3544
Astrotreker por dos noches
Después de leer el artículo sobre astrónomos aficionados me puse a tratar de tomar fotos de la estrella con una cámara ordinaria sin telescopio. Artículo sugirió la idea de astrotrekery - dispositivos para compensar la rotación del cielo en exposiciones prolongadas.

Buscar en Google, descubrí que se pueden comprar fácilmente. Pero eso es la picadura de precios. Por ejemplo, la más barata Vixin Ploarie estrella Rastreador cuesta $ 400 + de la entrega. Sí y levantando la duda. En el futuro, pensaba ir de objetivo gran angular y un 70-200 / 2.8 que se incluye con la cámara pesa menos de medio kg.
En la búsqueda resultó que las personas hacen a sí mismos llamados Barn Door Trackers: , два y другие. En pocas palabras - la puerta del cobertizo. El principio de funcionamiento es simple - dos placas conectadas por una puerta dosel. Uno de ellos se hace girar a la misma velocidad que la tierra alrededor de su eje. El eje de la copa siempre apunta a Polaris. El tablero inferior se coloca en un trípode y se coloca en la cabeza del trípode media móvil con la cámara.
Bajo la corte una gran cantidad de imágenes.
Me puse a tratar de hacer este rastreador. Porque sin ella sólo se puede disparar pistas estelares de este tipo.

