1833
Гексапід Б.У.Н.Т
Після перегляду відео про гексаподи на YouTube (особливо вражає PhantomX), я вирішив спробувати свою руку на робототехнікі. Шукаю вперед, все вийшло і ось результат:
Я запитую всіх, хто цікавиться kata, є короткий опис історії створення і труднощі, які мені довелося зіткнутися, а також відео роботи гексапода. Немає графіків, діаграм і коду, просто текстів.
Я вже був знайомий з Arduino, але я не працював з консервними дисками. Я прочитав протягом тривалого часу, виявився в діапазоні консервів, в кінцевому підсумку вирішив взяти мініатюру HXT900, хоча цей пост сказав, що Hexapod barely стояв на ноги на слабких серверах, але я вирішив взяти шанс. Arduino Mega, Turnigy 2200mAh 3S 20C Lipo Pack акумулятор і TURNIGY 8-15A UBEC стабілізатор також був замовлений. Отримавши все необхідне, він видали всі розміри з стрижнем і почав малювати перший дизайн, а потім малюнок гексапода себе. Для прототипу отримав PhantomX, я хотів, як його servos знаходяться. У зв'язку з відсутністю алюміній і нездатністю різати Флексіглас на машині, було прийнято рішення зробити всі частини з триміліметра МДФ, які я шкодував, але про це пізніше. Насправді, через матеріал справи, він став для мене ім'я Hexapod B.U.N.T. - Buratino це No Longer That. Щоб зменшити розмір, «земці» сервісу були безперечно зрізані, так як можна побачити у фотографіях нижче.
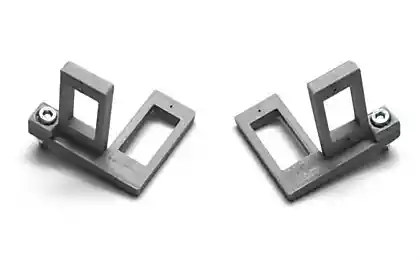
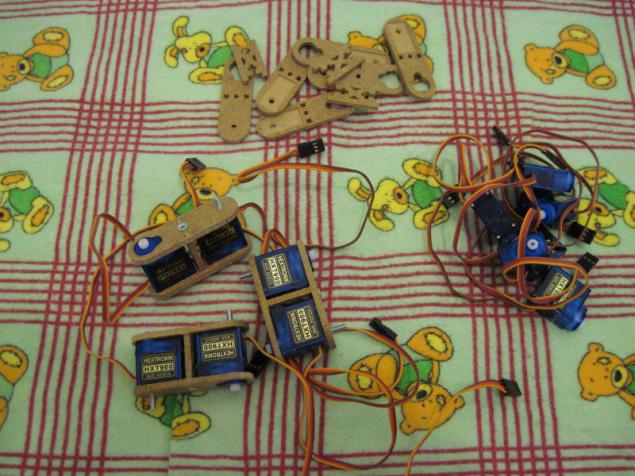
Фото процесу складанняПідключіть два servos в один блок.
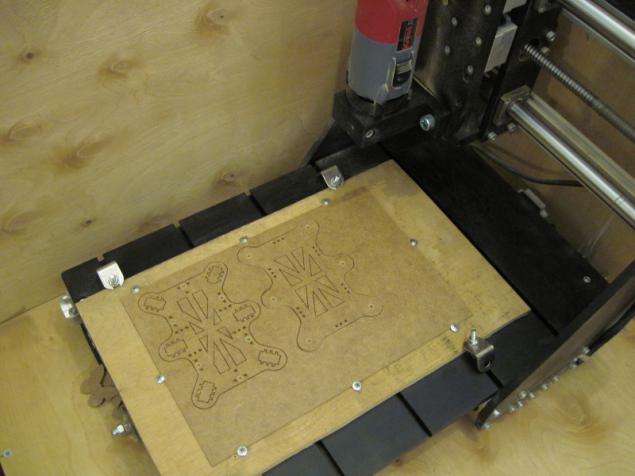
Вирізати частини тіла
Тіло зібрано, але це тушки, здавалося мені трохи жиру - довелося переробити, і це в сміття.
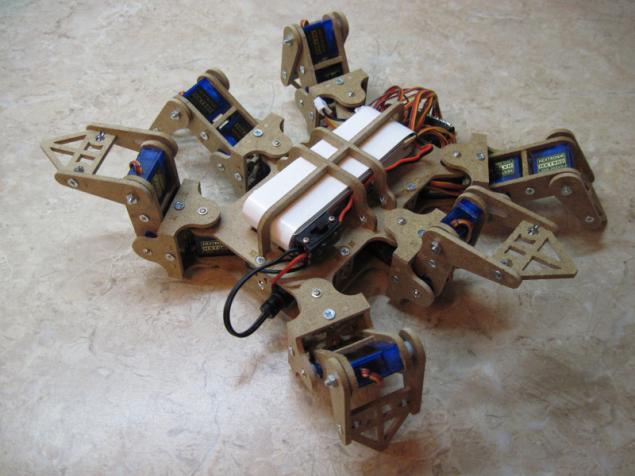
Останні штрихи - тушка зібрана, залишається закріпити ноги.

