1833
六足B.U.N.T
观看视频在YouTube上关于hexapods(印象特别深刻PhantomX),决定尝试他的手在机器人。展望未来 - 一切都发生在这里的结果:
所有感兴趣的问一只猫,有简要介绍了创作的六足的历史和遇到的困难,以及视频。也没有任何图形,图表和代码,只有歌词。
与Arduino是已经熟悉,但servprivodami工作。长期阅读,理解分类SERV,最终决定采取微小 HXT900 ,虽然<一HREF =“http://habrahabr.ru/post/149038/”>在这个岗位并说,在微弱Servakh六足勉强站在他的脚,但我还是决定冒险一试。刚刚订购了Arduino的兆丰,电池 Turnigy 2200mAh的3S 20C锂聚合物包稳定和的 TURNIGY 8-15A UBEC 。收到所有必要后,删除了所有尺寸卡钳,开始第一次图纸设计,然后绘制自己和昆虫。对于原型了PhantomX,喜欢他的农奴如何定位。由于缺乏铝和无法切割有机玻璃的机器上,就决定做trёhmillimetrovoy密度板,什么可惜的所有部分,但后来更多。外壳材质和实际,因为它发生在调用昆虫B.U.N.T. - 匹诺曹是不一样的。减小尺寸,“耳朵”已被无情地削减SERV,如下面的照片所示。
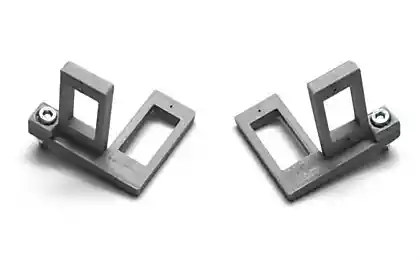
图片生成过程的的连接在一个单元2舵机。
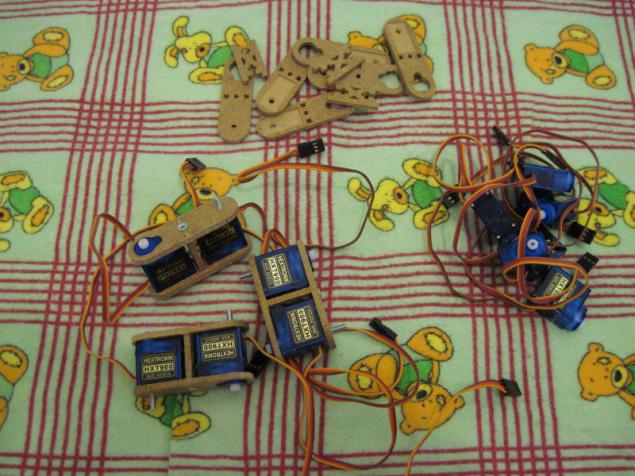
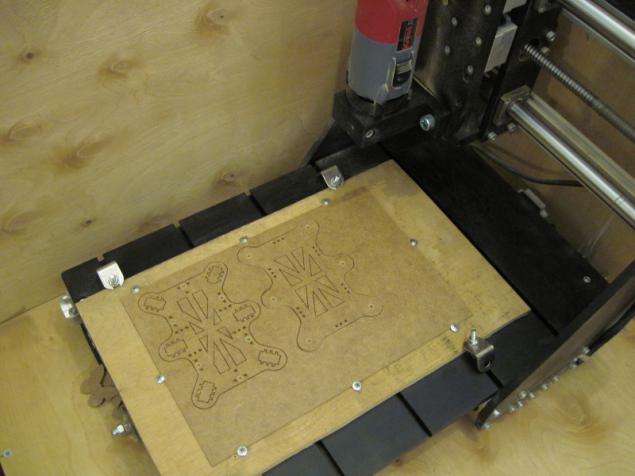
我们切身体部位
外壳组件,仅此鸟在我看来,粗壮的 - 不得不重做,这在垃圾桶
。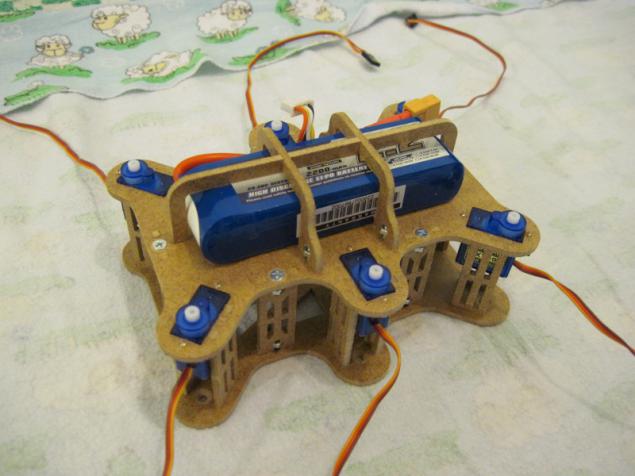
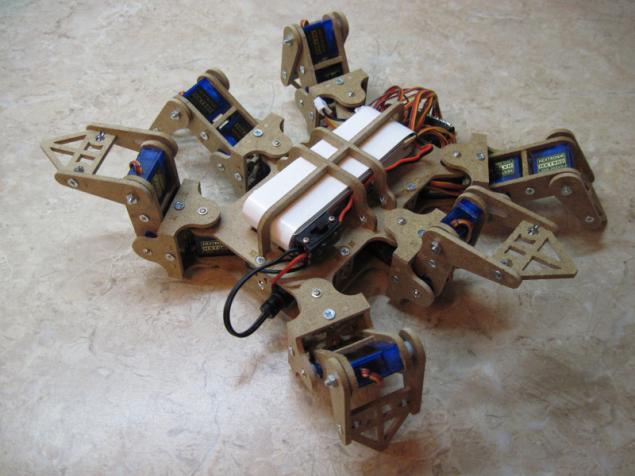
收尾工作 - 尸体收集起来,左脚绑
。
