Жизнь — интересная!
Подписывайтесь на нашу группу в Telegram и Facebook, чтобы быть в сообществе единомышленников, находить вдохновение и не пропускать свежие и удивительные статьи с bashny.net.
1116
0.3
2014-05-13
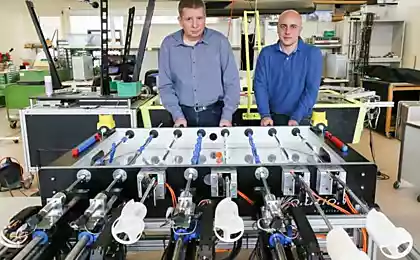
Высокоскоростной роботизированный манипулятор

Группа исследователей из Швейцарского Государственного Института Технологий (Ecole polytechnique fédérale de Lausanne, EPFL) создала высокоскоростной роботизированный манипулятор, способный ловить в воздухе предметы, которые ему кидают.
Система оценивает форму предмета, траекторию её полёта и положение в пространстве в точке перехвата.
Изюминкой проекта является обучаемость системы — сначала человек, двигая манипулятором в сторону летящего предмета, показывает программе очень грубую, примерную схему действий. После чего осуществляется самостоятельная «доводка» алгоритма. Результат вы можете наблюдать на видео.
На данный момент у этой системы есть два основных недостатка:
1) отслеживание предметов происходит не непосредственно с манипулятора, а с помощью нескольких камер, расположенных в разных частях комнаты.
2) предметы необходимо оснащать инфракрасными маркерами, чтобы камеры распознавали их.
Источник: habrahabr.ru/post/222599/
Портал БАШНЯ. Копирование, Перепечатка возможна при указании активной ссылки на данную страницу.