3183
解剖便宜的机器人吸尘器
良好的时间sutok.
今天研究内脏和机器人吸尘器Electros <预算的方案一href="http://www.agaitech.com.cn/ru/products_detail.aspx?mid_class=0&small_class=0&xs_class=90&psn=76">Agait EC MINI 的。
给出的原始算法,机器人可以被称为非常条件。
大量的文字,图片和采访的小吃。
当购买任何出乎其外得不行,虽然我感到惊喜 - 它的工作原理,甚至收集灰尘))
。 由于这种模式是最年轻的,不会讨论产品的功能“开箱即用”,并期待在范围rukoprkiladnichestva和升级。
我该设备被视为一个现成的平台,为DIY机器人清洁器。
当然,对于一个升级的第一候选人回避的大脑。
动力单元以启动可留可用,并作为控制器使用来自家族阿尔杜伊诺东西。
随着目前方案的植入应该是没有问题的,因为最初的版本采用的是微控制器<一href="http://www.emc.com.tw/twn/8bit_prod_dsc.asp?gid=&tid=000010&tt=8bit_gpiohi_ds&nn=GPIO+Type+MCU+Family+(High+EFT%2FESD+Level)">EM78P153K供电5V 14引脚封装(零下2 O电源)共12个针脚与计划通信。
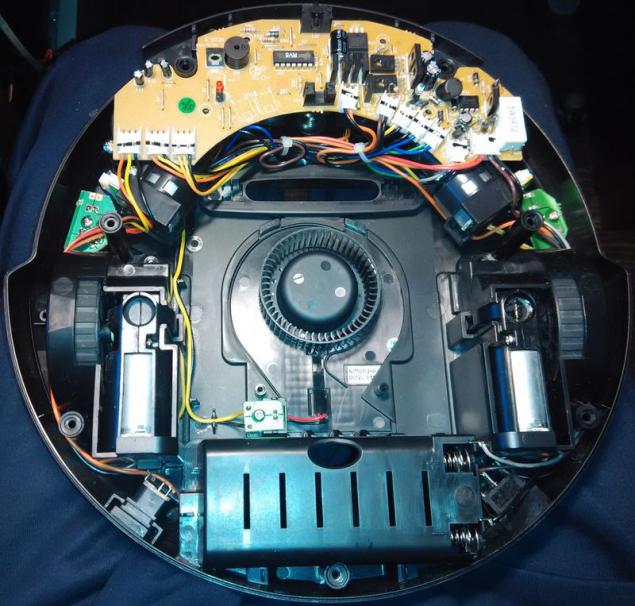
