957
Місільні дайвінгові човни.
Будь ласка, не порушуйте! Я не знаю.
Ідея була представлена особисто Генеральним секретарем Микитою Хрущовим. Обстеження швидкісних катерів проектів TsKB-19 та TsKB-5 на військовому підставі в Балаклаві та спостереження підводних човнів на основі там, він запропонував, щоб забезпечити крадіжку дій флоту, що особливо важливо в умовах ядерної війни (і це було прийнято вважати досить реальним), варто прагнути «підмержати» автопарку під водою, і запропоновано «підземити» ракетним катером для початку. Згідно з ним, виявилося, що як чудово це буде, якщо ракетні кораблі з'являються під водою перед ворогом, удари і відриваються від переслідувань на великій швидкості, використовуючи гідрофольги або так само, як ефектно зникнуть під водою.
11 зображень.
Проведено розробку проекту 1231 стрілецького змивання ракетного корабля до Центрального конструкторського бюро-19 Державного комітету Ради Міністрів СРСР з суднобудування. Головний дизайнер – начальник бюро Ігор Костецький. Ленінградський морський завод переведено в розвиток проекту ЦКБ-19 як експериментально-будівельна база Центрального конструкторського бюро. Проект відігравав важливу роль в організаційному об’єднанні проектних сил ТСКБ-19 та ЦКБ-5 в одному бюро, пізніше називають Центральним морським бюро «Дямонд». У зв’язку з об’єднанням двох конструкторських бюро, головним дизайнером проекту 1231 р. був голова КБ-5 Євген Юхнін.
Проектування такого незвичайного корабля стало складним завданням, що свідчить про те, як прогресу роботи, так і велику кількість проміжних етапів проектування, що завершилася технічним дизайном експериментального корабля і макетом основних приміщень. Поєднання вимог до конфліктів для наземних суден та підводних човнів в одному об’єкті, що вимагає великої неоднорідності та значних зусиль. До вищезазначеного слід додавати, що дизайн був проведений в конструкторському бюро човна, фахівці якого змушені були освоїти методи проектування підводних човнів.
Ключ до оформлення будь-якої бородавки – це передбачувана тактика його бойового використання. На жаль, не можна сказати, що тактика використання миючого ракетного носія спочатку була всебічно опрацьована з урахуванням можливих дій передбачуваного ворога і що TTZ для проектування ракетного носія було досить виправдано. Більш ретельне дослідження цієї тактики на основі технічних характеристик, складу та можливостей зброї, отриманих під час проектування, показали, що втрати суден цього проекту в умовах бойових дій не будуть нижчими від втрат швидкісних ракетних катерів, які були в обслуговуванні з ВМС в той час. У той же час завдяки високій вартості мийки ракетних носіїв у порівнянні з традиційним військовим-економічним ефектом їх використання здавалося б сумнівним.