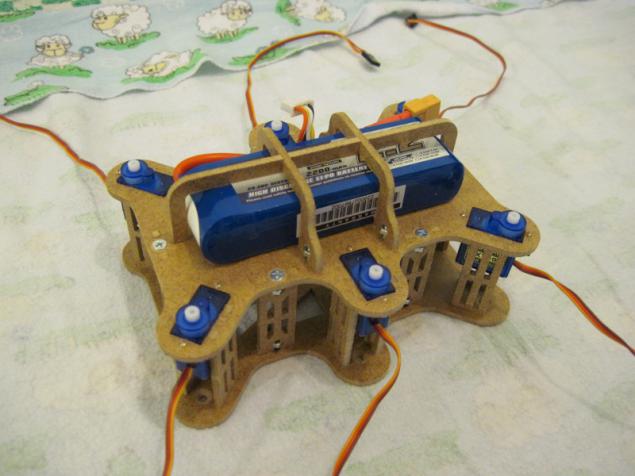
Ось кілька фотографій, якось я здійснювався процесом і повністю забули фотографії. Якщо ви звертаєте увагу - в останні два фото, акумулятор виглядає різним - в останньому він вже без етикетки. Просто коли я зробив замовлення, я не думаю, що я хочу купити специфічний роз'єм XT60 для підключення до акумулятора. В результаті мені довелося «розгорнути» роз'єм і паяльником. У зв'язку з безтурботністю, зникне коротке замикання і напругою на дротах. Після вимірювання напруги на терміналах роз'єму зарядки з мультиметром я зрозумів, що контакт між «банками» втратив. Розбирання акумулятора, знайденого зазором - вигорає алюмінієву «петальну» (мінус) в одній банці, і практично в корінь. Я намагався п'яти - але доступний паяльна кислота алюміній не бере. Я шукав новий акумулятор, але після того, як коротка Google купила флюси F64, який, як виявилося, паяльна алюміній не складніше міді. Важко отримати паяльник на залишки «малого» і акумулятора було переоцінено. Далі, на етапі складання, було встановлено, що ідея використовувати Mega Sensor Shield була невдалою - через неї тушки виявилася занадто товстою і неглибокою. Необхідно було почервоити малюнки і зменшити товщину тушів до висоти сервоприводу, що в підсумку призвело до того, що дроти з servos в туші не вписувалися повністю - частина, на якій подається потужність. Але ще більш красиво (і міцніше) ніж з товстою тушкою. Збір дрібних деталей з МДФ – це задоволення. Без файлу, з'єднання просто не вводять один одного, хоча проміжок зліва - різкі краї заважають. Вся структура виглядає флімси, є невеликі застібки, але в цілому він виявився не поганим і надійним достатнім, головне не змочити, або ще це призведе до. Hexapod зібраний, перший тест і виходить, що він відмінно стоїть на ногах і повністю підтримує його вагу. Зважає 640 грам по дорозі. У перших експериментах по її кривизню через дратівливу помилку в коді, один з консервів, що знімають шестерню - занадто великий кут був зазначений і нога, що залишився на туші. Я мав розбиратися і змінити заповідник, добре взявся з резервом. Після короткої думки був написаний невеликий ескіз для простої прямої прогулянки. Я соромлюся розмістити ескіз, але я з радістю покаже відео перших кроків гексапода.
Відео
Разом:
І так, я майже забули, всі компоненти, mdf і так на вартість мене близько 5 тис. рублів. З джойстиком, щитом (який виявився непотрібним) і іншими тріфлями (який був також практично не використаний), виходить близько 6 тис. Але якість готового виробу далеко від PhantomX, але я був готовий до нього.
Джерело: habrahabr.ru/post/219051/