Según estimaciones para este casi todo estaba a la mano. Decidimos tomar como base este tracker. Hay que tener una descripción de la metodología de cálculo de los parámetros básicos.
El material ha sido seleccionado para 10mm dostochek MDF como fue la experiencia de corte por láser en el estudio. El material es barato, fácil de usar. En términos de fiabilidad demasiado pronto para decirlo. Mira la operación de prueba.
En primer lugar, en el programa de CAD dibujé un modelo de lo que debería haber hecho. Para ello era necesario calcular el radio y la velocidad de rotación de la viga. Por mi radio de estimación resultó 182.85mm para pernos M5 con paso de 0,8 mm de rosca y tuerca de velocidad 1 / min. Horquilla M5 fue elegido como un compromiso entre resistencia y paso de rosca.
Porque posteriormente querido disparar a 70-200 / 2.8 entonces tenía que contar la cantidad de pasos que el motor se puede hacer en un minuto que no había desenfoque dentro de un solo píxel. Después de todo lo que hice por diez prikidok margen de error que no fabricaría diseño empeoró dramáticamente la situación.
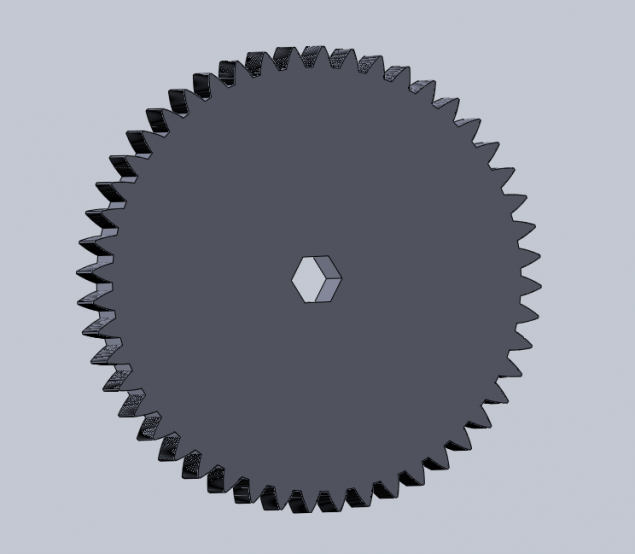
Para girar la tuerca en la isla en el diseño original del arte utilizado. Pero para encontrar los artículos para el dinero suficiente y no funcionó. Tolna estaban en e-bay y luego a $ 10 + mes entrega. Por lo tanto, los engranajes también decidieron cortar por láser de MDF o acrílico.
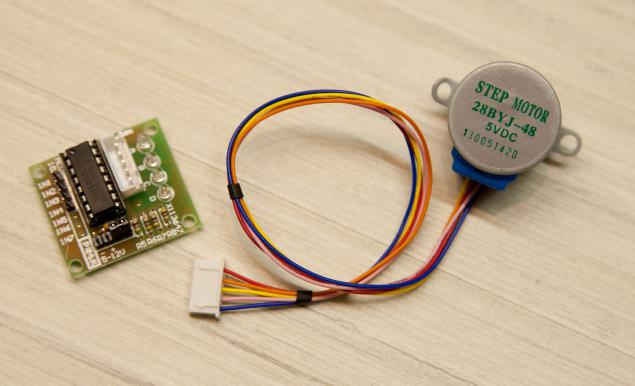
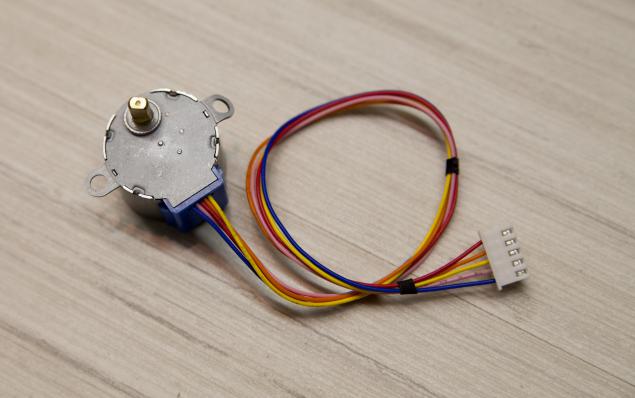
Como motor paso a paso utilizado chino 28BYJ-48. Su larga pongo varias piezas, todos querían jugar. Se paran con el controlador de la tarjeta es de menos de $ 2 en la entrega de eBay. Está alimentado 5-12 voltios. Hace una revolución del eje de los 64 pasos. También cuenta con una caja de cambios con koefitsientom cerca de 63.68395: 1. Así, el eje externo se gira en pasos 2037 modo de 4 pasos o 4075-pasos en el modo de 8 pasos. Torque no es grande, pero para este problema es más que suficiente. En Internet, escriben que volvió a por él en el orden de 15 / min, pero con un aumento de potencia de hasta 12V. Decidí que era suficiente para mí 4 rev / min e hice la relación de transmisión. 4: 1 que sería para cuatro vueltas de la tuerca del motor en el espárrago da una vuelta
En la tienda me compré una puerta del cobertizo con holgura mínima. Su tamaño y anchura se convirtieron en dostochek. También ha comprado una horquilla. En otra tienda marcó fijaciones. En sujetadores, corte MDF, bucle tomó cerca de 100 USD. ($ 8,3). En ebay ordenado una rótula pequeña pero hasta ahora ha puesto el viejo trípode convencional.
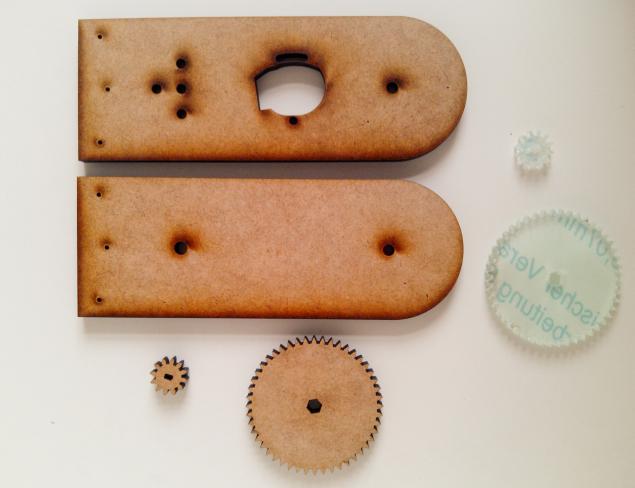
En la mitad inferior hice orificios para la instalación de una cabeza desmontable plataforma foto Manfrotto 804RC2 entretenía yo. También hizo los agujeros para el motor. He proporcionado un ajuste de la distancia entre los engranajes de rotación alrededor de uno de los agujeros de montaje del motor.
Cuando estaba satisfecho con los dibujos, lo llevé a cortar y traje aquí son maravillosos, pero con olores fuertes humos detalles.
Engranajes y corte de acrílico y MDF. Con acrílico convertido malos extremos de los poplavilis dientes. Tuve que tratarlos con un archivo. Subjetivamente, en el curso de MDF se volvió más suave. Pero mira en el campo de batalla.
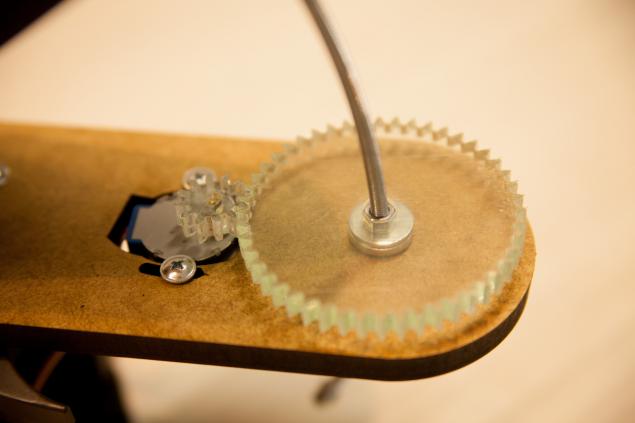
La fijación de la rueda dentada a la tuerca es muy simple - un agujero en forma de hexágono de tolerancia. Acrílico - 8mm. Sólo hay que poner el 2 tuercas M5.