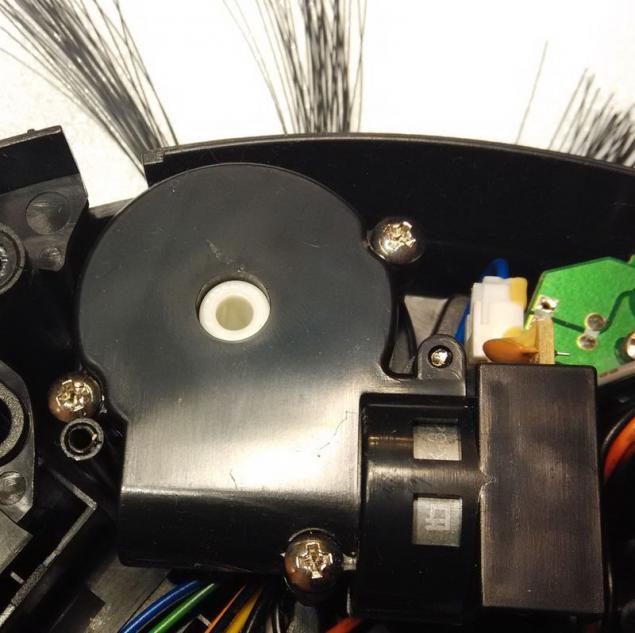
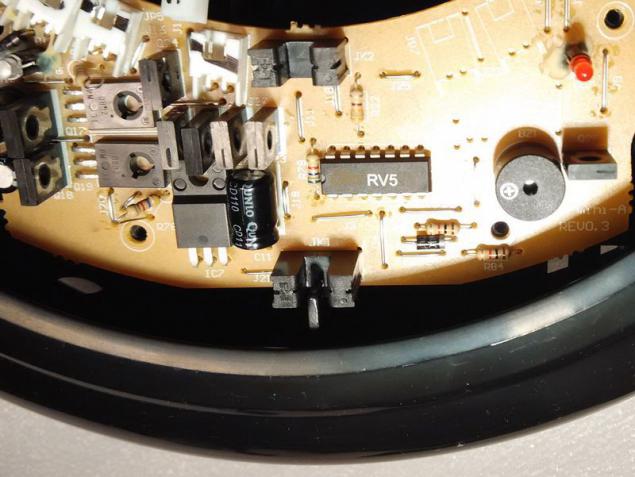
内脏的普遍看法 H4>
我们提供什么这个奇迹的制造商? H4> 充电器19V600毫安 B>
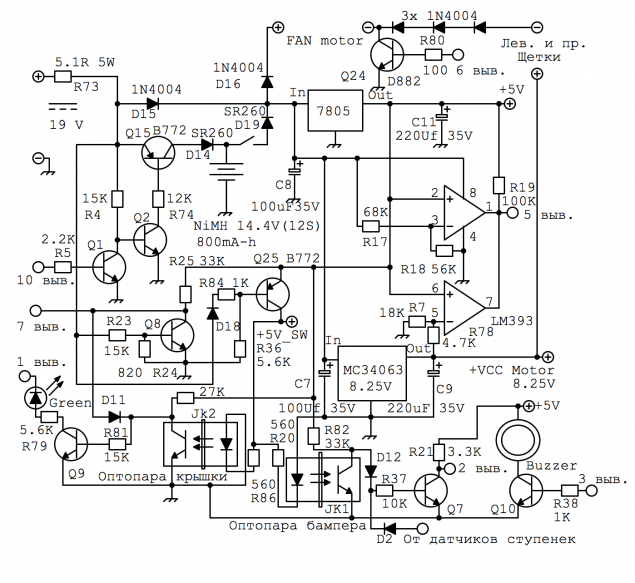
请看图 H4>从董事会驾校复制,所以有可能是不准确的。
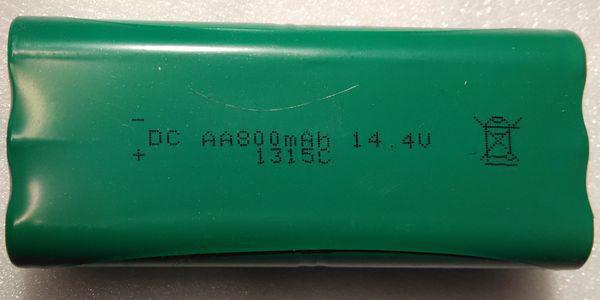
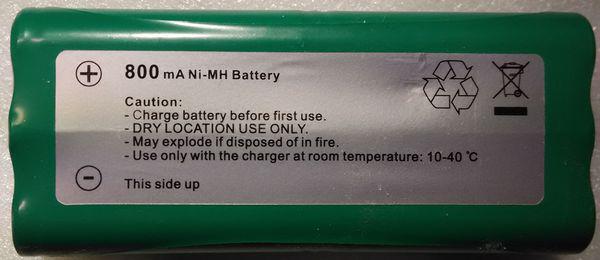
走在主要节点 H5> Q1,Q2,Q15此键为电池充电。注意,在这里它被充电的时候正好限制最大电流通过5瓦特电阻R73。是不是没有任何控制,使看的图我克隆你的电池充电的ΔVIMAX退休费用,寿命更长。
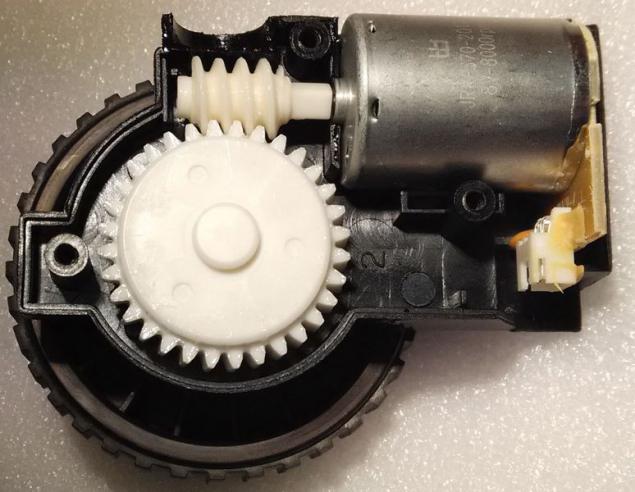
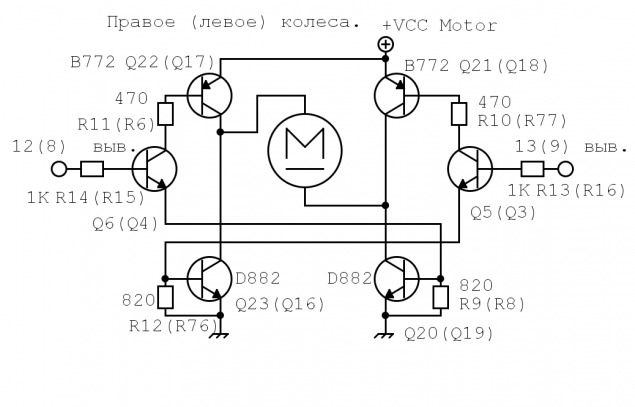
轮驱动电机 H4>
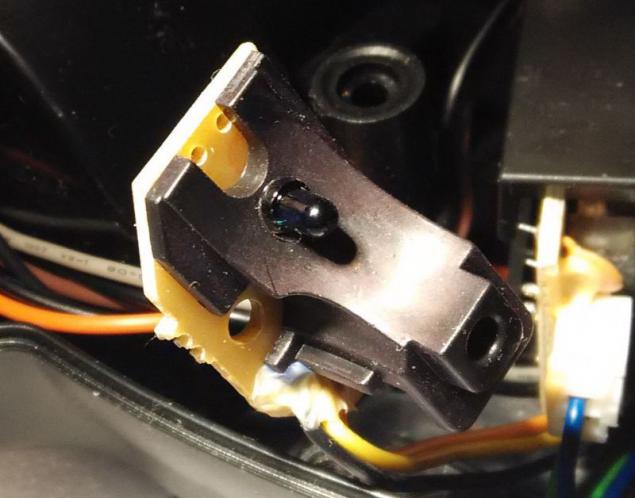
坠落下楼的传感器保护 H4>
的微控制器的腿 H4>在一个活跃0的情况下«摘要“将迎来。
结果 H4>在我看来,目前的方案中最重要的缺点是结合跳闸信号保险杠的传感器和下降,因此在目前遇到的算法更清洁的障碍时,感动“正确”简直是旋转180°,消失在他的另一面等几次沿相同的路径。因此,理想的是划分信号的障碍和地球»的“端部的更充分的反应。

今天研究内脏和机器人吸尘器Electros <预算的方案一href="http://www.agaitech.com.cn/ru/products_detail.aspx?mid_class=0&small_class=0&xs_class=90&psn=76">Agait EC MINI 的。
给出的原始算法,机器人可以被称为非常条件。
大量的文字,图片和采访的小吃。
当购买任何出乎其外得不行,虽然我感到惊喜 - 它的工作原理,甚至收集灰尘))
。 由于这种模式是最年轻的,不会讨论产品的功能“开箱即用”,并期待在范围rukoprkiladnichestva和升级。
我该设备被视为一个现成的平台,为DIY机器人清洁器。
当然,对于一个升级的第一候选人回避的大脑。
动力单元以启动可留可用,并作为控制器使用来自家族阿尔杜伊诺东西。
随着目前方案的植入应该是没有问题的,因为最初的版本采用的是微控制器<一href="http://www.emc.com.tw/twn/8bit_prod_dsc.asp?gid=&tid=000010&tt=8bit_gpiohi_ds&nn=GPIO+Type+MCU+Family+(High+EFT%2FESD+Level)">EM78P153K供电5V 14引脚封装(零下2 O电源)共12个针脚与计划通信。