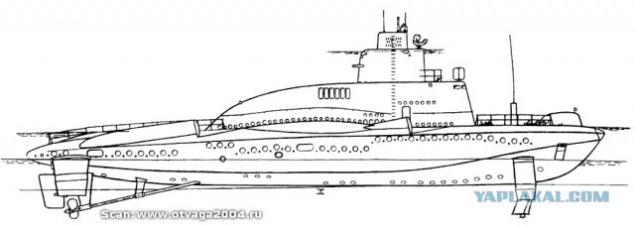
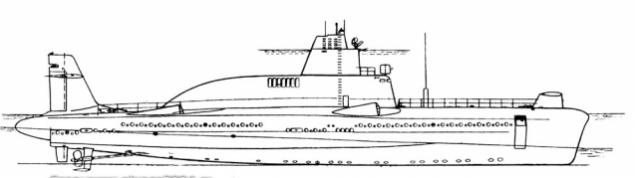 Габаритний зображення
Габаритний зображення
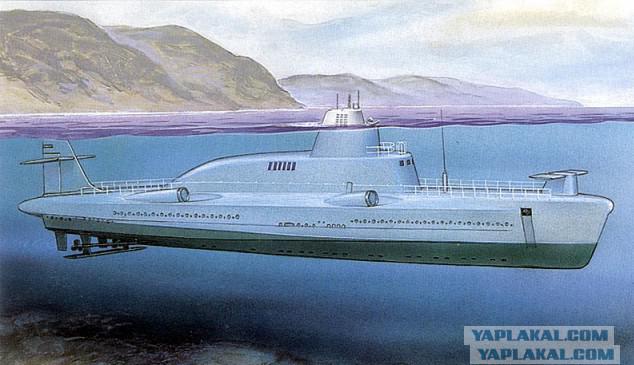
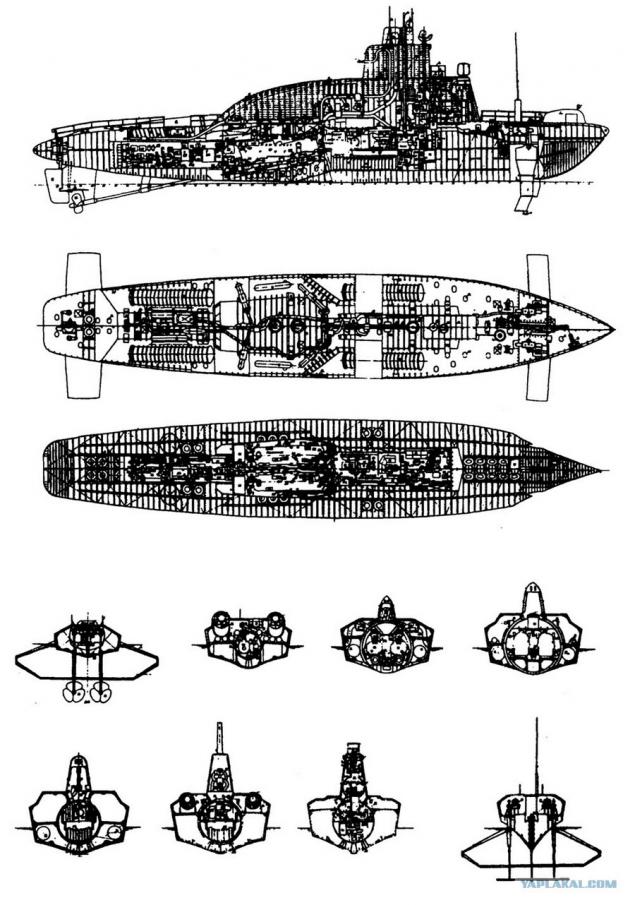
У відповідності з тактичним та технічним завданням корабель проекту 1231 був призначений для раптових ракетних ударів на бородавках та транспортах в вузькому просторі, на підходах до військово-морських баз та портів противника, участь у захисті берегів, районів флоту та приморських фланках земель, у відштовхуванні посадок та порушенні ворожих військово-морських комунікацій, а також для проведення сонару та радіолокаційної патрульної патрульної зони в зонах розсіяного флоту. Припустимо, що при вирішенні цих завдань група таких кораблів повинна бути розгорнута в даній області і тривалий час бути в занурюваному положенні в положенні очікування або підходити до противника також в підводному положенні, зберігаючи контакт з його синаром. Підіймаючись, ракетні носії, на високій швидкості досягали лінії ракетно-летових свердловин, вогнетривкі ракети, після чого знову занурюють або знялися від ворога на максимальній швидкості в поверхневому положенні. Присутність ракетних носіїв в зануреному положенні і висока швидкість під час атаки знизили час, що вони були під впливом вогню противника, в тому числі повітряної атаки зброї.
Для вирішення проблеми в процесі проектування корабля ми розглянемо велику кількість технічних рішень для всіх основних структурних компонентів. Арматура була радикально посилена у зв'язку з оригінальним набором (2 круїзних ракет). Так само можна сказати про радіолокаційні та гідроакустичні засоби. Ці заходи, згідно з оцінками, будуть занурювати втрати суден цього проекту у вирішенні бойових завдань.
Армамент складається з чотирьох П-25 круїзних ракет з діапазоном 40 км, розташованих в одиночних, некерованих, неортизованих контейнерних пускачів, розміщених в постійному куті нахилу до горизонту, з дистанційним керуванням з одного пульта дистанційного керування, розташованого в центральній частині судна. Запускники були поза твердим корпусом і ущільнювалися до максимального тиску глибини.
 р.
р.
З 1960 року в ОКБ-52 було проведено розробку антикорозійних ракет П-25 (комплекс 4К70). «виготовлена версія» РПК «Аметист» однойменного конструкторського бюро та з простою стартовою установкою, призначеною для озброєння човнів. З метою встановлення радіолокаційної або теплової ГОС.
РЛК «Рангаут-1231» забезпечує виявлення та визначення цільових координат в діапазоні 25-28 км. Гідроакустична станція "Харіус" в підводному положенні без руху дозволило виявити противника на відстані 60-120 км. Суд не мав ніяких засобів самозахисту, включаючи захист від повітряного атаки.
