1436
Historia de otras bicicletas eléctricas con las manos: reloaded
Saludos, querido Habrasoobschestvo.
Inspirado por los artículos escritos por chomper
«Historia de las otras bicicletas eléctricas con las manos»
y «Historia de las otras bicicletas eléctricas con sus manos v2.0» , decidió crear algo propio.
¿Qué pasó, por así decirlo, "basado en" y una gran cantidad de fotos y texto - bajo el corte
.
Adherentes motor ruedas que tengo que decir - No quiero un peso de 7 kg o en la rueda delantera o trasera. Yo trabajo en el tercer piso y las escaleras para llevar a este encanto - no realmente, gracias I>
.
Libro de Consulta se tomó el concepto y repensada para adaptarse a sus necesidades.
Motivos construidas parcialmente trivial - Quiero ir al trabajo en bicicleta, pero una diapositiva mata por completo todos los impulsos, y en parte no - al igual que sus manos para sentir "elektrobayk»
.
La base fue tomada moto de pura raza, compró hace muchos años de los vendedores ambulantes "ad de Europa ».
De comprado: h4> Electric (modelo outrunner) tamaño 6354 kv200
Ahora, las obras de construcción h4> Desde la fijación de la rueda dentada radios para transmitir el esfuerzo fue abandonado inmediatamente.
Frivill (trinquete) h4> Montado en una taza de transporte zakontrogaen anillo nativo de la taza.
buje trasero se utiliza como un eje intermedio h4> Instalado en U -. proftruby segmento en forma
engranaje grande h4> seguro se convierta en el eje de la espiga, sin la manga en sí conos "pellizcado".
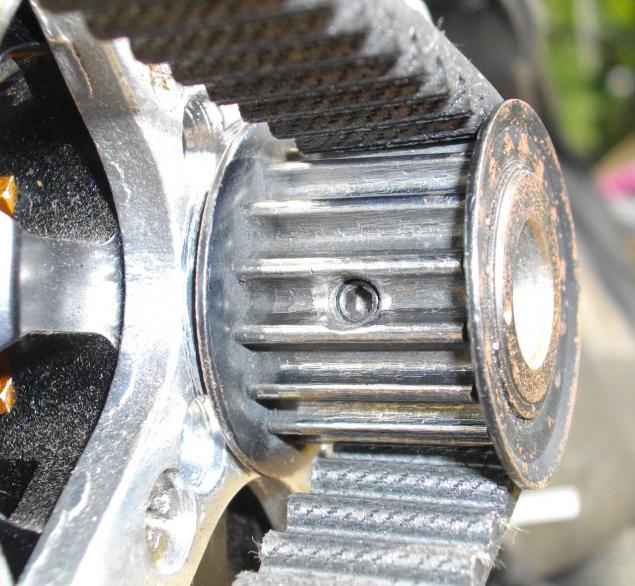
piñón h4> Fijo al eje del motor 2 Goujon.
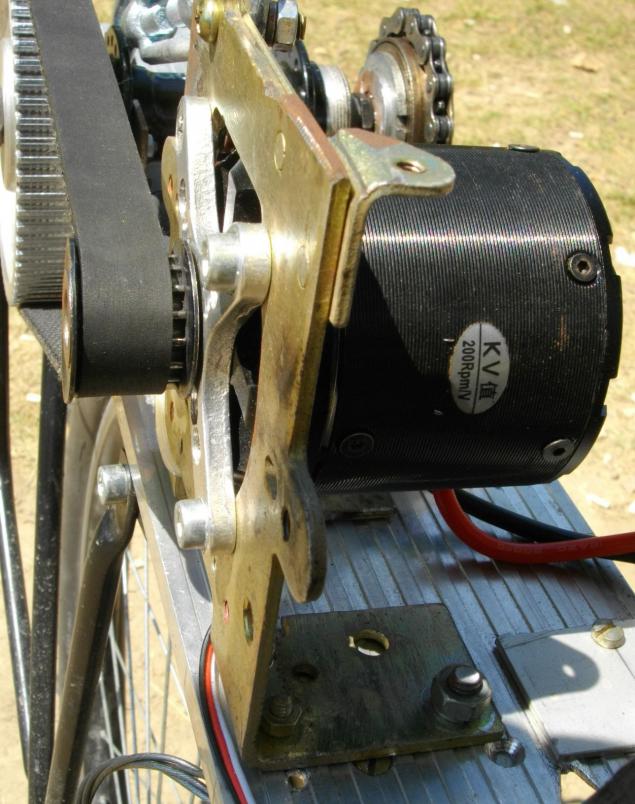
Motor h4> Se adapta travesaño estándar de la estructura en forma de L que se encuentra en los contenedores.
tensor de la cadena h4> se fija a las notas marginales del tronco.
Una vista general h4>
Para los más atentos h4> ¿Por qué entonces cordón.
En el diagrama de cableado h4> El servotestere ha sido eliminado y una resistencia variable se conecta en lugar del acelerador sensor Hall.
¿Cuál fue el resultado h4> Reducción total - engranaje pequeño 15 / engranaje grande frivill 72 * 15/50 = gran estrella 0 0625
Prueba h4> yo tratamos de hacer un video.
Conclusión h4> En general, el concepto es bastante viable, las impresiones positivas del sistema. Con el objetivo de hacer frente completamente. Debido a que el motor sin sensores (sensor) con un natural no tire, primero aceleramos a 10-15 km / h pies, luego poco a poco dar "gas". Si subidas para ayudar a las piernas de accionamiento eléctrico "sin esfuerzo" y mantener una velocidad de unos 20 kmh resulta muy económica.
Gracias h4> Quiero dar las gracias a mi padrino Andrew, sin los cuales mis ideas locas nunca se habrían implementado en el metal.
Inspirado por los artículos escritos por chomper
«Historia de las otras bicicletas eléctricas con las manos»
y «Historia de las otras bicicletas eléctricas con sus manos v2.0» , decidió crear algo propio.
¿Qué pasó, por así decirlo, "basado en" y una gran cantidad de fotos y texto - bajo el corte
.
Adherentes motor ruedas que tengo que decir - No quiero un peso de 7 kg o en la rueda delantera o trasera. Yo trabajo en el tercer piso y las escaleras para llevar a este encanto - no realmente, gracias I>
.
Libro de Consulta se tomó el concepto y repensada para adaptarse a sus necesidades.
Motivos construidas parcialmente trivial - Quiero ir al trabajo en bicicleta, pero una diapositiva mata por completo todos los impulsos, y en parte no - al igual que sus manos para sentir "elektrobayk»
.
La base fue tomada moto de pura raza, compró hace muchos años de los vendedores ambulantes "ad de Europa ».
De comprado: h4> Electric (modelo outrunner) tamaño 6354 kv200 
Especificaciones del vendedor
Velocidad de rotación: 200 (kv) RPM / V
Corriente continua: 90A
Max. Actual:
100A
Voltaje de entrada: 14,8 - 37V
Max. Eficiencia: 98%
Corriente sin carga:
0.9A
Resistencia interna: 74m (Omega)
Potencia: 2450W
Motor Dimensiones (diámetro x longitud): 63mm x 72mm
Propulsor Dimensiones: 19 x 10.19 x 12 / 18,5 x 12
Tipos de pilas de entrada: NiCd / NiMH / Li-po
Batería
Recomendar Modelo: Avión
Spidkontroller (ESC) En la primera versión fue Misterio Firedragon 80A, alias Hobbywing, alias Fentium