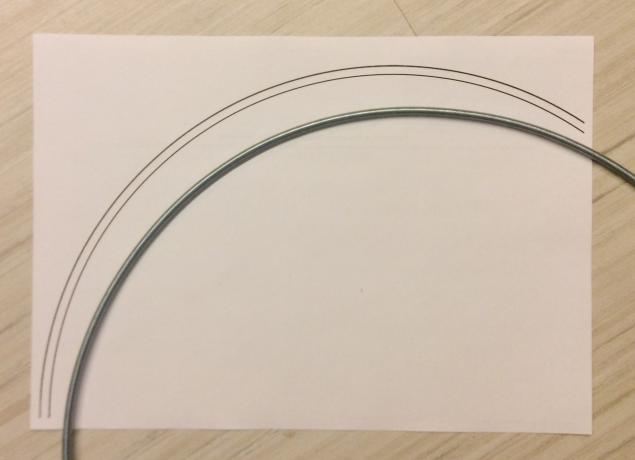
Para llevar a cabo la precisión fue mayor pin doblar el arco. Esto se hace por la impresora para imprimir dos círculos concéntricos de diámetro derecha de modo que sus bordes han sido pernos de envolvente. Y poco a poco Gnehm y constantemente aplicarnos a la plantilla, el registro. Es mejor doblar toda la varilla (su longitud es de 1 metro) - por lo que es más fácil. Corto - no doblar suavemente las manos. 10 minutos todo estaba listo.
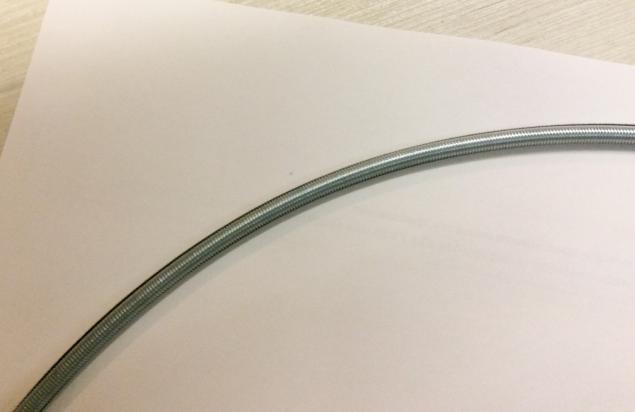
Dremel cortar el exceso. Salí de un segmento de unos 25 centímetros. Eso es suficiente para más de 5 horas de hacer.
Poniendo todo junto:

Compruebe la rotación en un bosquejo escrito previamente para Arduino.