Слід зазначити, що для ефективного використання судна, недостатньо низку ракет і радіолокаторів, а також ефективності ГАЗ під час руху. Відсутність самозахисту значно підвищило ймовірність втрати суден. Також було зменшено ефективність при низькій швидкості та діапазоні підводного проходу та в режимі RDP (в експлуатації дизельних двигунів під водою). Крім того, глибина занурення була явно недостатньою для успішного захисту від PLO засобів.
При проектуванні судна, загальне розташування, кількість водонапірних відсіків, їх геометричні форми були багаторазово різноманітними (зокрема, були розглянуті варіанти розміщення кімнат в ізольованих контейнерах, зв'язок між якими було можливо тільки в поверхневому положенні, відсіки у вигляді горизонтальної «витягнутої» і т.д.). Нарешті, ми оселилися на двокутній версії в твердому тілі. У нісному відсіку був центральний пост, електрична електростанція, радіооператор і акустичні пости, акумуляторний піт і блоки. З цього відділення було здійснено всі контрольні роботи судна, двигунів, зброї, радіообладнання тощо. Другий відсік будинку основних і електродвигунів, дизельний генератор, гідравлічні насоси і т.д. У суперструктурі в окремому міцному контейнері був житловий відсік з спальними місцями на 6 осіб, жовчно- та поставками води та положень. У житловому відсіку також призначено для рятувального персоналу з підводного положення. При пошкодженні рятувальних робіт також можливо з центрального поста (проведення повинно бути вільним сходженням або за допомогою холепа). У суперструктурі з'явилася проникна коляска, вентиляційні та газові валу, антени.
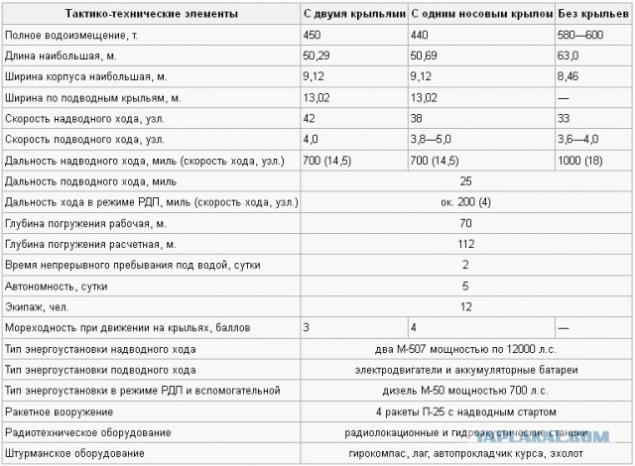
З моменту початку проектування корабля, принцип гідрофольгії був прийнятий як основний спосіб забезпечення високої швидкості в поверхневому положенні. Вивчено різні комбінації підводних крил і форм корпусу: від гостро-в'язового блиску до крильця човна. Форма корпусу та схеми підводних крилах були протестовані моделі в експериментальному басейні, на озері та в вітрових тунелях. Часовий процес оптимізації гідродинамічного макета завершується презентацією в технічному проекті трьох варіантів його технічного зовнішнього вигляду: з двома гідрофольгами, з однією крилом носа і взагалі без підводних крилах. Варіанти істотно відрізнялися в основних розмірах, зміщеннях і поверхневих швидкостях. Інші ключові технічні показники були приблизно рівні. Найбільш підходящим для подальшого розвитку став варіант з однією крилом носа. Незважаючи на нижню швидкість, характеристики балансування і керованості в підводному положенні були краще, ніж це з більш швидкого варіанту з двома гідрофольгами ( Особливістю закрилих варіантів є балансування і керованість корабля в вертикальній площині в підводному положенні шляхом перетворення цілого крила носа вздовж кута атаки).
В якості основних двигунів на різних стадіях проекту розглядаються газотурбіни з великими агрегатними потужностями і дизельними двигунами різних типів і кількістю, які не вимагають великих впускних шахт і мають менші розміри. Дизельний двигун M507, прийнятий для технічного проекту, був агрегатом двох послідовно освоєних дизельних двигунів M504. Для швидкого наплавлення корабля можна виводити основні баласти з вихлопними газами цих двигунів.
Під час проектування було проведено велику кількість розвідувальних досліджень, щоб знайти оптимальну схему передачі потужності до пропульсних двигунів під час курсу під водою і в режимі RDP, в тому числі з реверсивним електродвигуном «генератор-електричний двигун», з третім валом, кутовими редукторами, гідравлічними передачами, насосами та гідравлічними двигунами. Нарешті було обрано двокамерний блок з поверхневими дизельами та пропелиними електродвигунами для підводного проходу.
Електростанція була дуже складною і включала велику кількість механізмів і пристроїв. У зв’язку з технологічними роботами було близько 80 учасників системи дистанційного керування (з відповідною мережею зв’язку). Однак використання автоматичного управління допускається, зокрема, для контролю потужності корабля з центральної пошти без пошуку персоналу в відсіку двигуна.
