3543
Astrotreker两晚
阅读业余天文学家的我开始尝试采取与普通相机的明星的照片没有望远镜。文章建议有关astrotrekery的想法 - 设备补偿天空上的长时间曝光的旋转。

谷歌搜索,我发现,他们可以很容易买到。但是,这是价格的叮咬。例如,最便宜的Vixin Ploarie星跟踪器售价为400美元+交货。是的,解除他的疑虑。在未来,我计划从广角镜头去附带相机70-200 / 2.8下半公斤重。
在搜索横空出世,人们做自己所谓的谷仓门跟踪器:次的,<一个href="http://petapixel.com/2013/08/10/buidling-a-diy-barn-door-tracking-mount-for-long-exposure-astrophotography/">два和<一href="https://www.google.com/search?q=barn+door+track+mount&espv=2&source=lnms&tbm=isch&sa=X&ei=QdmpU5nbH63b7AbdzoGAAg&ved=0CAYQ_AUoAQ&biw=1536&bih=786">другие.简单地说 - 棚的门。其工作原理很简单 - 两个委员会由篷门相连。其中之一旋转时相同的速度绕其轴线大地。天篷的轴始终瞄准北极星。底部板被放置在三脚架上并放置在可动半脚架头与相机。
下砍了不少照片。
我开始试图让这个跟踪器。因为没有它,你只能拍这种类型的恒星轨道。

