3092
高清FPV的树莓派
深红高清FPV penolet H4> 
结识第二十同事试行铁高清FPV 决定重复壮举的树莓派+ PI摄像头的基础上。

简介 H4>的主要思想habrayuzera 锡林郭勒如何模拟FPV,完全同意!在数字时代享受PAL信号,类似于吸入花的香味了防毒面具(恕我直言)。有了树莓试剂盒同意删除的高分辨率视频的面膜,其播出实时的地面和在地面上享受鲜花的芬芳飞看着监视器,并在高清眼镜的未来。
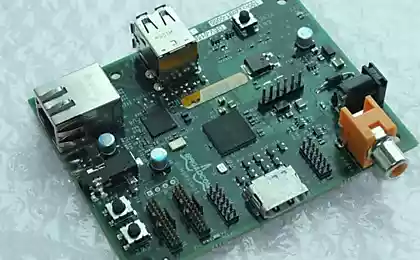
<表> 树莓派

TD> 皮相机
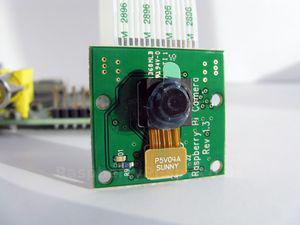
TD> TR> TABLE>对于vayfay桥测试的 Ubiquiti公司的子弹平方米马力 B>。

该模块vayfay非常适合移动平台的从主板上的电池通过POE容易供电,足以供电给两对(7-24V,蓝色对 + B>,一双棕色的 - B>),具有体积小,具有良好的动力性和工业设计。一个不错的奖金是 5.8 GHz的模型类似的外形,可让您在不改变平台的设计转移到另一个频段,简单地更换vayfay模块和天线。
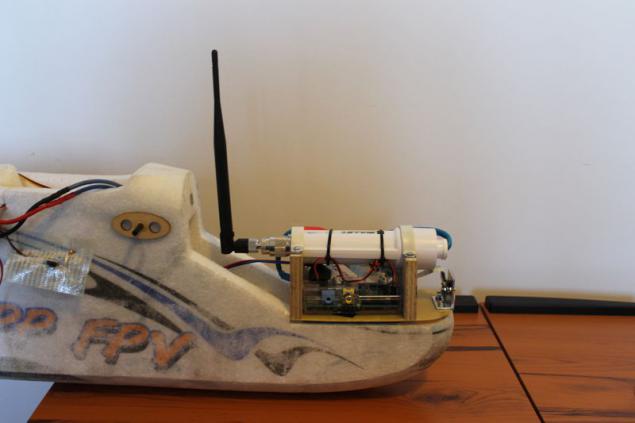
作为一个实验性的媒体EUT疯狂的想法,我们一直在使用<一href="http://www.hobbyking.com/hobbyking/store/__14465__EPP_FPV_1_8M_X_Large_EPP_Carbon_Fiber_R_C_Plane.html">пенолет (泡沫飞)上hobbikinge收购。在这个单元中,实行与无人机几乎所有的新兴理念。

这款机器的优点 - 它很容易安装必要的设备,方便驾驶的,提升能力和巨大的可维护性。后者的特征撞车后不止一次救起,一切都会环氧胶,和我们的火车penolet再次箭在弦上krashtestu。




负载penoleta H4> 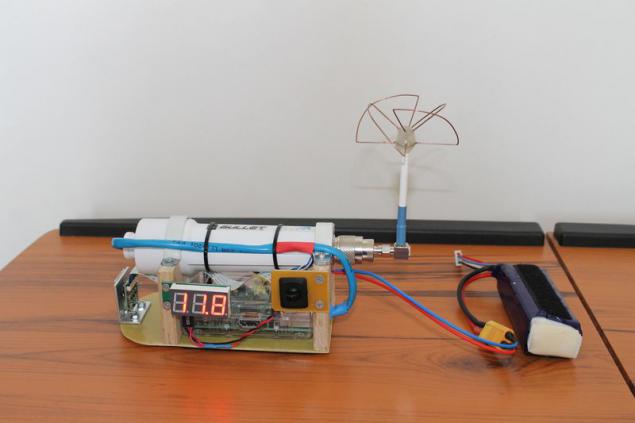
相机 树莓运行Raspbian 与天线vayfay模块 电压指示灯 主切换 LI > 电源覆盆子 将电池 LI> UL>为2.4GHz的模拟FPV和普通vayfay脚用自制的三叶草天线。