Внутрішнє тіло було повністю зварене, використовуючи пресовані профілі та панелі. Тверде тіло відповідно до технічного проекту було три циліндричні оболонки. Крім того, середня частина корпусу відрізнялася від правильного циліндра звичайних підводних човнів і була парою декількох ізольованих корпусів.
Для крил були розглянуті різні алюмінієво-магнієві сплави та високоміцні сталі. Для тіла остаточно вибрав сплав AMG-61, для крил – титан. Твердий корпус корабля призначений для витримування навантажень, коли атомна бомба вибухнула в радіусі близько 2 км (для ряду інших систем і обладнання - 4 км).
Системи корабля були дуже складними. Система життєздатного дайвінгу та серфінгу включає в себе 29 вентиляційних клапанів та 54 люків. Але високотемпературне повітряне забезпечення здавалося недостатньою для аварійного корабля на поверхню.
Зняти проект в цілому, слід зазначити, що в ньому було знайдено ряд нових технічних рішень, зокрема: комбіновані контури корпусу для забезпечення якості водіння в поверхневому положенні і стабілізуючого руху в підводній воді; використання алюмінієво-магнієвого сплаву для корпусу (з товщинами до 40 мм), а для крилах - титану; незвичайний структурний дизайн міцного корпусу; використання нового, ще не працювала дизельними двигунами і срібно-зінковими батареями; використання автоматичного управління судном і обладнанням і розташування автоматичних елементів управління автоматичними крилами, полегшенням, бальзамом і читанням бальзаму.
При цьому необхідно зробити важливі відхилення від встановлених практик і стандартів проектування в суднобудуванні, в тому числі затягування загального місця розташування, відсутність доступу до певних важливих пристроїв, відмова від заходів щодо захисту судна і збереження джерела електроенергії, дублювання певних елементів електростанцій і суднових систем (в тому числі приводних систем наплавлення і занурення), перевантаження основних двигунів, коли корабель надходить на крила, обмежені запаси стійкості і зміщення, а ряд інших відступів. Обмеження на розмір і зміщення призвели до використання низки дрібних і легких моделей механізмів і обладнання, спеціальних систем і пристроїв, які ще не освоювали промисловість.

Складність і новинка створення миючого ракетного носія в майбутньому зазначила величезну кількість проектно-розробних робіт, в тому числі дослідження гідродинамічних характеристик корабля, експериментальне тестування корпусних і крилових конструкцій, розробка нових механізмів, фітингів та іншого обладнання, букмекерне тестування основних двигунів і механізмів передачі, автоматизації і систем тощо. (список необхідних робіт, визначених закінченням технічного проекту було близько 120 одиниць).
Поглиблення процесу проектування призвело до постійного збільшення маси корабля, збільшення електростанції та ін. Очевидно, що подальший розвиток проекту також неминуче буде супроводжуватися збільшенням зміщення і, отже, зниженням швидкості - характерною, яка визначається разом з секрецією, дуже сенсом створення корабля.
У січні 1959 р. розпочалася проектування ракетного перевізника і продовжується до кінця 1964 р., коли від’їзд Хрущовського з політичної сцени автоматично кладуть кінець до роботи, яка навряд чи може призвести до реального успіху, незважаючи на всі показання дизайнерів.
Тим не менш, Микола Хрущов не був автором ідеї створення бойових катерів. Перший проект такого корабля був запропонований Валерієм Брзезинським (1894-1985). У 1937 році цей головний військово-морський діяч і дизайнер потрапив в «Схарашка». Технічне бюро НКВД на заводі No 196 у Ленінграді. У 1939 р. було створено проект змивальної черепиці М-400 «Блока».
Згідно з проектом, судно з поверхневим зміщенням 35.3 тонн розробила швидкість 33 вузли, а під водою - 11 вузликів. (з зміщенням - 74 т). Він був озброєний двома трубами торпедо 450-мм і кулеметом. Електростанція - два дизельні двигуни, в підводному положенні, що працюють на закритому циклі. Передбачено, що підводний човен в підводному положенні був зануритися до ворога і вдарив йому торпедо, потім поверхні і при повній швидкості втечу від переслідувань силових сил.
«Flea» уклала на заводі А. Марті в 1939 році. На початку війни технічна готовність корабля склала близько 60%. У зв'язаному Ленінграді в 1942 році робота на човні була призупинена, а після того, як пошкодження отримано від обстрілу, вона була повністю зупинена і ніколи не відновила.