据估计这几乎一切都在手边。决定采取为基础这个跟踪器。有你有基本参数计算方法的说明。
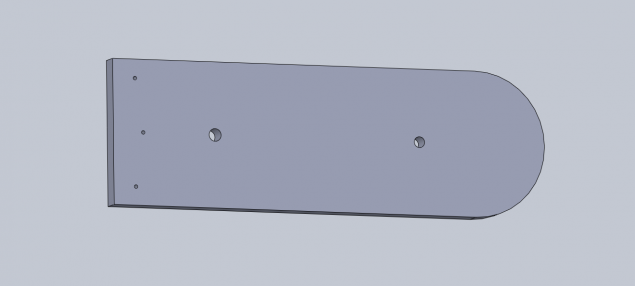
该材料已被选定为dostochek10毫米密度板作为它是激光切割在工作室的经验。该材料是便宜的,容易使用。在可靠性方面远远言之尚早。看试运行。
首先,在CAD程序,我画了什么应该已经做了模型。要做到这一点,有必要计算该螺柱的半径和旋转速度。按我的估计半径转向182.85毫米为M5螺栓,具有0.8mm螺距和速度螺母1 /分。发夹M5被选为强度和螺距之间的折衷。
因为后来想拍摄的70-200 / 2.8则不得不算多少步电机做在一分钟内有内单个像素不模糊。毕竟我没有prikidok十倍的误差率,不会制造设计急剧恶化的情况。
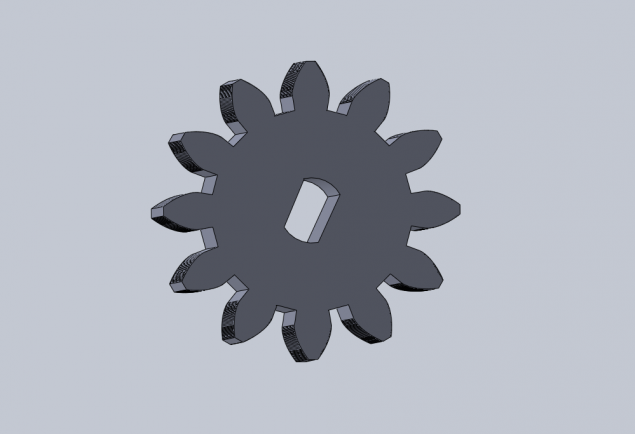
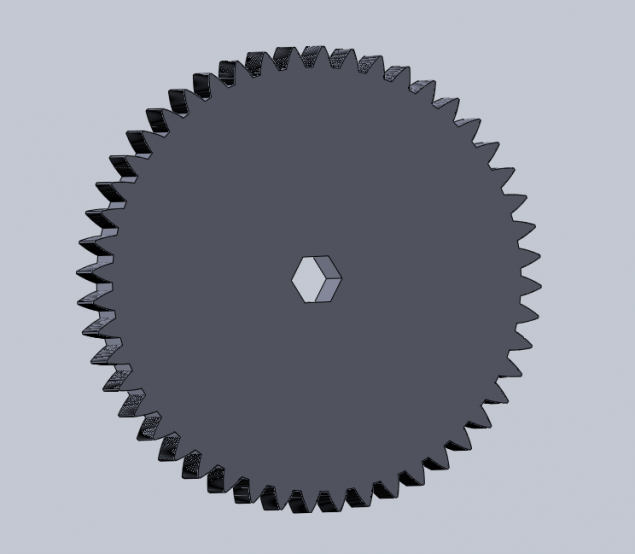
旋转的螺柱螺母中所使用的齿轮的原始设计。但要找到足够的钱齿轮和没有工作。托尔瑙是在电子湾,然后10元+交割月份。因此,齿轮也决定下调MDF或丙烯酸激光。
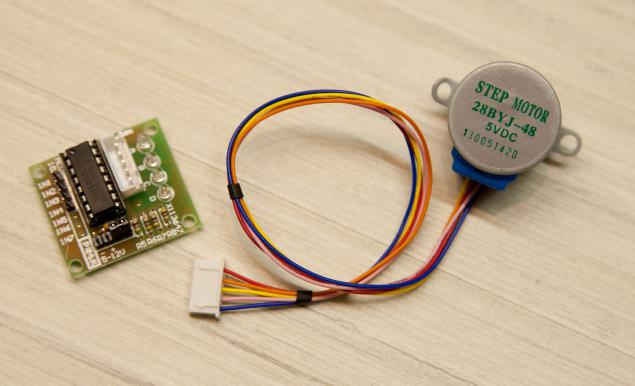
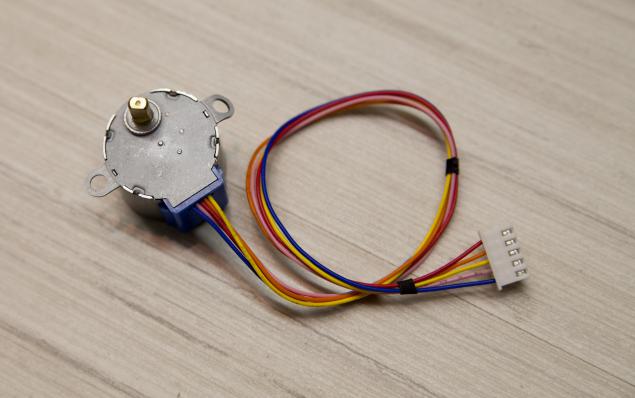
由于使用中国28BYJ-48步进电机。他们长期我躺在几件,都希望发挥。他们站在与卡控制器不到2美元在eBay上交付。它是由5-12伏供电。使的64步在轴的一转。它也有koefitsientom接近63.68395变速箱:1。因此,外轴在步骤2037旋转4步模式或4075步中的8步模式。扭矩他是不是很大,但对于这个问题,它是绰绰有余。在互联网上,写的横空出世,让他为15 /分的顺序,但增加了功率高达12V。我决定,这是足以让我4转/分,使齿轮比4:1,这将是对四圈上的螺栓在发动机螺母的旋转一周
在店里我买了一个棚门以最小的反弹。它的大小和宽度成为dostochek。还有买了一个发夹。在另一家商店取得了定价。紧固件,切割密度板,环路花了大约100美元。 ($ 8.3)。在eBay上订购了小丸子头,但到目前为止已经把旧的传统的三脚架。
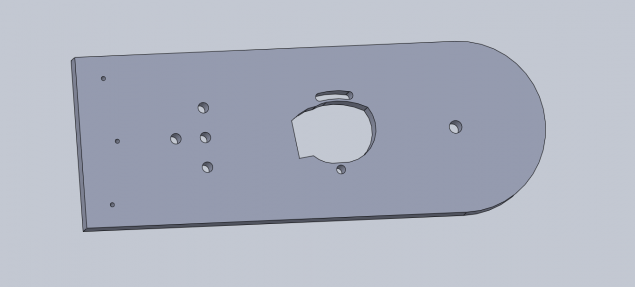
在下半区我做了孔连接到移动平台上的照片头曼富图804RC2消磨我。也使孔的发动机。我已经提供由旋转齿轮之间的距离调整围绕电动机安装孔中的一个。
当我高兴的图纸,我带他去切带到这里是美妙的,但强烈气味的烟雾细节。
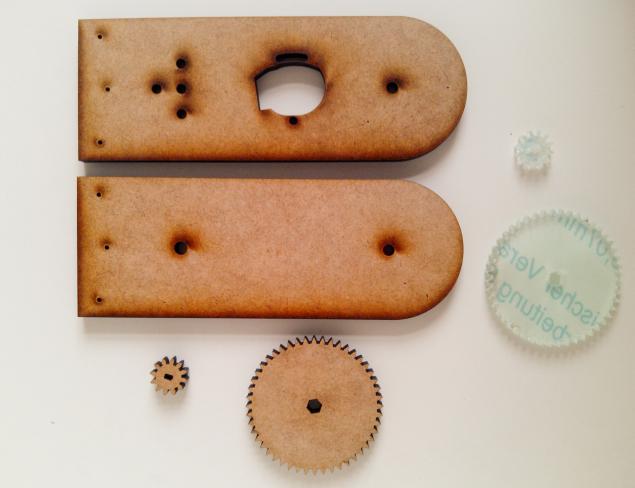
齿轮和切出丙烯酸和中密度纤维板。丙烯酸转身的牙齿poplavilis坏的结束。我只好用锉刀对待他们。主观上,在密度板的过程中变成柔和。但看在战场上。
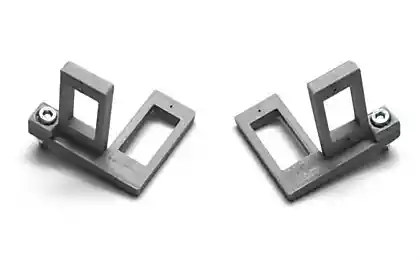
固定齿轮与螺母是很简单的 - 在六边形耐受形式的孔。丙烯酸 - 8毫米。只要把2个螺母M5。