Buscar en Google, descubrí que se pueden comprar fácilmente. Pero eso es la picadura de precios. Por ejemplo, la más barata Vixin Ploarie estrella Rastreador cuesta $ 400 + de la entrega. Sí y levantando la duda. En el futuro, pensaba ir de objetivo gran angular y un 70-200 / 2.8 que se incluye con la cámara pesa menos de medio kg.
En la búsqueda resultó que las personas hacen a sí mismos llamados Barn Door Trackers: , два y другие. En pocas palabras - la puerta del cobertizo. El principio de funcionamiento es simple - dos placas conectadas por una puerta dosel. Uno de ellos se hace girar a la misma velocidad que la tierra alrededor de su eje. El eje de la copa siempre apunta a Polaris. El tablero inferior se coloca en un trípode y se coloca en la cabeza del trípode media móvil con la cámara.
Bajo la corte una gran cantidad de imágenes.
Me puse a tratar de hacer este rastreador. Porque sin ella sólo se puede disparar pistas estelares de este tipo.

Según estimaciones para este casi todo estaba a la mano. Decidimos tomar como base este tracker. Hay que tener una descripción de la metodología de cálculo de los parámetros básicos.
El material ha sido seleccionado para 10mm dostochek MDF como fue la experiencia de corte por láser en el estudio. El material es barato, fácil de usar. En términos de fiabilidad demasiado pronto para decirlo. Mira la operación de prueba.
En primer lugar, en el programa de CAD dibujé un modelo de lo que debería haber hecho. Para ello era necesario calcular el radio y la velocidad de rotación de la viga. Por mi radio de estimación resultó 182.85mm para pernos M5 con paso de 0,8 mm de rosca y tuerca de velocidad 1 / min. Horquilla M5 fue elegido como un compromiso entre resistencia y paso de rosca.


Porque posteriormente querido disparar a 70-200 / 2.8 entonces tenía que contar la cantidad de pasos que el motor se puede hacer en un minuto que no había desenfoque dentro de un solo píxel. Después de todo lo que hice por diez prikidok margen de error que no fabricaría diseño empeoró dramáticamente la situación.

Para girar la tuerca en la isla en el diseño original del arte utilizado. Pero para encontrar los artículos para el dinero suficiente y no funcionó. Tolna estaban en e-bay y luego a $ 10 + mes entrega. Por lo tanto, los engranajes también decidieron cortar por láser de MDF o acrílico.


Como motor paso a paso utilizado chino 28BYJ-48. Su larga pongo varias piezas, todos querían jugar. Se paran con el controlador de la tarjeta es de menos de $ 2 en la entrega de eBay. Está alimentado 5-12 voltios. Hace una revolución del eje de los 64 pasos. También cuenta con una caja de cambios con koefitsientom cerca de 63.68395: 1. Así, el eje externo se gira en pasos 2037 modo de 4 pasos o 4075-pasos en el modo de 8 pasos. Torque no es grande, pero para este problema es más que suficiente. En Internet, escriben que volvió a por él en el orden de 15 / min, pero con un aumento de potencia de hasta 12V. Decidí que era suficiente para mí 4 rev / min e hice la relación de transmisión. 4: 1 que sería para cuatro vueltas de la tuerca del motor en el espárrago da una vuelta