Ідея створення катерів, які можуть зануритися під водою під час життя. У вітчизняному та іноземному пресі є звіти про розвиток цього типу суден, однак, не так амбітні технічні характеристики як проект 1231 і призначені для цивільних потреб.
Так, державне невелике підприємство "Дельфін" ( Санкт-Петербург) наприкінці 1990-х років розробило проект поверхневого підводного човна. Його призначення – швидка доставка на територію континентальної полиці (в т.ч. із зануренням до 15 м) групи диверсів (до 6 осіб) з обладнанням, обладнанням та інструментами для проведення перевірок та ремонтних робіт. Катер має форму корпусу, що дозволяє розвивати високу швидкість поверхні (до 32 сучки), а також прийнятну обробку на 2-3 вузли. в підводному положенні. Основні елементи і характеристики човна: довжина - 6,6 м, ширина - 2,2 м, висота - 1,3 м, посухо - 0,6 м, зміщення, повні на поверхні / підводних посад - 4 / 4,4 тонн; поверхневий діапазон - 100 миль, підводний - 4-5 миль, морквадость - 4 точки. Два роторно-пірні двигуни потужністю 2-110 кВт забезпечують рух у поверхневому положенні за допомогою водних гармат. У луку човна є два пропелери для підводного проходу.
3610Р. 4200Р.
Санкт-Петербурзький морський бюро машинобудування "Малахіт" створив проект дайвінг- яхти, здатний дайвінг на глибину 50-100 м. Основні елементи і характеристики: довжина - 30, ширина - 5, проект - 4.8 м, зміщення - близько 300 тонн, швидкість поверхні - 8 вузликів, підводний - 3 вузли, екіпаж - 4 чол. У трьох комфортабельних салонах, обладнаних підводними вікнами (800х800 мм). З відповідною модифікацією яхту можна використовувати як екскурсію на 40 осіб або для досліджень.
594580р.
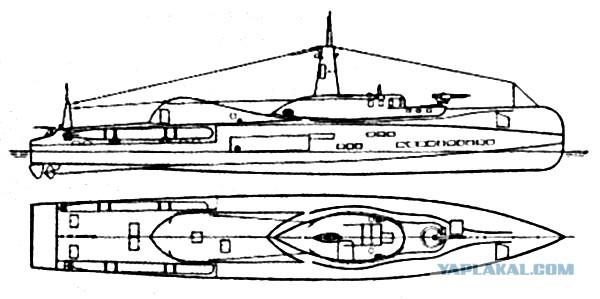
І з дуже "свіжим" представником цієї екзотичної сім'ї - "сучасний фрегат" SSX-25, запропонованих французьким концерном DCNS в 2010 році.
Всі

Джерело:
Ідея була представлена особисто Генеральним секретарем Микитою Хрущовим. Обстеження швидкісних катерів проектів TsKB-19 та TsKB-5 на військовому підставі в Балаклаві та спостереження підводних човнів на основі там, він запропонував, щоб забезпечити крадіжку дій флоту, що особливо важливо в умовах ядерної війни (і це було прийнято вважати досить реальним), варто прагнути «підмержати» автопарку під водою, і запропоновано «підземити» ракетним катером для початку. Згідно з ним, виявилося, що як чудово це буде, якщо ракетні кораблі з'являються під водою перед ворогом, удари і відриваються від переслідувань на великій швидкості, використовуючи гідрофольги або так само, як ефектно зникнуть під водою.
11 зображень.

Проведено розробку проекту 1231 стрілецького змивання ракетного корабля до Центрального конструкторського бюро-19 Державного комітету Ради Міністрів СРСР з суднобудування. Головний дизайнер – начальник бюро Ігор Костецький. Ленінградський морський завод переведено в розвиток проекту ЦКБ-19 як експериментально-будівельна база Центрального конструкторського бюро. Проект відігравав важливу роль в організаційному об’єднанні проектних сил ТСКБ-19 та ЦКБ-5 в одному бюро, пізніше називають Центральним морським бюро «Дямонд». У зв’язку з об’єднанням двох конструкторських бюро, головним дизайнером проекту 1231 р. був голова КБ-5 Євген Юхнін.
Проектування такого незвичайного корабля стало складним завданням, що свідчить про те, як прогресу роботи, так і велику кількість проміжних етапів проектування, що завершилася технічним дизайном експериментального корабля і макетом основних приміщень. Поєднання вимог до конфліктів для наземних суден та підводних човнів в одному об’єкті, що вимагає великої неоднорідності та значних зусиль. До вищезазначеного слід додавати, що дизайн був проведений в конструкторському бюро човна, фахівці якого змушені були освоїти методи проектування підводних човнів.
