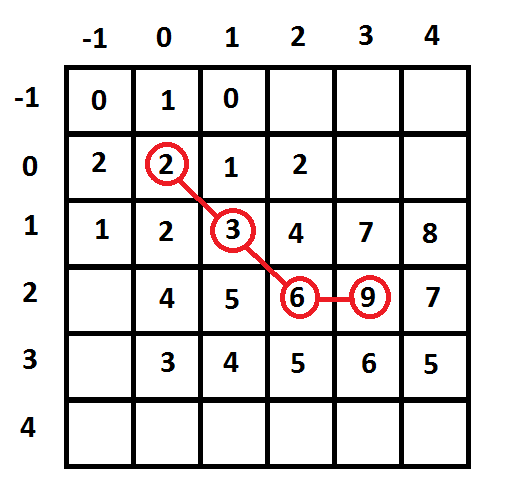
亚像素精度 H4>如果补偿相机抖动的图像像素精度,稳定的形象还是很明显的混蛋。幸运的是它可以是固定的。如果我们仔细分析相关函数的峰值附近的附近(见图3)中,我们可以看到,该函数的值是不是对称于最大,这意味着最大不在,她之间某处的点(2 3)与点(1,4)。如果我们接近附近的抛物面的最大相关函数的行为, A * X ^ 2 + B * X * Y + C * Y ^ 2 + D * X + E * Y + F = 0 B>,确认最大的原产地接任务减少到等参数抛物面的选择在哪些其从实际值在已知点的偏差是最小的。经验表明,用这种方法获得的准确度将澄清的0.1-0.2的顺序。当你摇晃补偿这样的精度,稳定的图像几乎没有抽搐。