Я запитую всіх, хто цікавиться kata, є короткий опис історії створення і труднощі, які мені довелося зіткнутися, а також відео роботи гексапода. Немає графіків, діаграм і коду, просто текстів.
Я вже був знайомий з Arduino, але я не працював з консервними дисками. Я прочитав протягом тривалого часу, виявився в діапазоні консервів, в кінцевому підсумку вирішив взяти мініатюру HXT900, хоча цей пост сказав, що Hexapod barely стояв на ноги на слабких серверах, але я вирішив взяти шанс. Arduino Mega, Turnigy 2200mAh 3S 20C Lipo Pack акумулятор і TURNIGY 8-15A UBEC стабілізатор також був замовлений. Отримавши все необхідне, він видали всі розміри з стрижнем і почав малювати перший дизайн, а потім малюнок гексапода себе. Для прототипу отримав PhantomX, я хотів, як його servos знаходяться. У зв'язку з відсутністю алюміній і нездатністю різати Флексіглас на машині, було прийнято рішення зробити всі частини з триміліметра МДФ, які я шкодував, але про це пізніше. Насправді, через матеріал справи, він став для мене ім'я Hexapod B.U.N.T. - Buratino це No Longer That. Щоб зменшити розмір, «земці» сервісу були безперечно зрізані, так як можна побачити у фотографіях нижче.
Фото процесу складанняПідключіть два servos в один блок.

Вирізати частини тіла

Тіло зібрано, але це тушки, здавалося мені трохи жиру - довелося переробити, і це в сміття.

Останні штрихи - тушка зібрана, залишається закріпити ноги.

Ось кілька фотографій, якось я здійснювався процесом і повністю забули фотографії. Якщо ви звертаєте увагу - в останні два фото, акумулятор виглядає різним - в останньому він вже без етикетки. Просто коли я зробив замовлення, я не думаю, що я хочу купити специфічний роз'єм XT60 для підключення до акумулятора. В результаті мені довелося «розгорнути» роз'єм і паяльником. У зв'язку з безтурботністю, зникне коротке замикання і напругою на дротах. Після вимірювання напруги на терміналах роз'єму зарядки з мультиметром я зрозумів, що контакт між «банками» втратив. Розбирання акумулятора, знайденого зазором - вигорає алюмінієву «петальну» (мінус) в одній банці, і практично в корінь. Я намагався п'яти - але доступний паяльна кислота алюміній не бере. Я шукав новий акумулятор, але після того, як коротка Google купила флюси F64, який, як виявилося, паяльна алюміній не складніше міді. Важко отримати паяльник на залишки «малого» і акумулятора було переоцінено. Далі, на етапі складання, було встановлено, що ідея використовувати Mega Sensor Shield була невдалою - через неї тушки виявилася занадто товстою і неглибокою. Необхідно було почервоити малюнки і зменшити товщину тушів до висоти сервоприводу, що в підсумку призвело до того, що дроти з servos в туші не вписувалися повністю - частина, на якій подається потужність. Але ще більш красиво (і міцніше) ніж з товстою тушкою. Збір дрібних деталей з МДФ – це задоволення. Без файлу, з'єднання просто не вводять один одного, хоча проміжок зліва - різкі краї заважають. Вся структура виглядає флімси, є невеликі застібки, але в цілому він виявився не поганим і надійним достатнім, головне не змочити, або ще це призведе до. Hexapod зібраний, перший тест і виходить, що він відмінно стоїть на ногах і повністю підтримує його вагу. Зважає 640 грам по дорозі. У перших експериментах по її кривизню через дратівливу помилку в коді, один з консервів, що знімають шестерню - занадто великий кут був зазначений і нога, що залишився на туші. Я мав розбиратися і змінити заповідник, добре взявся з резервом. Після короткої думки був написаний невеликий ескіз для простої прямої прогулянки. Я соромлюся розмістити ескіз, але я з радістю покаже відео перших кроків гексапода.
Відео
Разом:
- Збір шестикутника не так складно.
- Микросервери не слабшають.
- Не пропустіть на / не забудьте роз'єми акумулятора - паяльник під напругою - погана ідея
- Завжди візьміть заповідники з резервом.
- Якщо можливо – зробити алюміній, якщо не – то з пластику (плексор), в крайніх випадках мдф, хоча ні, краще не зробити Мдф взагалі.
І так, я майже забули, всі компоненти, mdf і так на вартість мене близько 5 тис. рублів. З джойстиком, щитом (який виявився непотрібним) і іншими тріфлями (який був також практично не використаний), виходить близько 6 тис. Але якість готового виробу далеко від PhantomX, але я був готовий до нього.
Джерело: habrahabr.ru/post/219051/