Ключ до оформлення будь-якої бородавки – це передбачувана тактика його бойового використання. На жаль, не можна сказати, що тактика використання миючого ракетного носія спочатку була всебічно опрацьована з урахуванням можливих дій передбачуваного ворога і що TTZ для проектування ракетного носія було досить виправдано. Більш ретельне дослідження цієї тактики на основі технічних характеристик, складу та можливостей зброї, отриманих під час проектування, показали, що втрати суден цього проекту в умовах бойових дій не будуть нижчими від втрат швидкісних ракетних катерів, які були в обслуговуванні з ВМС в той час. У той же час завдяки високій вартості мийки ракетних носіїв у порівнянні з традиційним військовим-економічним ефектом їх використання здавалося б сумнівним.
 Габаритний зображення
Габаритний зображенняУ відповідності з тактичним та технічним завданням корабель проекту 1231 був призначений для раптових ракетних ударів на бородавках та транспортах в вузькому просторі, на підходах до військово-морських баз та портів противника, участь у захисті берегів, районів флоту та приморських фланках земель, у відштовхуванні посадок та порушенні ворожих військово-морських комунікацій, а також для проведення сонару та радіолокаційної патрульної патрульної зони в зонах розсіяного флоту. Припустимо, що при вирішенні цих завдань група таких кораблів повинна бути розгорнута в даній області і тривалий час бути в занурюваному положенні в положенні очікування або підходити до противника також в підводному положенні, зберігаючи контакт з його синаром. Підіймаючись, ракетні носії, на високій швидкості досягали лінії ракетно-летових свердловин, вогнетривкі ракети, після чого знову занурюють або знялися від ворога на максимальній швидкості в поверхневому положенні. Присутність ракетних носіїв в зануреному положенні і висока швидкість під час атаки знизили час, що вони були під впливом вогню противника, в тому числі повітряної атаки зброї.
Для вирішення проблеми в процесі проектування корабля ми розглянемо велику кількість технічних рішень для всіх основних структурних компонентів. Арматура була радикально посилена у зв'язку з оригінальним набором (2 круїзних ракет). Так само можна сказати про радіолокаційні та гідроакустичні засоби. Ці заходи, згідно з оцінками, будуть занурювати втрати суден цього проекту у вирішенні бойових завдань.
Армамент складається з чотирьох П-25 круїзних ракет з діапазоном 40 км, розташованих в одиночних, некерованих, неортизованих контейнерних пускачів, розміщених в постійному куті нахилу до горизонту, з дистанційним керуванням з одного пульта дистанційного керування, розташованого в центральній частині судна. Запускники були поза твердим корпусом і ущільнювалися до максимального тиску глибини.
 р.
р.З 1960 року в ОКБ-52 було проведено розробку антикорозійних ракет П-25 (комплекс 4К70). «виготовлена версія» РПК «Аметист» однойменного конструкторського бюро та з простою стартовою установкою, призначеною для озброєння човнів. З метою встановлення радіолокаційної або теплової ГОС.
РЛК «Рангаут-1231» забезпечує виявлення та визначення цільових координат в діапазоні 25-28 км. Гідроакустична станція "Харіус" в підводному положенні без руху дозволило виявити противника на відстані 60-120 км. Суд не мав ніяких засобів самозахисту, включаючи захист від повітряного атаки.
Слід зазначити, що для ефективного використання судна, недостатньо низку ракет і радіолокаторів, а також ефективності ГАЗ під час руху. Відсутність самозахисту значно підвищило ймовірність втрати суден. Також було зменшено ефективність при низькій швидкості та діапазоні підводного проходу та в режимі RDP (в експлуатації дизельних двигунів під водою). Крім того, глибина занурення була явно недостатньою для успішного захисту від PLO засобів.
При проектуванні судна, загальне розташування, кількість водонапірних відсіків, їх геометричні форми були багаторазово різноманітними (зокрема, були розглянуті варіанти розміщення кімнат в ізольованих контейнерах, зв'язок між якими було можливо тільки в поверхневому положенні, відсіки у вигляді горизонтальної «витягнутої» і т.д.). Нарешті, ми оселилися на двокутній версії в твердому тілі. У нісному відсіку був центральний пост, електрична електростанція, радіооператор і акустичні пости, акумуляторний піт і блоки. З цього відділення було здійснено всі контрольні роботи судна, двигунів, зброї, радіообладнання тощо. Другий відсік будинку основних і електродвигунів, дизельний генератор, гідравлічні насоси і т.д. У суперструктурі в окремому міцному контейнері був житловий відсік з спальними місцями на 6 осіб, жовчно- та поставками води та положень. У житловому відсіку також призначено для рятувального персоналу з підводного положення. При пошкодженні рятувальних робіт також можливо з центрального поста (проведення повинно бути вільним сходженням або за допомогою холепа). У суперструктурі з'явилася проникна коляска, вентиляційні та газові валу, антени.