照片少得意忘形,完全一个过程忘了拍照。如果您已经注意到了 - 最后的两张照片电池看起来不一样 - 最后他没有标签。只是当你下订单,不知何故没想到的是,你需要购买更多的具体的XT60插头,用于连接电池负载。最后,不得不“啃”连接和焊接。根据我的粗心大意krivorukost短路和整个漏电压。在充电连接器的端子波默罗伊万用表的电压,实现了“银行”之间失去了联系。拆卸电池组,找到了差距 - 吹铝“花瓣”(减号)在一家银行,拥有近的根源。尝试podpoyatsya - 但有焊铝酸不走。心烦正要订购新电池,但经过短暂gugleniya是买流量F64,其中,事实证明,没有铝合金焊接难度比铜。几乎可以焊接到“花瓣”和电池已经恢复的遗迹。在接下来的步骤组装透露,这个想法用米加传感器屏蔽失败 - 因为这鸟儿太粗的和丑陋的。我不得不重做附图和降低胎体的厚度为致动器,这最终导致了从伺服胎体本身并不完全在一起的导线的事实的高度 - 其中一部分供应的食品被提交到外部。但即便如此美丽(做强)比厚的尸体。收集MDF的细节 - 什么更多的乐趣。没有文件的连接只是没有到对方,不过,并留下了缺口 - 防止锋利的边缘。整个结构看起来hlipkovatoy有小的差距,但总体不会遭遇不测,是相当可靠的,最重要的不要浸泡,而这将导致。六足组装,第一次测试,并证明他是好他的脚,完全能承受的重量。它的重量640克方式。在从SERV受挫齿轮的一个代码的恼人的bug krivorukost第一个实验 - 指定过大的角度,把她的脚的尸体。我不得不拆卸和更换伺服祝福了股票。经过一番商议被写了一个小草图简单的直线距离。画出我惭愧地传播,但视频会显示在第一步骤六足与乐趣。
视频 B>
总计:
收集昆虫并不是那么难 Mikroservy不弱 请不要对/不要忘了电池连接器吝啬 - 焊锡通电坏主意 LI> Servais会面总是用保证金 如果有一个机会 - 让铝 - 如果不是,那么塑料(有机玻璃),中密度纤维板的极端情况下,虽然没有,密度板最好不要做 ul>然后,我有计划去学习,通过蓝牙与PS3上的,或者至少从智能手机的操纵杆来控制昆虫,但那是另一回事。
是的,我差点忘了,所有的配件,中密度纤维板和其他费用我约5000。随着操纵杆,盾(事实证明没有必要)等小东西(这也是几乎不使用)大约是6000。但成品的质量是远远PhantomX,但我已经准备好了。
资料来源: habrahabr.ru/post/219051/