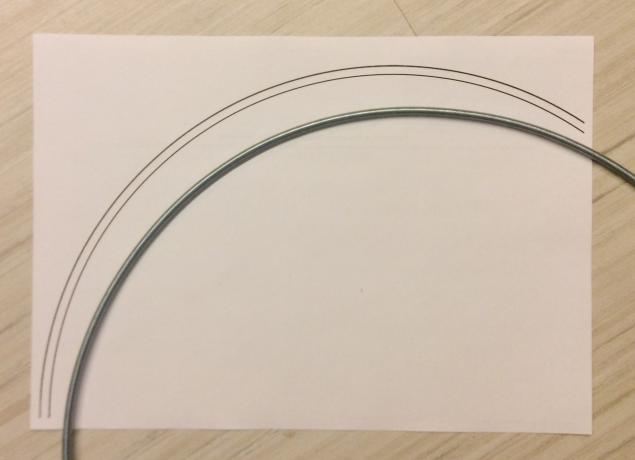
为了进行精度较高销弯曲的弧线。这是由打印机进行打印两个同心圆右直径,使得它们的边缘已经信封螺栓。慢慢奈姆它不断自我应用于模板,检查。这是更好地弯曲了整个杆(其长度为1米) - 所以它更容易。短期 - 不要弯曲轻轻地手。 10分钟一切准备就绪。
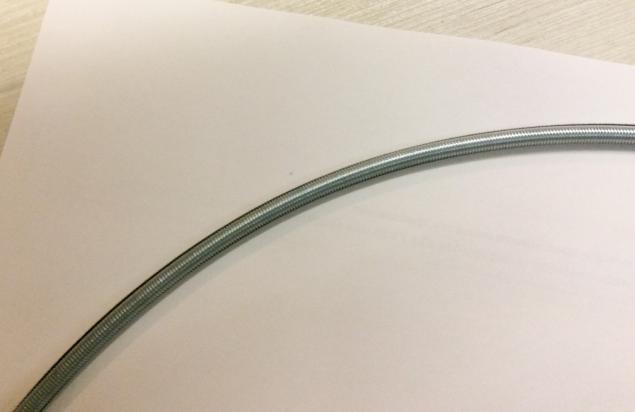
的Dremel切掉多余的。我留下了约25厘米的段。这足以让5个多小时做。
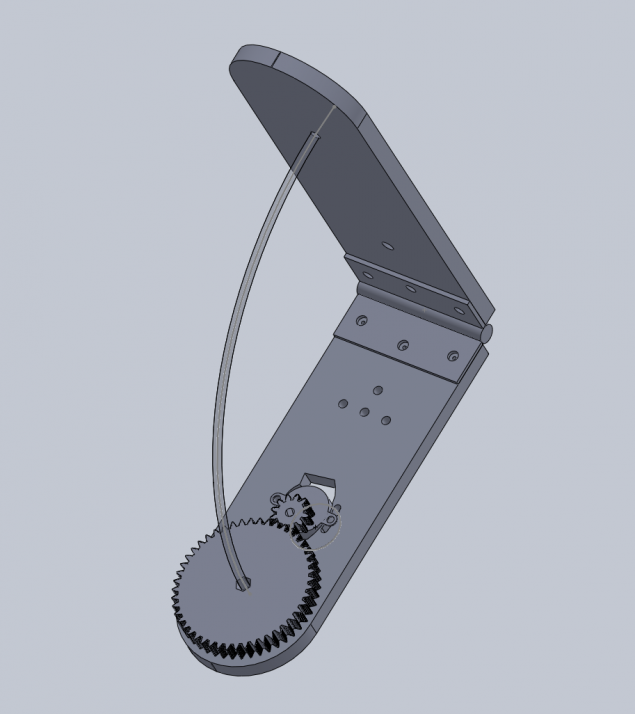
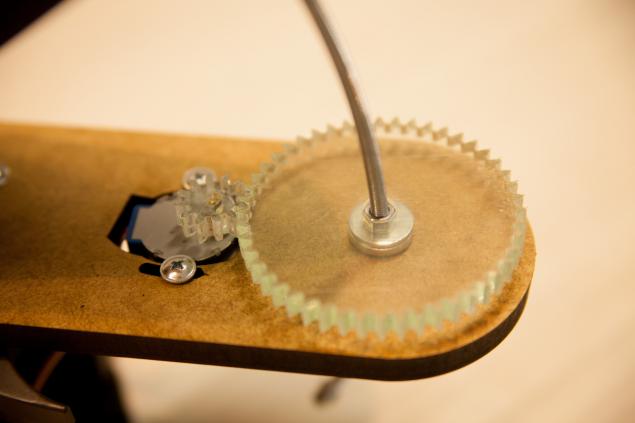
全部放在一起:

检查预先写好的草图Arduino的旋转。
<前>&LT;代码级=&QUOT; CPP&QUOT;&GT;的#include&LT; AccelStepper.h&GT; #包括LT&; LiquidCrystal.h&GT; 8的#define HALFSTEP LiquidCrystal LCD(8,13,9,4,5,6,7);整型adc_key_val [5] = {50,200,400,600,800}; //电机引脚定义#定义motorPin1 3 // IN1上ULN2003驱动器1的#define motorPin2 4 // IN2上ULN2003驱动器1的#define motorPin3 5 // IN3上ULN2003驱动器1的#define motorPin4 6 // IN4上ULN2003驱动1 INT NUM_KEYS = 5; INT adc_key_in; INT键= -1; INT isRun;双速= 271.6; INT MAXSPEED = 1245; AccelStepper stepper1(HALFSTEP,motorPin1,motorPin3,motorPin2,motorPin4);无效设置(){lcd.clear(); lcd.begin(16,2); lcd.setCursor(0,0); lcd.print(QUOT;停止&QUOT); lcd.setCursor(0,1); lcd.print(&QUOT;速度和QUOT;); lcd.print(速度); lcd.print(QUOT;&QUOT); isRun = 0; stepper1.setMaxSpeed(MAXSPEED); stepper1.setSpeed(速度); }空环(){adc_key_in = analogRead(0); //读取从传感器键= get_key(adc_key_in)的值; //转换成按键,如果(钥匙&GT; = 0)//如果按键被检测到,如果{(关键== 1){速度+ = 0.1;延迟(50); }如果(标号== 2&安培;&安培;速度大于0){速度 - = 0.1;延迟(50); }如果(键== 0){+速度= 10; }如果(键== 3){速度 - = 10; }如果(速度&GT; MAXSPEED){速度= MAXSPEED; }如果(速度&LT; -maxspeed){速度= -maxspeed; }如果(键== 4){isRun = 1 - isRun; lcd.setCursor(0,0); ;若(isRun == 1){lcd.print(QUOT +++跑步+++ QUOT) }其他{lcd.print(&QUOT;停止&QUOT;); }延迟(250); } Lcd.setCursor(0,1); lcd.print(&QUOT;速度和QUOT;); lcd.print(速度); lcd.print(QUOT;&QUOT); stepper1.setSpeed(速度);延迟(50); }如果(isRun == 1){stepper1.runSpeed(); }}诠释get_key(无符号整数输入){INT K表;对于(K = 0; K&LT; NUM_KEYS; k ++){如果(输入&LT; adc_key_val [K])的回报K表; }如果(K&GT; = NUM_KEYS)K = -1; //没有有效的键按下复位K; }&中尉; /码&GT; PRE>
我用的LCD面板盾,这将是方便拿起转速。

有kpopka启动/停止。有递增/递减25步和0.1步。速度的单位是米每秒。设计速度应该是每秒271.6步骤。但检查出来呢,因为我不能不断下雨。
所得结构
的普遍看法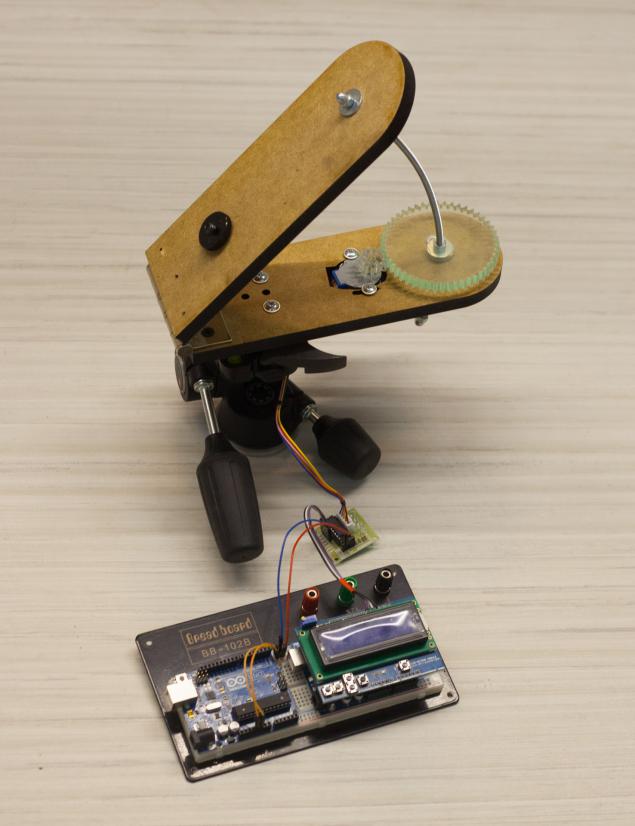
有两个Arduino的。不重视。一个用作动力源的马达。
视频处理工作
现在的天气是很讨厌。淋浴。一旦星可以看出进行安装测试的领域。
来源: habrahabr.ru/post/227499/

谷歌搜索,我发现,他们可以很容易买到。但是,这是价格的叮咬。例如,最便宜的Vixin Ploarie星跟踪器售价为400美元+交货。是的,解除他的疑虑。在未来,我计划从广角镜头去附带相机70-200 / 2.8下半公斤重。
在搜索横空出世,人们做自己所谓的谷仓门跟踪器:次的,<一个href="http://petapixel.com/2013/08/10/buidling-a-diy-barn-door-tracking-mount-for-long-exposure-astrophotography/">два和<一href="https://www.google.com/search?q=barn+door+track+mount&espv=2&source=lnms&tbm=isch&sa=X&ei=QdmpU5nbH63b7AbdzoGAAg&ved=0CAYQ_AUoAQ&biw=1536&bih=786">другие.简单地说 - 棚的门。其工作原理很简单 - 两个委员会由篷门相连。其中之一旋转时相同的速度绕其轴线大地。天篷的轴始终瞄准北极星。底部板被放置在三脚架上并放置在可动半脚架头与相机。
下砍了不少照片。
我开始试图让这个跟踪器。因为没有它,你只能拍这种类型的恒星轨道。

据估计这几乎一切都在手边。决定采取为基础这个跟踪器。有你有基本参数计算方法的说明。
该材料已被选定为dostochek10毫米密度板作为它是激光切割在工作室的经验。该材料是便宜的,容易使用。在可靠性方面远远言之尚早。看试运行。
首先,在CAD程序,我画了什么应该已经做了模型。要做到这一点,有必要计算该螺柱的半径和旋转速度。按我的估计半径转向182.85毫米为M5螺栓,具有0.8mm螺距和速度螺母1 /分。发夹M5被选为强度和螺距之间的折衷。


因为后来想拍摄的70-200 / 2.8则不得不算多少步电机做在一分钟内有内单个像素不模糊。毕竟我没有prikidok十倍的误差率,不会制造设计急剧恶化的情况。

旋转的螺柱螺母中所使用的齿轮的原始设计。但要找到足够的钱齿轮和没有工作。托尔瑙是在电子湾,然后10元+交割月份。因此,齿轮也决定下调MDF或丙烯酸激光。


由于使用中国28BYJ-48步进电机。他们长期我躺在几件,都希望发挥。他们站在与卡控制器不到2美元在eBay上交付。它是由5-12伏供电。使的64步在轴的一转。它也有koefitsientom接近63.68395变速箱:1。因此,外轴在步骤2037旋转4步模式或4075步中的8步模式。扭矩他是不是很大,但对于这个问题,它是绰绰有余。在互联网上,写的横空出世,让他为15 /分的顺序,但增加了功率高达12V。我决定,这是足以让我4转/分,使齿轮比4:1,这将是对四圈上的螺栓在发动机螺母的旋转一周


在店里我买了一个棚门以最小的反弹。它的大小和宽度成为dostochek。还有买了一个发夹。在另一家商店取得了定价。紧固件,切割密度板,环路花了大约100美元。 ($ 8.3)。在eBay上订购了小丸子头,但到目前为止已经把旧的传统的三脚架。
在下半区我做了孔连接到移动平台上的照片头曼富图804RC2消磨我。也使孔的发动机。我已经提供由旋转齿轮之间的距离调整围绕电动机安装孔中的一个。
当我高兴的图纸,我带他去切带到这里是美妙的,但强烈气味的烟雾细节。

齿轮和切出丙烯酸和中密度纤维板。丙烯酸转身的牙齿poplavilis坏的结束。我只好用锉刀对待他们。主观上,在密度板的过程中变成柔和。但看在战场上。

固定齿轮与螺母是很简单的 - 在六边形耐受形式的孔。丙烯酸 - 8毫米。只要把2个螺母M5。

为了进行精度较高销弯曲的弧线。这是由打印机进行打印两个同心圆右直径,使得它们的边缘已经信封螺栓。慢慢奈姆它不断自我应用于模板,检查。这是更好地弯曲了整个杆(其长度为1米) - 所以它更容易。短期 - 不要弯曲轻轻地手。 10分钟一切准备就绪。


的Dremel切掉多余的。我留下了约25厘米的段。这足以让5个多小时做。
全部放在一起:

检查预先写好的草图Arduino的旋转。
<前>&LT;代码级=&QUOT; CPP&QUOT;&GT;的#include&LT; AccelStepper.h&GT; #包括LT&; LiquidCrystal.h&GT; 8的#define HALFSTEP LiquidCrystal LCD(8,13,9,4,5,6,7);整型adc_key_val [5] = {50,200,400,600,800}; //电机引脚定义#定义motorPin1 3 // IN1上ULN2003驱动器1的#define motorPin2 4 // IN2上ULN2003驱动器1的#define motorPin3 5 // IN3上ULN2003驱动器1的#define motorPin4 6 // IN4上ULN2003驱动1 INT NUM_KEYS = 5; INT adc_key_in; INT键= -1; INT isRun;双速= 271.6; INT MAXSPEED = 1245; AccelStepper stepper1(HALFSTEP,motorPin1,motorPin3,motorPin2,motorPin4);无效设置(){lcd.clear(); lcd.begin(16,2); lcd.setCursor(0,0); lcd.print(QUOT;停止&QUOT); lcd.setCursor(0,1); lcd.print(&QUOT;速度和QUOT;); lcd.print(速度); lcd.print(QUOT;&QUOT); isRun = 0; stepper1.setMaxSpeed(MAXSPEED); stepper1.setSpeed(速度); }空环(){adc_key_in = analogRead(0); //读取从传感器键= get_key(adc_key_in)的值; //转换成按键,如果(钥匙&GT; = 0)//如果按键被检测到,如果{(关键== 1){速度+ = 0.1;延迟(50); }如果(标号== 2&安培;&安培;速度大于0){速度 - = 0.1;延迟(50); }如果(键== 0){+速度= 10; }如果(键== 3){速度 - = 10; }如果(速度&GT; MAXSPEED){速度= MAXSPEED; }如果(速度&LT; -maxspeed){速度= -maxspeed; }如果(键== 4){isRun = 1 - isRun; lcd.setCursor(0,0); ;若(isRun == 1){lcd.print(QUOT +++跑步+++ QUOT) }其他{lcd.print(&QUOT;停止&QUOT;); }延迟(250); } Lcd.setCursor(0,1); lcd.print(&QUOT;速度和QUOT;); lcd.print(速度); lcd.print(QUOT;&QUOT); stepper1.setSpeed(速度);延迟(50); }如果(isRun == 1){stepper1.runSpeed(); }}诠释get_key(无符号整数输入){INT K表;对于(K = 0; K&LT; NUM_KEYS; k ++){如果(输入&LT; adc_key_val [K])的回报K表; }如果(K&GT; = NUM_KEYS)K = -1; //没有有效的键按下复位K; }&中尉; /码&GT; PRE>
我用的LCD面板盾,这将是方便拿起转速。

有kpopka启动/停止。有递增/递减25步和0.1步。速度的单位是米每秒。设计速度应该是每秒271.6步骤。但检查出来呢,因为我不能不断下雨。
所得结构
的普遍看法

有两个Arduino的。不重视。一个用作动力源的马达。
视频处理工作
现在的天气是很讨厌。淋浴。一旦星可以看出进行安装测试的领域。
来源: habrahabr.ru/post/227499/