Pero tuvo resultados negativos. Errores de sincronización bajo carga echar a perder toda la diversión de la utilización del dispositivo de mano.
Más tarde, fue comprado por Hobbyking SS Serie 90-100A
Con este controlador es mucho mejor si hay contratiempos menores para presionar demasiado fuerte el acelerador.

Servotester es probablemente el más fácil y el más común. 
Vattmetr- clon Turnigy 130A 
modelo batería- LiPO 6S 22.2V 5a-h marca China HRB con salida de corriente declaró
50C

manija de gas de la serie de bicicletas eléctricas, pulgar En el interior del sensor Hall con una salida lineal y un sistema de imanes en un anillo móvil.
Desarrollado por 5 voltios y produce aproximadamente 0,7 a 4.6V.

Tiradores sensor de freno presionando planeaban hacer un corte de gas pulsando cualquier freno, pero tal vez sólo lo hacen los pilotos traseros «detener»

Frivill (trinquete) 16 dientes 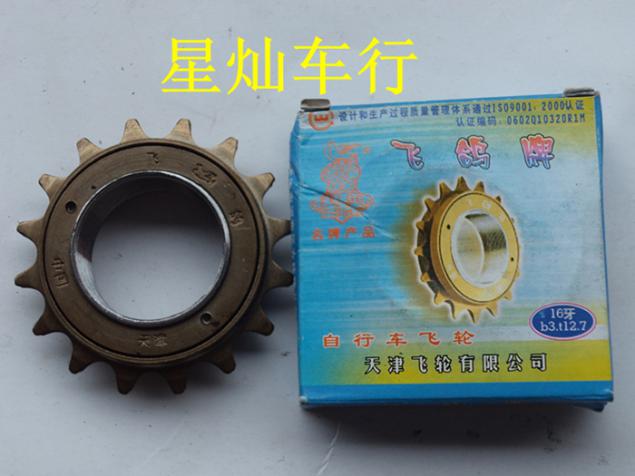
El baúl trasero, como parte del diseño 
Material de Acabado y cinturón con el perfil del diente HTD 5 M y 72 15zubov amplia 15mm.

- El piñón usado 50 dientes, no sé de cualquier sistema elegido de lo que era.
- Perekidka, he usado para su uso como un tensor de cadena.
- Izquierda carro taza con anillo de sujeción
(tuerca de seguridad?)
- Y, por supuesto, la cadena
.
- Un surtido de sujetadores
.
El viejo buje trasero que tenía.












Ahora, las obras de construcción h4> Desde la fijación de la rueda dentada radios para transmitir el esfuerzo fue abandonado inmediatamente.
Utilice estándar de montaje para freno de disco con el disco. El asterisco está atornillado en el disco.
Pido disculpas por la moto polvoriento.