所有感兴趣的问一只猫,有简要介绍了创作的六足的历史和遇到的困难,以及视频。也没有任何图形,图表和代码,只有歌词。
与Arduino是已经熟悉,但servprivodami工作。长期阅读,理解分类SERV,最终决定采取微小 HXT900 ,虽然<一HREF =“http://habrahabr.ru/post/149038/”>在这个岗位并说,在微弱Servakh六足勉强站在他的脚,但我还是决定冒险一试。刚刚订购了Arduino的兆丰,电池 Turnigy 2200mAh的3S 20C锂聚合物包稳定和的 TURNIGY 8-15A UBEC 。收到所有必要后,删除了所有尺寸卡钳,开始第一次图纸设计,然后绘制自己和昆虫。对于原型了PhantomX,喜欢他的农奴如何定位。由于缺乏铝和无法切割有机玻璃的机器上,就决定做trёhmillimetrovoy密度板,什么可惜的所有部分,但后来更多。外壳材质和实际,因为它发生在调用昆虫B.U.N.T. - 匹诺曹是不一样的。减小尺寸,“耳朵”已被无情地削减SERV,如下面的照片所示。
图片生成过程的的连接在一个单元2舵机。

我们切身体部位

外壳组件,仅此鸟在我看来,粗壮的 - 不得不重做,这在垃圾桶
。

收尾工作 - 尸体收集起来,左脚绑
。

照片少得意忘形,完全一个过程忘了拍照。如果您已经注意到了 - 最后的两张照片电池看起来不一样 - 最后他没有标签。只是当你下订单,不知何故没想到的是,你需要购买更多的具体的XT60插头,用于连接电池负载。最后,不得不“啃”连接和焊接。根据我的粗心大意krivorukost短路和整个漏电压。在充电连接器的端子波默罗伊万用表的电压,实现了“银行”之间失去了联系。拆卸电池组,找到了差距 - 吹铝“花瓣”(减号)在一家银行,拥有近的根源。尝试podpoyatsya - 但有焊铝酸不走。心烦正要订购新电池,但经过短暂gugleniya是买流量F64,其中,事实证明,没有铝合金焊接难度比铜。几乎可以焊接到“花瓣”和电池已经恢复的遗迹。在接下来的步骤组装透露,这个想法用米加传感器屏蔽失败 - 因为这鸟儿太粗的和丑陋的。我不得不重做附图和降低胎体的厚度为致动器,这最终导致了从伺服胎体本身并不完全在一起的导线的事实的高度 - 其中一部分供应的食品被提交到外部。但即便如此美丽(做强)比厚的尸体。收集MDF的细节 - 什么更多的乐趣。没有文件的连接只是没有到对方,不过,并留下了缺口 - 防止锋利的边缘。整个结构看起来hlipkovatoy有小的差距,但总体不会遭遇不测,是相当可靠的,最重要的不要浸泡,而这将导致。六足组装,第一次测试,并证明他是好他的脚,完全能承受的重量。它的重量640克方式。在从SERV受挫齿轮的一个代码的恼人的bug krivorukost第一个实验 - 指定过大的角度,把她的脚的尸体。我不得不拆卸和更换伺服祝福了股票。经过一番商议被写了一个小草图简单的直线距离。画出我惭愧地传播,但视频会显示在第一步骤六足与乐趣。
视频 B>
总计:
收集昆虫并不是那么难 Mikroservy不弱 请不要对/不要忘了电池连接器吝啬 - 焊锡通电坏主意 LI> Servais会面总是用保证金 如果有一个机会 - 让铝 - 如果不是,那么塑料(有机玻璃),中密度纤维板的极端情况下,虽然没有,密度板最好不要做 ul>然后,我有计划去学习,通过蓝牙与PS3上的,或者至少从智能手机的操纵杆来控制昆虫,但那是另一回事。
是的,我差点忘了,所有的配件,中密度纤维板和其他费用我约5000。随着操纵杆,盾(事实证明没有必要)等小东西(这也是几乎不使用)大约是6000。但成品的质量是远远PhantomX,但我已经准备好了。
资料来源: habrahabr.ru/post/219051/