地球 H4> 



在笔记本电脑上运行的Ubuntu 12.04 LTS与遮阳 ð阿泰纳卢-link ANT24-0801 vayfay模块 电池电源模块 LI> UL>的Antenna 选择基于通用模式70度,垂直70度的水平。



软件 H4>广播进行了使用的Gstreamer 。
第一个重要的问题。我没有安装对应的软件,为此他感谢。我只是给使用脚本来启动的覆盆子和接收视频的笔记本电脑上的广播。
板 H5>
<密码> raspivid -n -w 1280 -h 720 -b 450 -fps 30 -vf -hf -t 0 -o - | \ GST-launch- 1.0 -v fdsrc! h264parse! rtph264pay配置间隔= 10角= 96 $ udpsink主机= 192.168.4.204 PORT = 9000 代码> PRE>
地球 H5>
<密码> GST-推出-1.0 -v udpsrc端口= 9000股='应用程序/ x-RTP,媒体=(字符串),视频,时钟频率= (INT)90000,编码,名称=(字符串)H264“! rtph264depay! avdec_h264! videoconvert! autovideosink同步= FALSE 代码> PRE>
在这里,我们去... H4>第二个重要的点。我不是一个试点。管理penoletom经验丰富的飞行员,为此他分开的感谢。夏天,我们有长期的成功在不同的机器。在这个阶段,我曾作为一个出发助推器。








...刚到 H4>与飞行究竟发生了三次,因为仍然,我们已超载的平面,推在井非常大的电池,希望好很长一段时间飞行。正因为如此,所以低速机是相当笨拙。着陆时未能克服侧风,机器倒在了机翼和用鼻子在地上。大而重的电池决定打破,仍然逃脱轻轻翻转机身泡沫(约可维护性,我写的环氧树脂已经干涸,penolet装甲列车是准备战斗飞行)。在一般情况下,该设备不会被损坏。但有一线希望......高清FPV WAS!


这是所有的东西开始!

高清FPV是......但是这并不遥远。实际上设法而不对字段的一个非常小的区域中的滞后的视频。

根据其辐射模式(水平甜甜圈)鞭状天线的行为就像......鞭状天线,即在高度,在一个陡峭的角度/转弯时错过花瓣接收天线开始落后。
影片与鞭状天线,显示屏上的每秒15帧写......发生什么事了一些画面给人。
在将来,将会使直接记录所接收的流的。
天线“三叶草”具有球形辐射图案,但不是非常高的范围,为信道,因此,“遥远”跨越也得到了图像上的耙。不幸的是,没有视频。
粉碎后进行了两次战役步行穿过田野与不同的天线,并像他们说的,有点预见的结果:范围为差,鞭状天线的工作原理远一点300-400米,如果花瓣(甜甜圈)的面打了接收天线,“三叶草”即可捻,只要你喜欢,但由于它广播给所有各方平等的范围比“销”300米甚至更小。




结论 H4>飞高清FPV - 这就是现实! CLOSED!
该结论的其余部分是相同高尔。弱点vayfay,如果你可以部署在地面跟踪站的旋转无人机具有高度定向天线,在这里与董事会必须发明一些东西更精确板载天线。优化工作vayfay通道使用的模块有很多的设置,有必要更详细地挖那里。优化(最小化),从电路板上的助焊剂。并且很自然地考虑与板载天线的解决方案。
PS B>在设置模块vayfay“地球”,这是展出的为10dBm 28dBm的低功率信号,而不是发现。这provalEst一些工作。
计划在不久的将来 H4>
放在板上高度智能化的大脑 Ardupilot 2.0 (参考了一下后),他们的利益,并在此penolete早已被磨损 - 这不会是紧张的飞行员和飞行距离,因为在地方上的自动驾驶仪penolet命令返回的大脑,并开始转向,即使以稳定的滑翔机在水平面上,重要的是 - 它可以让更有效的测试antenny鞭。 安装(已经从中国过境)和测试吸顶天线2.4 GHz的。她方向性图半球朝下,因为他们说会看到的。 测试到5.8 GHz的。 整理在地球上记录的流文件,然后因为它不是从人的角度不可能的。 PS B>并且仍然有烧灼大脑izluchator在充满电! LI> UL>第三个重要的点,并感谢我的妻子精神上的支持和熟练的相机所有权,否则不会得到全过程的精彩照片。
资料来源: habrahabr.ru/post/220019/