机功率半导体电子产品大量同步电机(电厂几乎所有发电机 - 同步电机)的时代,以及为工业
任何严重的负载强大的驱动器。
所有这些机器均与滑环(可以在照片中看到的),永久磁铁的这种能力演讲中,当然,不走了。在同一时间同步电动机,不同于异步,开始与大的问题。如果你直接包含一个强大的同步电机的三相网络,那么一切都将是坏的。因为同步机,它必须与网络频率严格旋转。但是1/50秒转子中,当然,从零加速到工频不会有时间,所以它会很容易抽搐来回,也将时间交替出现。这被称为“同步电机没有登录的”。因此,在真实同步机使用异步启动 - 同步机小异步起始线圈和短路领域内做绕组,模拟“鼠笼”asinhronnika到汽车分散到大约等于所述场的旋转频率的频率,并且它被切换直流激发后与机拉入同步。
和如果感应电动机来调整转子的频率,而不改变以任何方式,我们可以将场的频率,则同步电动机不能以任何方式。他或旋转场的一部分,或脱落同步的并与恶心瞬变停止。此外,该同步电机具有无接触环磁体 - 滑动接触,能量传递到励磁转子绕组。在复杂性方面,它肯定不是DPT的收藏家,但还是会一直没有滑动接触更好。这就是为什么在行业内不规则负载主要用于任性异步驱动器。
但是,所有功率半导体电子和微控制器的出现改变。他们被允许形成用于同步机的领域中的任何所需的频率,由电机转子传感器的规定并列:组织阀发动机运行(avtokommutatsiyu)或矢量控制。在该驱动器的相同的特性完全(同步机+逆变器)已经被证明,因为它们是从直流电动机获得:同步电机在非常不同的颜色播放。因此,在开始的地方,2000年开始与永磁体同步电机的“繁荣”。起初,他们小心翼翼地走出了冷却器风扇小BLDC电机,然后到了航模,然后爬进洗衣机作为电力牵引直接驱动(赛格威,丰田Prius,等等),正越来越多地取代在这些问题换向器电动机的经典。今天,随着永磁体同步电机攫取越来越多的应用,并实现了跨越式运行。而这一切的 - 由于电子。但是,什么是比较器集+引擎时,最好同步异步电动机?而最糟糕的?这个问题将在文章的结尾可以考虑,现在让我们走得更远几种类型的电动机。
自激电感气门发动机(VIEW ST,SRM)
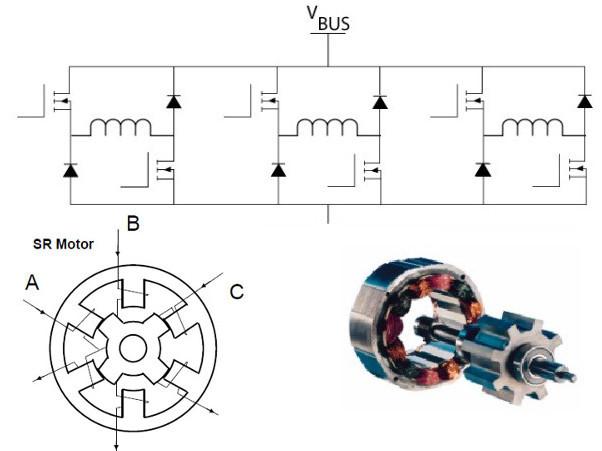
他有很多名字。一般,它简称为阀电感发动机(UCI)或阀电感机(VIM)或者驱动器(VIP)。在英语术语开关磁阻电机(SRD)或电机(SRM),转化为与开关磁阻汽车。但正下方将被认为是发动机的另一亚种,其特征在于动作的原理。为了不与对方,“正常”的出现,这是在本节考虑迷惑他们,我们是在MEI电动椅子上,以及对公司OOO“NPF矢量”呼“阀感应电机自激”或快速查看ST的它强调激发的原理并从机器,下面讨论的区别。但其他研究人员也称鉴于从samopodmagnichivaniem有时反应VIEW(捕获扭矩形成的精华)。

在结构上,这是最简单的发动机和上动作的原理类似于一些步进电机。转子 - 参差不齐的一块铁。定子 - 同一齿轮,但具有不同的齿数。最简单的方法在这里解释这个动画的原理:
喂养分阶段的直流电流在根据转子的当前位置可能会导致电机旋转。阶段可以是不同的数字。形式的展现在图片中的三个阶段一个真正的驱动电流(限流600A):
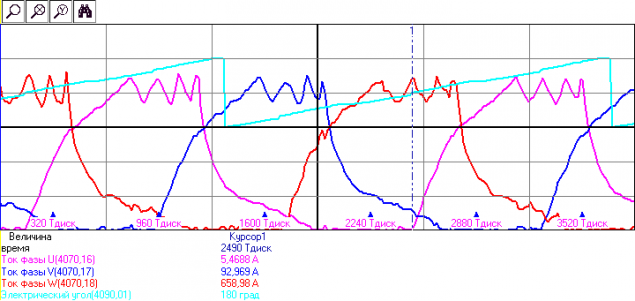
然而,在发动机的简单性,必须支付。由于发动机通电“网上”电流/电压的单极性脉冲,直接它不能被启用。一定要转换器和转子位置传感器。此外,该逆变器是不经典(类型shestiklyuchevoy逆变器)的转换器,用于SRD的各相必须是半英里,如在本节的开头的照片。问题是,为了减少部件的成本,并提高换能器的功率开关的布局和二极管通常制造分开:其同时包含两个开关和两个二极管常用成品模块 - 所谓的架上。而且,他们经常不得不把在转换器VID SW,半功率开关只需留下的未开发:过度的逆变器。尽管近年来一些厂家已经发布的产品专为SRD设计的IGBT模块。
接下来的问题 - 一个转矩脉动。凭借齿结构和脉冲电流瞬间很少得到稳定的 - 它经常脉动。这多少有些限制发动机的机动车辆的适用性 - 谁希望有车轮上的脉动转矩?另外,通过这样的脉冲拉力不是发动机轴承的非常良好的手感。问题解决的几个特殊分析相电流的形式,以及增加相数。