1329
Авто в Санкт-Петербурзі - оператор в Москві
Довго введення
15515659
У минулому ми протестували HD FPV з нашим улюбленим Віртурілом як відео-джерело. Після того, як тести показали, що все добре, перший погляд при контролінгу моделей досить реальний. Головне буде нормальний канал зв'язку. При вході HDMI для Virturilka в виробничому процесі (до речі, існує вже перший тестовий зразок, але водій ще не готовий), ми вирішили шукати більше варіантів організації каналу зв'язку. У коментарях було багато 4G гумору, тому ми думали, чому ні?
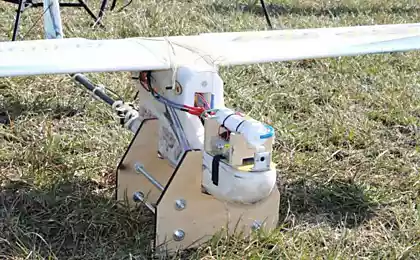
В цілому, на машині була встановлена Віртурілька (кількість, але вседержаний китайський креслень), підключений замість звичайного ресивера RC. Модем від неназв’язаної компанії застрягають у Віртурільці (але всім відомо, що це Йота). На борту Віртурілка є чотири регулярні канали PWM, тому він може відразу функціонувати як бортовий приймач RC для чотирьох каналів. Для управління машиною зазвичай потрібно всього два канали, тому навіть пошук можливий. Virturilka працює на сервері команди з пишним іменем, який я зробив останні кілька днів. М'яканка виявилася досить прохолодною, але я не опублікувати до тих пір, поки я очищаю деякі шоли (як без них).
На контрольному боці є додаток, що приймає сигнал від будь-якого вітру джойстик. Оскільки більшість додатків RC (контролювальне обладнання, дистанційне керування, коротко) має роз'єм тренера, ви можете підключити цю програму до комп'ютера за допомогою USB адаптера. В результаті апеляційний апарат бачить операційну систему як нормальний джойстик. До речі, під Linux все набагато простіше з точки зору програмування, але під Windows мені довелося дізнатися невідомий C#. Скоро, додаток .Net працює на контрольній стороні, яка обробляє зазначену джойстик і надсилає пакети до Віртурільки.
Так як у нашому випадку Віртурілька йде онлайн через Іота, питання виникало, як відправити команди до неї. Команди, що працюють на UDP (все рекомендується - тільки UDP, немає гальмівного TCP), і Yota не має білого іп. Білий ip може бути підключений для юридичної особи (400 рублів на місяць). Ми можемо підключитися, так як є юридична особа, але це не kosher на всіх. Так було спосіб надсилати команди на борту без білого IP. Цей метод відомий як UDP Hole Punching. Точно спрощена версія даного методу. Так як в цій темі я хочу показати результати випробувань, щоб говорити, для висівки, поставте деталі реалізації трохи, тому що я хочу додати повноцінний оболонковий отвір для будь-якого способу управління, і тепер вам потрібен білий ip на контрольному боці.
Я хотів би розповісти про тип управління. Так само Parrot ArDrone керується планшетом / смартфоном. Наші пристрої (які засновані на Virturilka) багато контролюються з планшета / смартфону. Але це не означає, що керівництво добре. По-перше, це найгірше управління. При контролінгу чого потрібно відчути контроль, щоб подивитися тільки на картинці з камери і не подумайте «Чи не вдарив віртуальну джойстику з пальцем». Так що немає нічого кращого, ніж нормальна рінапа. Прийміть, що USB рульове колесо / педаль, вони також підтримуються м'яким м'яким (звичайно це просто звичайний джойстик). Для верстата це рульове колесо і тумбочки, які найбільш нішу.
Як це робиться.
Зараз на бізнес. Вчора вранці я закінчив написання цього командного сервера (який працює на Virturilka), спробував його, здивував, що він працює. Я розповідав колегам, і я збираюсь на ліжко. У той же час, як перший тестер був одним колегою. Я не можу піти на ліжко, мені довелося одягатися і переміщатися з машиною зовні. Я був слідом за автомобілем і колегою, керуючись ним з Петро. У мене немає дуже хорошого сигналу Yota, тому про це повідомляється колега (на телефоні Skype), що йде відео, але часто крихти. Телеметрія з боку (через канал телеметрії, кермовий круг дається напругою акумулятора і параметри сигналу Yota) показали, що сигнал дійсно лоусний. Але автомобіль був рухомий, відео поганий.
