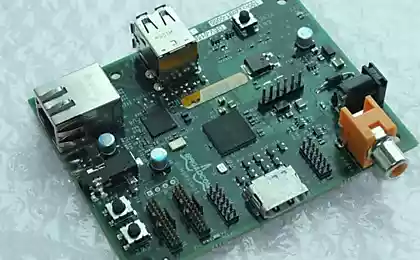
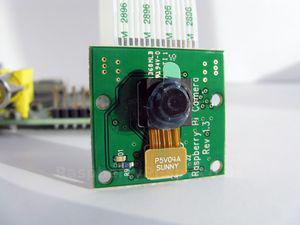
Raspberry Pi

|
Pi cámara
Para puente vayfay Probado Ubiquiti bala m2 hp

Este módulo vayfay grande para plataformas móviles como fácilmente alimentado a través del POE de la batería a bordo, suficiente para suministrar energía a los dos pares (7-24V, par azul + , un par de marrón - ), tiene un tamaño pequeño, tiene una buena potencia y el diseño industrial. Sólo un buen bono es 5,8 GHz en un factor de forma similar que le permite no cambiar el diseño de la plataforma para pasar a otra banda de frecuencias, simplemente reemplazando módulo vayfay y una antena.
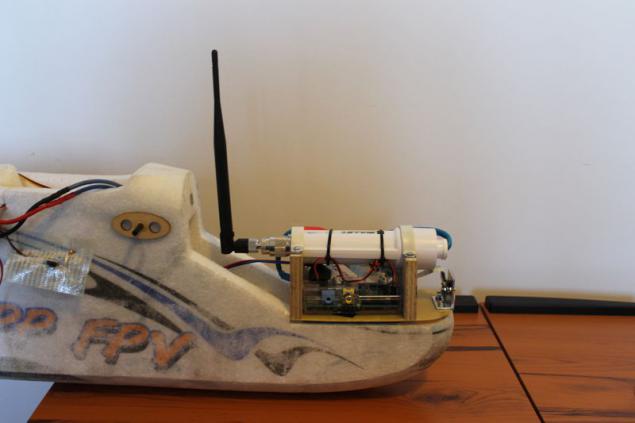
Como un EUT experimental medios locas ideas que hemos estado usando пенолет (Vuelo de espuma) adquirió en hobbikinge. En esta unidad, se practica casi todas las ideas emergentes relacionados con UAV.

Las ventajas de esta máquina - que es fácil de instalar el equipo necesario, la facilidad de pilotaje, la capacidad y la enorme capacidad de mantenimiento de elevación. La última característica más de una vez rescatado después del accidente, todo va a adhesivo epóxico, y nuestra penolet tren de nuevo listo para krashtestu volar.
Carga penoleta h4> 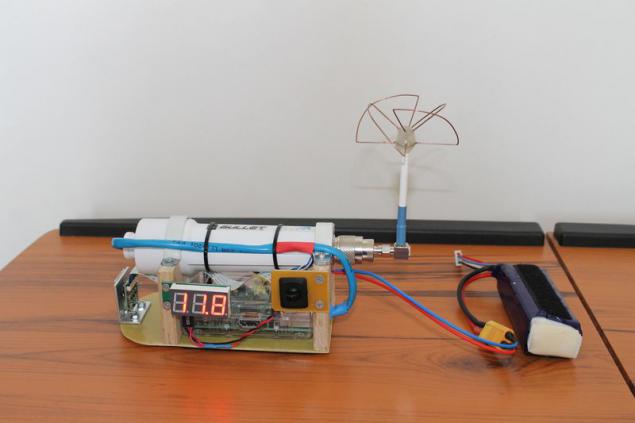
Cámara Frambuesa correr Raspbian Módulo vayfay con antena Indicador de Voltaje palanca principal li > frambuesa Alimentación Conecte la batería
Tierra h4> 