З моменту початку проектування корабля, принцип гідрофольгії був прийнятий як основний спосіб забезпечення високої швидкості в поверхневому положенні. Вивчено різні комбінації підводних крил і форм корпусу: від гостро-в'язового блиску до крильця човна. Форма корпусу та схеми підводних крилах були протестовані моделі в експериментальному басейні, на озері та в вітрових тунелях. Часовий процес оптимізації гідродинамічного макета завершується презентацією в технічному проекті трьох варіантів його технічного зовнішнього вигляду: з двома гідрофольгами, з однією крилом носа і взагалі без підводних крилах. Варіанти істотно відрізнялися в основних розмірах, зміщеннях і поверхневих швидкостях. Інші ключові технічні показники були приблизно рівні. Найбільш підходящим для подальшого розвитку став варіант з однією крилом носа. Незважаючи на нижню швидкість, характеристики балансування і керованості в підводному положенні були краще, ніж це з більш швидкого варіанту з двома гідрофольгами ( Особливістю закрилих варіантів є балансування і керованість корабля в вертикальній площині в підводному положенні шляхом перетворення цілого крила носа вздовж кута атаки).
В якості основних двигунів на різних стадіях проекту розглядаються газотурбіни з великими агрегатними потужностями і дизельними двигунами різних типів і кількістю, які не вимагають великих впускних шахт і мають менші розміри. Дизельний двигун M507, прийнятий для технічного проекту, був агрегатом двох послідовно освоєних дизельних двигунів M504. Для швидкого наплавлення корабля можна виводити основні баласти з вихлопними газами цих двигунів.
Під час проектування було проведено велику кількість розвідувальних досліджень, щоб знайти оптимальну схему передачі потужності до пропульсних двигунів під час курсу під водою і в режимі RDP, в тому числі з реверсивним електродвигуном «генератор-електричний двигун», з третім валом, кутовими редукторами, гідравлічними передачами, насосами та гідравлічними двигунами. Нарешті було обрано двокамерний блок з поверхневими дизельами та пропелиними електродвигунами для підводного проходу.

Електростанція була дуже складною і включала велику кількість механізмів і пристроїв. У зв’язку з технологічними роботами було близько 80 учасників системи дистанційного керування (з відповідною мережею зв’язку). Однак використання автоматичного управління допускається, зокрема, для контролю потужності корабля з центральної пошти без пошуку персоналу в відсіку двигуна.
Внутрішнє тіло було повністю зварене, використовуючи пресовані профілі та панелі. Тверде тіло відповідно до технічного проекту було три циліндричні оболонки. Крім того, середня частина корпусу відрізнялася від правильного циліндра звичайних підводних човнів і була парою декількох ізольованих корпусів.
Для крил були розглянуті різні алюмінієво-магнієві сплави та високоміцні сталі. Для тіла остаточно вибрав сплав AMG-61, для крил – титан. Твердий корпус корабля призначений для витримування навантажень, коли атомна бомба вибухнула в радіусі близько 2 км (для ряду інших систем і обладнання - 4 км).
Системи корабля були дуже складними. Система життєздатного дайвінгу та серфінгу включає в себе 29 вентиляційних клапанів та 54 люків. Але високотемпературне повітряне забезпечення здавалося недостатньою для аварійного корабля на поверхню.
Зняти проект в цілому, слід зазначити, що в ньому було знайдено ряд нових технічних рішень, зокрема: комбіновані контури корпусу для забезпечення якості водіння в поверхневому положенні і стабілізуючого руху в підводній воді; використання алюмінієво-магнієвого сплаву для корпусу (з товщинами до 40 мм), а для крилах - титану; незвичайний структурний дизайн міцного корпусу; використання нового, ще не працювала дизельними двигунами і срібно-зінковими батареями; використання автоматичного управління судном і обладнанням і розташування автоматичних елементів управління автоматичними крилами, полегшенням, бальзамом і читанням бальзаму.
При цьому необхідно зробити важливі відхилення від встановлених практик і стандартів проектування в суднобудуванні, в тому числі затягування загального місця розташування, відсутність доступу до певних важливих пристроїв, відмова від заходів щодо захисту судна і збереження джерела електроенергії, дублювання певних елементів електростанцій і суднових систем (в тому числі приводних систем наплавлення і занурення), перевантаження основних двигунів, коли корабель надходить на крила, обмежені запаси стійкості і зміщення, а ряд інших відступів. Обмеження на розмір і зміщення призвели до використання низки дрібних і легких моделей механізмів і обладнання, спеціальних систем і пристроїв, які ще не освоювали промисловість.

