1117
Високошвидкісний робочий маніпулятор
939980
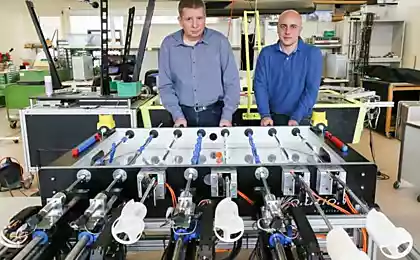
Група дослідників з Швейцарського державного технологічного інституту (Ecole polytechnique fédérale de Lausanne, EPFL) створила швидкісний робототехнічний маніпулятор, здатний зловити об'єкти, що кидаються в повітрі.
Система оцінює форму об'єкта, траєкторію його польоту і позицію в космосі в точці перетину.
 р.
р.
Родзинка проекту – це рухливість системи – перша, людина, переїзд маніпулятора до літаючого об’єкта, показує програму дуже грубою, приблизною схемою дії. Після цього проводиться самостійне «фінування» алгоритму. Ви можете побачити результат у відео.
На даний момент ця система має два основних недоліки:
(1) предмети не відстежуються безпосередньо від маніпулятора, але за допомогою декількох камер, розташованих в різних частинах приміщення.
(2) об'єкти будуть оснащені інфрачервоними маркерами для їх розпізнавання.
Джерело: habrahabr.ru/post/222599/
Група дослідників з Швейцарського державного технологічного інституту (Ecole polytechnique fédérale de Lausanne, EPFL) створила швидкісний робототехнічний маніпулятор, здатний зловити об'єкти, що кидаються в повітрі.
Система оцінює форму об'єкта, траєкторію його польоту і позицію в космосі в точці перетину.
 р.
р.Родзинка проекту – це рухливість системи – перша, людина, переїзд маніпулятора до літаючого об’єкта, показує програму дуже грубою, приблизною схемою дії. Після цього проводиться самостійне «фінування» алгоритму. Ви можете побачити результат у відео.
На даний момент ця система має два основних недоліки:
(1) предмети не відстежуються безпосередньо від маніпулятора, але за допомогою декількох камер, розташованих в різних частинах приміщення.
(2) об'єкти будуть оснащені інфрачервоними маркерами для їх розпізнавання.
Джерело: habrahabr.ru/post/222599/