1435
另一种电动自行车用自己的双手历史:重载
你好,亲爱的Habrasoobschestvo。
由 chomper
撰写的文章的启发 «的另一电动自行车用自己的双手历史»
和 «的另一电动自行车用自己的双手V2.0历史»,决定建立自己的东西。
发生了什么事,所以要“立足”说,和很多照片和文字 - 下切
。
遗民电机车轮我不得不说 - 我不想7公斤或前轮或后轮的重量。我工作的三楼,楼梯携带这种魅力 - 没有真的,谢谢 I>
。
原始资料拍摄的概念,并重新思考,以满足您的需求。
动机建部分微不足道的 - 我想骑自行车去上班,但一滑完全杀死所有的冲动,而部分没有 - 像他们的手感到“elektrobayk»
。
基础拍摄纯种的自行车,买了很多年前从贩子“的广告来自欧洲»。
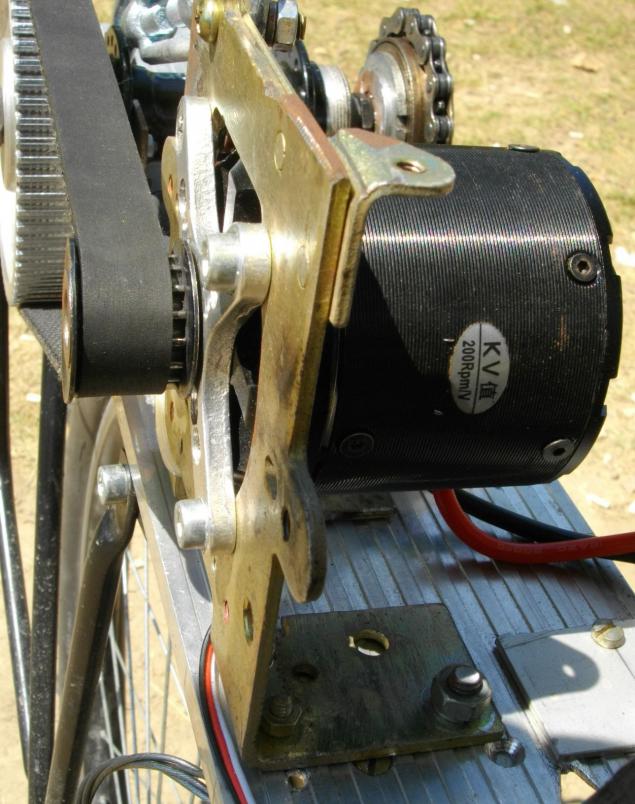
从购买: H4> 电器(型号外转子)尺寸6354 KV200 B> 14787011
现在,建筑工地 H4>从附件辐条链轮传输的努力立刻放弃。
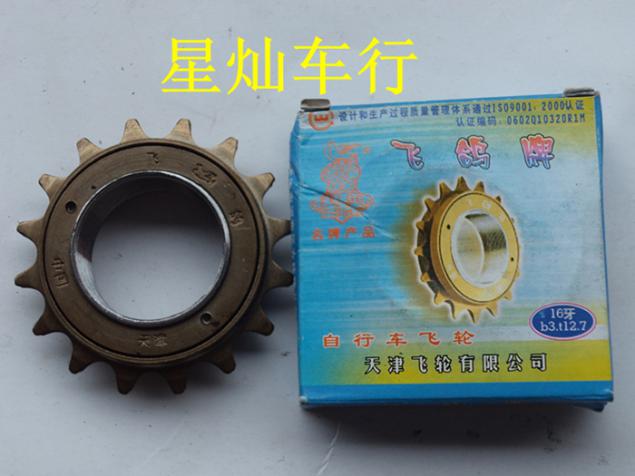
Frivill(棘轮) H4>安装在一个杯子托架zakontrogaen从杯子本地环。
后轮毂被用作中间轴 H4>安装以U - 形段proftruby
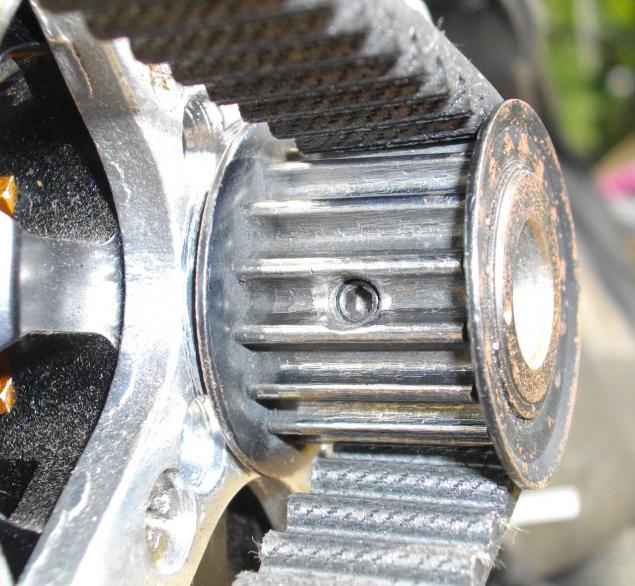
大齿轮 H4>从接通销的轴,而不套筒本身“捏”锥体安全。
齿轮 H4>固定在电机轴2古戎。
汽车 H4>适合在垃圾箱中发现的L形结构的标准横梁。
链条张紧器 H4>被固定为从树干的旁注。
一个普遍的看法 H4>
对于最周到 H4>那么,为什么挂绳。
在接线图 H4>的servotestere已被删除,一个可变电阻器连接,而不是霍尔传感器油门。
结果是什么 H4>总减速 - 小齿轮15 /大齿轮frivill 72 * 15/50 =大星0 0625
证明 H4>我试图使一个视频。
结论 H4>一般来说,这个概念是相当可行的,该系统的正面印象。随着目标完全应付。由于传感器(传感器)发动机,自然不拉,首先我们加快到10-15公里/小时的脚,然后逐渐给“气”。如果攀升,以帮助电力驱动腿“不紧张”,并维持约20公里/小时的速度事实证明非常经济。
感谢 H4>我想说非常感谢你对我的教父安德鲁,没有他们,我的疯狂的想法永远也不会在金属来实现。
由 chomper
撰写的文章的启发 «的另一电动自行车用自己的双手历史»
和 «的另一电动自行车用自己的双手V2.0历史»,决定建立自己的东西。
发生了什么事,所以要“立足”说,和很多照片和文字 - 下切
。
遗民电机车轮我不得不说 - 我不想7公斤或前轮或后轮的重量。我工作的三楼,楼梯携带这种魅力 - 没有真的,谢谢 I>
。
原始资料拍摄的概念,并重新思考,以满足您的需求。
动机建部分微不足道的 - 我想骑自行车去上班,但一滑完全杀死所有的冲动,而部分没有 - 像他们的手感到“elektrobayk»
。
基础拍摄纯种的自行车,买了很多年前从贩子“的广告来自欧洲»。