ordenador portátil con Ubuntu 12.04 LTS con parasol D Atena -Link ANT24-0801 Módulo vayfay módulo de alimentación de la batería Antenna fue seleccionado patrón general basado en 70 grados verticalmente y 70 grados horizontalmente.
Software h4> La emisión se llevó a cabo utilizando Gstreamer .
El primer punto importante. Hice contraparte software de configuración, para que gracias. Yo sólo doy utilizar una secuencia de comandos para iniciar la emisión de frambuesas y recepción de vídeo en el ordenador portátil.
general h5> raspivid -n -w 1280 -h 720 -b 4500000 -fps 30 -vf -hf -t 0 -o - | \ gst-lanza- 1.0 -v fdsrc! h264parse! config-intervalo rtph264pay = 10 pt = 96 $ udpsink host = 192.168.4.204 puerto = 9000 code> pre>
Tierra h5>
gst-lanzamiento-1.0 -v udpsrc port = 9000 caps = 'application / x-RTP, los medios de comunicación = (cadena) vídeo, velocidad de reloj = (int) 90000, codificación-name = (cadena) H264 '! rtph264depay! avdec_h264! videoconvert! sincronización autovideosink = false code> pre>
Aquí vamos ... h4> El segundo punto importante. Yo no soy un piloto. Penoletom Gestionado experimentado piloto, para que separarlo gracias. Verano, tenemos larga y exitosa en diferentes máquinas. En esta etapa, hablé como un refuerzo de partida.




... Llegado h4> de volar sucedieron exactamente tres veces desde Sin embargo, hemos sobrecargado el avión, de empuje en un pozo de la batería muy grande con la esperanza bien durante mucho tiempo para volar. Debido a esto, y así la máquina de baja velocidad era bastante torpe. Cuando aterrizaje no logró superar un viento lateral, la máquina cayó por las bandas y acarició en la tierra. Batería grande y pesado decidió salir y todavía escapado a la ligera reversión fuselaje espuma (sobre mantenimiento, escribí el epoxi haya secado, penolet tren blindado está dispuesto a luchar el vuelo). En general, el equipo no está dañado. Pero hay un resquicio de esperanza ... HD FPV WAS!


Eso es todo por lo que se inició!

HD FPV era ... pero eso no es muy lejos. En realidad las arreglamos para conseguir un vídeo sin el retraso en un área muy pequeña del campo.

Antena de látigo de acuerdo a su patrón de radiación (rosquilla horizontal) se comporta como ... látigo de la antena, es decir, a la altura y en un ángulo pronunciado / curvas cuando pétalo no alcanza la antena receptora de inicio se retrasa.
Vídeos con antena de látigo, escribieron desde la pantalla del monitor 15 fps ... alguna imagen de lo que está sucediendo da.
En el futuro, permitirá la grabación directa de la corriente recibida.
Antena "trébol" tiene un patrón de radiación esférica, pero no una muy alta gama para nuestro canal, por lo que el "lejano" se extiende también a salir el rastrillo en la imagen. Desafortunadamente, no hay vídeo.
Después de aplastar a cabo dos pasos campaña a través del campo con diferentes antenas y como dicen, un poco de resultado previsible: la gama es pobre, la antena de látigo trabaja un poco más a 300-400 metros, si el plano del pétalo (rosquilla) golpea la antena receptora, "trébol" puede girar como quieras, pero ya las emisiones a todos los lados por igual rango es incluso más pequeño que el "pin" a 300 metros.
Conclusión h4> Volar HD FPV - esta es la realidad! CERRADO!
El resto de las conclusiones son las mismas que en Gol . Débil mancha vayfay con mayor precisión la antena a bordo si se puede implementar en el UAV rotatorio estación de seguimiento de terreno con antena altamente direccional, aquí con el tablero debe inventar otra cosa. Optimizar el trabajo canal vayfay módulos utilizados tienen muchos ajustes, es necesario excavar con más detalle allí. Optimizar (minimizar) el flujo del tablero. Y es natural considerar una solución con la antena de a bordo.
PS Se encuentra en el módulo de configuración vayfay "Tierra", que se exhibió la señal de baja potencia en lugar de la 10dBm 28dBm. Este algo provalEst funcione.
Los planes para el futuro próximo h4>
Poner a bordo cerebros altamente inteligentes ArduPilot 2.0 (una referencia a un poco más tarde), que tienen el beneficio de y en este penolete mucho tiempo se ha desgastado - esto no será nervioso piloto y volar lejos, porque cerebros en el comando devuelve en penolet piloto automático en lugar empiezan y es importante para estabilizar el planeador en el plano horizontal, incluso cuando se gira - que permitirá más eficiente látigo antenny prueba. Instalar (ya en tránsito de China) y probar la antena de techo de 2,4 GHz. Ella directividad patrón hemisferio hacia abajo, como se dice quiere ver. Probado a 5,8 GHz. Organizar el flujo de registro de tierra a un archivo y, a continuación, ya que no es humanamente imposible. PS Y aún incluir cauterio izluchator cerebro a plena potencia!
El tercer punto importante, y gracias a mi esposa por el apoyo moral y la propiedad cámara hábil, sin la cual no podrían conseguir buenas fotos de todo el proceso.
Fuente: habrahabr.ru/post/220019/ |