Anticipándose a preguntas sobre los 2 tornillos entre disco de montaje sexto - que los tornillos que fijan la unidad rosca de montaje de relajarse. Estoy de acuerdo en que una decisión controvertida, pero todavía funciona.
Sí, la naturaleza es donde el buje trasero de disco de montaje es integral con la manga y luego no tener que usar el "partido y bellotas." Sin embargo, en ciertas circunstancias, tenía que hacerlo.

Frivill (trinquete) h4> Montado en una taza de transporte zakontrogaen anillo nativo de la taza.




buje trasero se utiliza como un eje intermedio h4> Instalado en U -. proftruby segmento en forma


engranaje grande h4> seguro se convierta en el eje de la espiga, sin la manga en sí conos "pellizcado".
La ranura fresada engranaje en el eje de taladrado y el pasador que encaja en una ranura en la rueda insertado.


piñón h4> Fijo al eje del motor 2 Goujon.

Motor h4> Se adapta travesaño estándar de la estructura en forma de L que se encuentra en los contenedores.

tensor de la cadena h4> se fija a las notas marginales del tronco.

Todo montado sobre una placa estructurada de aluminio rígido, que a su vez se fija a las notas marginales del tronco.

Una vista general h4> 



Para los más atentos h4> ¿Por qué entonces cordón.

Este "pico" apareció en el proceso de terminar la construcción. El par motor suficiente para deformar la placa de soporte, en el que la tensión de la correa se debilita, y tenía efecto. Hemos resuelto el problema "cabeza" ahora todo es normal.

En el diagrama de cableado h4> El servotestere ha sido eliminado y una resistencia variable se conecta en lugar del acelerador sensor Hall.
También instalado remanso 1k resistencia en un botón de circuito, como se observa, sin cambio de modo, probablemente debido a las interferencias.
Por el momento, el esquema se parece.
A fin de no tirar de los cables de alimentación a través de la bicicleta, han impuesto metros de derivación de energía como se describe de este sitio web .
Bien espaciadas & quot; + & quot; Alimentos y & quot; + & quot; medición, poner en perspectiva aislada convertidor de 9V a 5V (se encuentran en la tarjeta de red con BNC) como en el esquema actual, todavía hay una cierta evidencia de bajo-actual.
Funciona con pilas sin BMS, que se utiliza para prevenir monitor de batería overdischarge sintonizado a 3,3 V. Al llegar a la tensión ajustada o menos bien leído en cualquier banco chillido muy fuerte.

Cobro equilibrado-Li-Io modo clon B6 IMAX. ¿Por qué no Li-Po? Debido a la carga a 4,1 voltios en vez de 4.2 debería aumentar teóricamente la duración de la batería.


¿Cuál fue el resultado h4> Reducción total - engranaje pequeño 15 / engranaje grande frivill 72 * 15/50 = gran estrella 0 0625
La velocidad máxima del motor a la tensión nominal de la batería 22.2 * 200 = 4440
Después de la reducción * 4440 0, 0625 = 277, 5 / min a una rueda.
Con un diámetro de ruedas de 650mm (menores de piloto de carga permitirá a 640), la velocidad teórica de 33 vueltas, 477 kmh
En la práctica, en una línea recta en una tasa de ligera pendiente fija de 33,3, que está cerca de la teoría.
El consumo de energía - Consumo de pico (medidor de potencia indicación, y que puede ser un poco "loros") 1200vatt
El consumo medio de subida rápida con una ligera pendiente de 600-800 vatios. Por 100-300 vatios directos.
Prueba h4> yo tratamos de hacer un video.
A la vista de la carretera y los disparos "con las manos" video salió tan-tan, pero algo que usted puede considerar. Para la impresión general ha reducido el personal - comienzan diapositivas , sobre 8-я segundo vídeo 27, cuando era el máximo consumo actual. El ascenso de la colina sin piernas solamente sobre el motor eléctrico en el máximo "de gas", desliza pendiente no conocen los detalles para aquellos que deseen ruta con guglokart.
Otro video, movimiento en línea recta, al final de una pequeña aceleración (para coger el verde), ruta .
Conclusión h4> En general, el concepto es bastante viable, las impresiones positivas del sistema. Con el objetivo de hacer frente completamente. Debido a que el motor sin sensores (sensor) con un natural no tire, primero aceleramos a 10-15 km / h pies, luego poco a poco dar "gas". Si subidas para ayudar a las piernas de accionamiento eléctrico "sin esfuerzo" y mantener una velocidad de unos 20 kmh resulta muy económica.
Los planes para aumentar la capacidad de la batería, instale la cubierta de la unidad para limpiar las partes eléctricas.
Gracias h4> Quiero dar las gracias a mi padrino Andrew, sin los cuales mis ideas locas nunca se habrían implementado en el metal.
Fuente: habrahabr.ru/post/229885/
























{kind=link}
{kind=link}
40 mejores juegos para Android (por ahora)
El uso de los principios de la psicología de la Gestalt para aumentar los sitios de conversión. Parte 1: La ley de la brevedad