Вимова відео. Після тестування HD відео в роздільній здатності 1280x720 немає бажання повернутися до звичайного 640x480, тому всі тести проводяться в HD. Для Yota бітрейт знизився на один мегабіт, але навіть з одним мегабітом, 720p виглядає краще, ніж 640x480.
Зроблено результат, колега побігла в найближчий магазин хобі і купила там же креветка. Підключаючи віртуріл з тестовою прошивкою до неї, справа п'яти хвилин. І я захоплюся комп'ютером і спробував стікер.
Виявилося, що в Санкт-Петербурзі хоча б в одній спальній зоні (це не входить в відео) і в центрі Іота працює набагато краще, ніж мій будинок в Москві. Так мені не було проблем водіння машинкою, сидячи на стільці шість сотень кілометрів від :- Затримка зовсім не відчувається, відео не розсипається, просто все ідеально.
Тож Реалізатор пішов з креветкою на площі палацу. Якщо ви в цікавому місці :- Щоб збільшити бітрейт відео, якось не думав, хоча є чітке постачання. Так всі поїздки пішли з потоку 1 mb / s. Спочатку я боївся йти швидко, але незабаром я звикла до неї і почала бракувати швидкості кірки. З таким великим відео ви можете приїхати набагато швидше. Але ще немає інших автомобілів, тому принаймні щось.
Ось що сталося. Тести були випадковими, тому ми зняли, що нам довелося. Навіть запис потоку, який працює нормально під лінух, під вітром, так як він вийшов, не світиться, потрібно робити по-різному. Я мав записувати регулярну веб-камеру з екрана, плюс вигляд з боку мене, goproh записаний.
Ну, відео.
Як я писав вище, сервер команд і додаток вітрове скло буде опублікувати другий день, коли я фіксую маленькі блискітки. Приходьте на форум, все буде там. Але опис командного сервера, можливо, витягнеться на окрему вершину на Habre.
П.С. По-перше, я не чекаю, щоб працювати так добре. Я думав, принаймні в Пітері. Я використовую для керма різними речами, але їздити по площі Палацу і Невський, сидячи в домашніх умовах в Москві було дуже класно. І найголовніше - все на базі нашого мозочка - Віртурілка :-
Джерело: habrahabr.ru/company/virt2real/blog/223145/
15515659
У минулому ми протестували HD FPV з нашим улюбленим Віртурілом як відео-джерело. Після того, як тести показали, що все добре, перший погляд при контролінгу моделей досить реальний. Головне буде нормальний канал зв'язку. При вході HDMI для Virturilka в виробничому процесі (до речі, існує вже перший тестовий зразок, але водій ще не готовий), ми вирішили шукати більше варіантів організації каналу зв'язку. У коментарях було багато 4G гумору, тому ми думали, чому ні?
В цілому, на машині була встановлена Віртурілька (кількість, але вседержаний китайський креслень), підключений замість звичайного ресивера RC. Модем від неназв’язаної компанії застрягають у Віртурільці (але всім відомо, що це Йота). На борту Віртурілка є чотири регулярні канали PWM, тому він може відразу функціонувати як бортовий приймач RC для чотирьох каналів. Для управління машиною зазвичай потрібно всього два канали, тому навіть пошук можливий. Virturilka працює на сервері команди з пишним іменем, який я зробив останні кілька днів. М'яканка виявилася досить прохолодною, але я не опублікувати до тих пір, поки я очищаю деякі шоли (як без них).
На контрольному боці є додаток, що приймає сигнал від будь-якого вітру джойстик. Оскільки більшість додатків RC (контролювальне обладнання, дистанційне керування, коротко) має роз'єм тренера, ви можете підключити цю програму до комп'ютера за допомогою USB адаптера. В результаті апеляційний апарат бачить операційну систему як нормальний джойстик. До речі, під Linux все набагато простіше з точки зору програмування, але під Windows мені довелося дізнатися невідомий C#. Скоро, додаток .Net працює на контрольній стороні, яка обробляє зазначену джойстик і надсилає пакети до Віртурільки.