En la tienda me compré una puerta del cobertizo con holgura mínima. Su tamaño y anchura se convirtieron en dostochek. También ha comprado una horquilla. En otra tienda marcó fijaciones. En sujetadores, corte MDF, bucle tomó cerca de 100 USD. ($ 8,3). En ebay ordenado una rótula pequeña pero hasta ahora ha puesto el viejo trípode convencional.
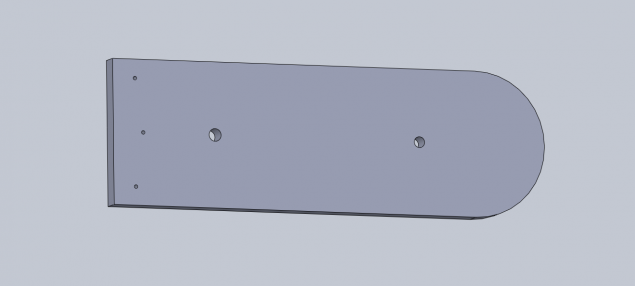
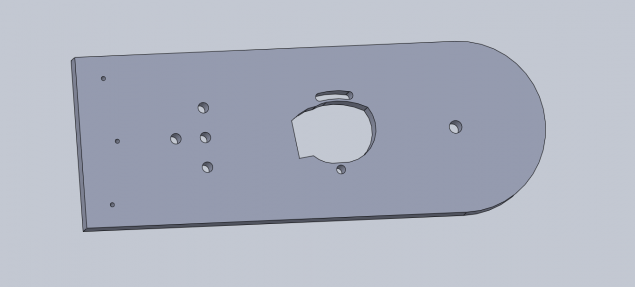
En la mitad inferior hice orificios para la instalación de una cabeza desmontable plataforma foto Manfrotto 804RC2 entretenía yo. También hizo los agujeros para el motor. He proporcionado un ajuste de la distancia entre los engranajes de rotación alrededor de uno de los agujeros de montaje del motor.
Cuando estaba satisfecho con los dibujos, lo llevé a cortar y traje aquí son maravillosos, pero con olores fuertes humos detalles.

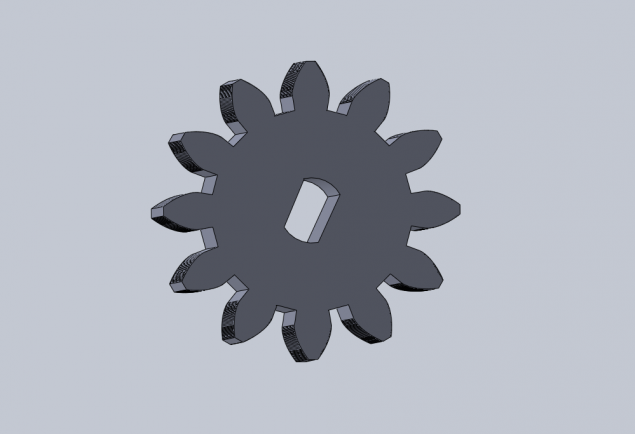
Engranajes y corte de acrílico y MDF. Con acrílico convertido malos extremos de los poplavilis dientes. Tuve que tratarlos con un archivo. Subjetivamente, en el curso de MDF se volvió más suave. Pero mira en el campo de batalla.

La fijación de la rueda dentada a la tuerca es muy simple - un agujero en forma de hexágono de tolerancia. Acrílico - 8mm. Sólo hay que poner el 2 tuercas M5.

Para llevar a cabo la precisión fue mayor pin doblar el arco. Esto se hace por la impresora para imprimir dos círculos concéntricos de diámetro derecha de modo que sus bordes han sido pernos de envolvente. Y poco a poco Gnehm y constantemente aplicarnos a la plantilla, el registro. Es mejor doblar toda la varilla (su longitud es de 1 metro) - por lo que es más fácil. Corto - no doblar suavemente las manos. 10 minutos todo estaba listo.


Dremel cortar el exceso. Salí de un segmento de unos 25 centímetros. Eso es suficiente para más de 5 horas de hacer.
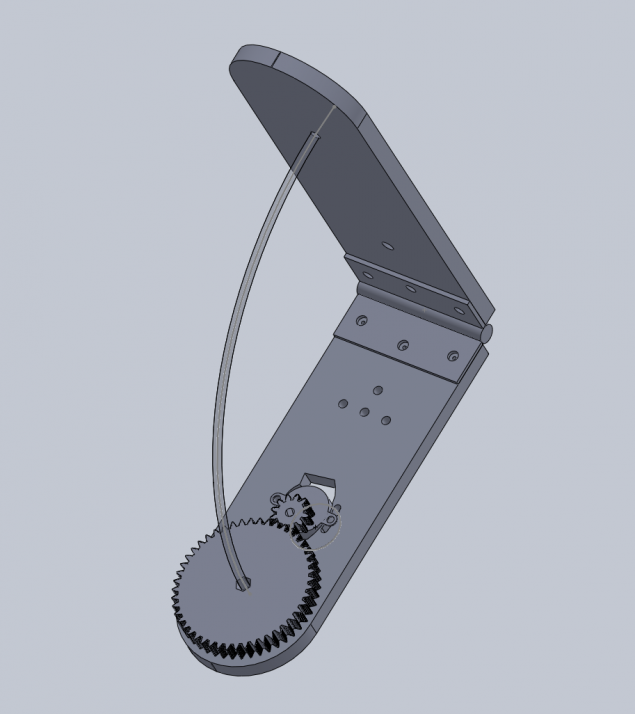
Poniendo todo junto:

Compruebe la rotación en un bosquejo escrito previamente para Arduino.
& lt; code class = & quot; cpp & quot; & gt; #include & lt; AccelStepper.h & gt; # include & lt; LiquidCrystal.h & gt; 8 #define medio paso LiquidCrystal lcd (8, 13, 9, 4, 5, 6, 7); int adc_key_val [5] = {50, 200, 400, 600, 800}; Definiciones pin // Motor #define motorPin1 3 // IN1 en el conductor ULN2003 1 #define motorPin2 4 // IN2 en el conductor ULN2003 1 #define motorPin3 5 // IN3 en el conductor ULN2003 1 #define motorPin4 6 // IN4 en el conductor ULN2003 1 int NUM_KEYS = 5; int adc_key_in; clave int = -1; int isRun; velocidades dobles = 271,6; int maxspeed = 1,245; AccelStepper stepper1 (medio paso, motorPin1, motorPin3, motorPin2, motorPin4); void setup () {lcd.clear (); lcd.begin (16, 2); lcd.setCursor (0, 0); lcd.print (& quot; Detenido & quot;); lcd.setCursor (0, 1); lcd.print (& quot; Speed & quot;); lcd.print (velocidades); lcd.print (& quot; & quot;); isRun = 0; stepper1.setMaxSpeed (maxspeed); stepper1.setSpeed (velocidades); } Lazo vacío () {adc_key_in = analogRead (0); // Lea el valor de la clave del sensor = get_key (adc_key_in); // Convertir en pulsar la tecla si (clave & gt; = 0) // si se detecta presión de tecla {if (== tecla 1) {velocidades + = 0,1; de retardo (50); } Si (== tecla 2 & amp; & amp; velocidades & gt; 0) {velocidades - = 0,1; de retardo (50); } Si (== tecla 0) {velocidades + = 10; } Si (== clave 3) {velocidades - = 10; } If (velocidades & gt; MAXSPEED) {velocidades = maxspeed; } If (velocidades de & lt; -maxspeed) {velocidades = -maxspeed; } Si (== clave 4) {isRun = 1 - isRun; lcd.setCursor (0, 0); si (== isRun 1) {lcd.print (& quot; +++ +++ Running & quot;); } Else {lcd.print (& quot; Detenido & quot;); } Delay (250); Lcd.setCursor} (0, 1); lcd.print (& quot; Speed & quot;); lcd.print (velocidades); lcd.print (& quot; & quot;); stepper1.setSpeed (velocidades); de retardo (50); } Si (== isRun 1) {stepper1.runSpeed (); }} Int get_key (unsigned int entrada) {int k; para (k = 0; k & lt; NUM_KEYS; k ++) {if (entrada & lt; adc_key_val [k]) return k; } Si (k & gt; = NUM_KEYS) k = -1; // No tecla pulsada k vuelta válido; } & Lt; / Código & gt; pre>
Utilicé el Teclado LCD Escudo que sería conveniente para recoger la velocidad de rotación.
Hay kpopka Start / Stop. No aumentar / disminuir en 25 pasos y 0,1 paso. La velocidad se mide en metros por segundo. La velocidad de diseño debe ser 271,6 pasos por segundo. Pero echa un vistazo aún porque no puedo constantemente llueve.
Vista general de la estructura resultante
Hay dos Arduino. No le hagas caso. Uno se utiliza como una fuente de energía para el motor.
Proceso de vídeo funciona
Ahora el clima es desagradable. Lluvias. Una vez que se ve la estrella proceder a montar las pruebas en el campo.
Fuente: habrahabr.ru/post/227499/























La idea más popular de robots en Kickstarter
Oculus compra un grupo de los mejores diseñadores industriales