719
蟑螂机器人运行迅速,轻松地克服障碍
一只蟑螂,蟑螂,tarakashechka,
小女孩试图Zhidkonogaya-bukashechka。
根Chukovsky,“蟑螂» I>
来自加州大学,<一个工程师href="https://www.theverge.com/2015/6/22/8826355/cockroach-robot-university-of-berkeley-california">изготовили微型机器人,它可以巧妙地克服障碍,不使用任何传感器,用于环境分析。以一个线索,从蟑螂,研究者们提供了机器人的椭圆形“壳”,这让他摆脱困难的情况。乔布斯发表在杂志 Bioinspiration与仿生学。
智能移动机器人,克服障碍,通常配有各种传感器,摄像头,测距仪,和周围空间的绘画智能建筑。复杂的算法确定可以通过崎岖地形获得的最佳途径。但是,正如作者解释与大量的障碍物的大小相当或比机器人的尺寸稍小的工作,这种方式开始面对严重的困难。
起初,他们的机器人呈长方形。已经造成的角落,它成为障碍纠缠。然后,他们决定用茶水大自然,也就是进化性质的丰富经验,并给你的机器人流线型。这种做法,他们聚集在热带蟑螂。那些生活在植被茂密的地面,并感谢其椭圆形的贝壳,经过相当巧妙的障碍推。
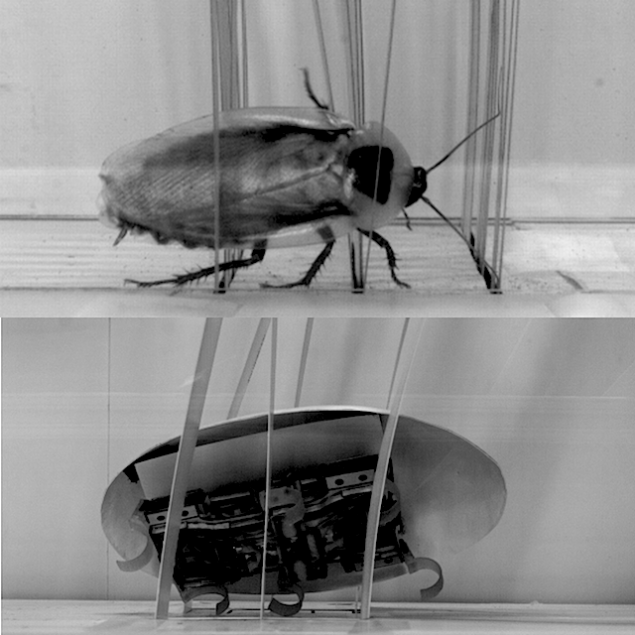
面临的障碍,tarakashki只是倾斜侧身体,因而挤过草或其他物体的叶片。缺乏角落不允许他们不放任何东西。
因此,研究人员装甲,并配有他的六腿机器人。无需任何额外的传感器和变化的算法,这是很轻快地涉水通过异物 - 更不用提如何快速做它,相反平时慢的机器人,能在表面上走动
我立刻想起了一个简单的机器人在他辉煌的创作从波士顿动力学机器人工程师 - 也六腿机器人RHex 。利用作为驱动力的旋转只是他的弹性灵活的“脚”普通电机,他不只是踏着轻快地在一个平面上,同时也非常有信心克服各种地形,能跳,甚至游泳。
来源: geektimes.ru/post/252434/
小女孩试图Zhidkonogaya-bukashechka。
根Chukovsky,“蟑螂» I>

来自加州大学,<一个工程师href="https://www.theverge.com/2015/6/22/8826355/cockroach-robot-university-of-berkeley-california">изготовили微型机器人,它可以巧妙地克服障碍,不使用任何传感器,用于环境分析。以一个线索,从蟑螂,研究者们提供了机器人的椭圆形“壳”,这让他摆脱困难的情况。乔布斯发表在杂志 Bioinspiration与仿生学。
智能移动机器人,克服障碍,通常配有各种传感器,摄像头,测距仪,和周围空间的绘画智能建筑。复杂的算法确定可以通过崎岖地形获得的最佳途径。但是,正如作者解释与大量的障碍物的大小相当或比机器人的尺寸稍小的工作,这种方式开始面对严重的困难。
起初,他们的机器人呈长方形。已经造成的角落,它成为障碍纠缠。然后,他们决定用茶水大自然,也就是进化性质的丰富经验,并给你的机器人流线型。这种做法,他们聚集在热带蟑螂。那些生活在植被茂密的地面,并感谢其椭圆形的贝壳,经过相当巧妙的障碍推。

面临的障碍,tarakashki只是倾斜侧身体,因而挤过草或其他物体的叶片。缺乏角落不允许他们不放任何东西。
因此,研究人员装甲,并配有他的六腿机器人。无需任何额外的传感器和变化的算法,这是很轻快地涉水通过异物 - 更不用提如何快速做它,相反平时慢的机器人,能在表面上走动
我立刻想起了一个简单的机器人在他辉煌的创作从波士顿动力学机器人工程师 - 也六腿机器人RHex 。利用作为驱动力的旋转只是他的弹性灵活的“脚”普通电机,他不只是踏着轻快地在一个平面上,同时也非常有信心克服各种地形,能跳,甚至游泳。
来源: geektimes.ru/post/252434/