Так як у нашому випадку Віртурілька йде онлайн через Іота, питання виникало, як відправити команди до неї. Команди, що працюють на UDP (все рекомендується - тільки UDP, немає гальмівного TCP), і Yota не має білого іп. Білий ip може бути підключений для юридичної особи (400 рублів на місяць). Ми можемо підключитися, так як є юридична особа, але це не kosher на всіх. Так було спосіб надсилати команди на борту без білого IP. Цей метод відомий як UDP Hole Punching. Точно спрощена версія даного методу. Так як в цій темі я хочу показати результати випробувань, щоб говорити, для висівки, поставте деталі реалізації трохи, тому що я хочу додати повноцінний оболонковий отвір для будь-якого способу управління, і тепер вам потрібен білий ip на контрольному боці.
Я хотів би розповісти про тип управління. Так само Parrot ArDrone керується планшетом / смартфоном. Наші пристрої (які засновані на Virturilka) багато контролюються з планшета / смартфону. Але це не означає, що керівництво добре. По-перше, це найгірше управління. При контролінгу чого потрібно відчути контроль, щоб подивитися тільки на картинці з камери і не подумайте «Чи не вдарив віртуальну джойстику з пальцем». Так що немає нічого кращого, ніж нормальна рінапа. Прийміть, що USB рульове колесо / педаль, вони також підтримуються м'яким м'яким (звичайно це просто звичайний джойстик). Для верстата це рульове колесо і тумбочки, які найбільш нішу.
Як це робиться.
Зараз на бізнес. Вчора вранці я закінчив написання цього командного сервера (який працює на Virturilka), спробував його, здивував, що він працює. Я розповідав колегам, і я збираюсь на ліжко. У той же час, як перший тестер був одним колегою. Я не можу піти на ліжко, мені довелося одягатися і переміщатися з машиною зовні. Я був слідом за автомобілем і колегою, керуючись ним з Петро. У мене немає дуже хорошого сигналу Yota, тому про це повідомляється колега (на телефоні Skype), що йде відео, але часто крихти. Телеметрія з боку (через канал телеметрії, кермовий круг дається напругою акумулятора і параметри сигналу Yota) показали, що сигнал дійсно лоусний. Але автомобіль був рухомий, відео поганий.
Вимова відео. Після тестування HD відео в роздільній здатності 1280x720 немає бажання повернутися до звичайного 640x480, тому всі тести проводяться в HD. Для Yota бітрейт знизився на один мегабіт, але навіть з одним мегабітом, 720p виглядає краще, ніж 640x480.
Зроблено результат, колега побігла в найближчий магазин хобі і купила там же креветка. Підключаючи віртуріл з тестовою прошивкою до неї, справа п'яти хвилин. І я захоплюся комп'ютером і спробував стікер.
Виявилося, що в Санкт-Петербурзі хоча б в одній спальній зоні (це не входить в відео) і в центрі Іота працює набагато краще, ніж мій будинок в Москві. Так мені не було проблем водіння машинкою, сидячи на стільці шість сотень кілометрів від :- Затримка зовсім не відчувається, відео не розсипається, просто все ідеально.
Тож Реалізатор пішов з креветкою на площі палацу. Якщо ви в цікавому місці :- Щоб збільшити бітрейт відео, якось не думав, хоча є чітке постачання. Так всі поїздки пішли з потоку 1 mb / s. Спочатку я боївся йти швидко, але незабаром я звикла до неї і почала бракувати швидкості кірки. З таким великим відео ви можете приїхати набагато швидше. Але ще немає інших автомобілів, тому принаймні щось.
Ось що сталося. Тести були випадковими, тому ми зняли, що нам довелося. Навіть запис потоку, який працює нормально під лінух, під вітром, так як він вийшов, не світиться, потрібно робити по-різному. Я мав записувати регулярну веб-камеру з екрана, плюс вигляд з боку мене, goproh записаний.
Ну, відео.
Як я писав вище, сервер команд і додаток вітрове скло буде опублікувати другий день, коли я фіксую маленькі блискітки. Приходьте на форум, все буде там. Але опис командного сервера, можливо, витягнеться на окрему вершину на Habre.
П.С. По-перше, я не чекаю, щоб працювати так добре. Я думав, принаймні в Пітері. Я використовую для керма різними речами, але їздити по площі Палацу і Невський, сидячи в домашніх умовах в Москві було дуже класно. І найголовніше - все на базі нашого мозочка - Віртурілка :-
Джерело: habrahabr.ru/company/virt2real/blog/223145/



















ANTVR: цікавий конкурент Oculululs Rift з гібридним контролером
Skylock - бездротовий велосипедний замок на сонячних батареях