Складність і новинка створення миючого ракетного носія в майбутньому зазначила величезну кількість проектно-розробних робіт, в тому числі дослідження гідродинамічних характеристик корабля, експериментальне тестування корпусних і крилових конструкцій, розробка нових механізмів, фітингів та іншого обладнання, букмекерне тестування основних двигунів і механізмів передачі, автоматизації і систем тощо. (список необхідних робіт, визначених закінченням технічного проекту було близько 120 одиниць).
Поглиблення процесу проектування призвело до постійного збільшення маси корабля, збільшення електростанції та ін. Очевидно, що подальший розвиток проекту також неминуче буде супроводжуватися збільшенням зміщення і, отже, зниженням швидкості - характерною, яка визначається разом з секрецією, дуже сенсом створення корабля.
У січні 1959 р. розпочалася проектування ракетного перевізника і продовжується до кінця 1964 р., коли від’їзд Хрущовського з політичної сцени автоматично кладуть кінець до роботи, яка навряд чи може призвести до реального успіху, незважаючи на всі показання дизайнерів.

Тим не менш, Микола Хрущов не був автором ідеї створення бойових катерів. Перший проект такого корабля був запропонований Валерієм Брзезинським (1894-1985). У 1937 році цей головний військово-морський діяч і дизайнер потрапив в «Схарашка». Технічне бюро НКВД на заводі No 196 у Ленінграді. У 1939 р. було створено проект змивальної черепиці М-400 «Блока».

Згідно з проектом, судно з поверхневим зміщенням 35.3 тонн розробила швидкість 33 вузли, а під водою - 11 вузликів. (з зміщенням - 74 т). Він був озброєний двома трубами торпедо 450-мм і кулеметом. Електростанція - два дизельні двигуни, в підводному положенні, що працюють на закритому циклі. Передбачено, що підводний човен в підводному положенні був зануритися до ворога і вдарив йому торпедо, потім поверхні і при повній швидкості втечу від переслідувань силових сил.
«Flea» уклала на заводі А. Марті в 1939 році. На початку війни технічна готовність корабля склала близько 60%. У зв'язаному Ленінграді в 1942 році робота на човні була призупинена, а після того, як пошкодження отримано від обстрілу, вона була повністю зупинена і ніколи не відновила.
Ідея створення катерів, які можуть зануритися під водою під час життя. У вітчизняному та іноземному пресі є звіти про розвиток цього типу суден, однак, не так амбітні технічні характеристики як проект 1231 і призначені для цивільних потреб.
Так, державне невелике підприємство "Дельфін" ( Санкт-Петербург) наприкінці 1990-х років розробило проект поверхневого підводного човна. Його призначення – швидка доставка на територію континентальної полиці (в т.ч. із зануренням до 15 м) групи диверсів (до 6 осіб) з обладнанням, обладнанням та інструментами для проведення перевірок та ремонтних робіт. Катер має форму корпусу, що дозволяє розвивати високу швидкість поверхні (до 32 сучки), а також прийнятну обробку на 2-3 вузли. в підводному положенні. Основні елементи і характеристики човна: довжина - 6,6 м, ширина - 2,2 м, висота - 1,3 м, посухо - 0,6 м, зміщення, повні на поверхні / підводних посад - 4 / 4,4 тонн; поверхневий діапазон - 100 миль, підводний - 4-5 миль, морквадость - 4 точки. Два роторно-пірні двигуни потужністю 2-110 кВт забезпечують рух у поверхневому положенні за допомогою водних гармат. У луку човна є два пропелери для підводного проходу.
3610Р. 4200Р.
Санкт-Петербурзький морський бюро машинобудування "Малахіт" створив проект дайвінг- яхти, здатний дайвінг на глибину 50-100 м. Основні елементи і характеристики: довжина - 30, ширина - 5, проект - 4.8 м, зміщення - близько 300 тонн, швидкість поверхні - 8 вузликів, підводний - 3 вузли, екіпаж - 4 чол. У трьох комфортабельних салонах, обладнаних підводними вікнами (800х800 мм). З відповідною модифікацією яхту можна використовувати як екскурсію на 40 осіб або для досліджень.
594580р.
І з дуже "свіжим" представником цієї екзотичної сім'ї - "сучасний фрегат" SSX-25, запропонованих французьким концерном DCNS в 2010 році.
Всі

Джерело: