1770
辅助机器人手臂

其他机器人的四肢(DRC,编外机器人四肢(SRL)),人不可更换掉自己的手中,并通过扩大流动性,以补充他们。麻省理工学院开发的辅助roboruki将执行繁琐的,刺激性的,甚至是不可能的人类的工作。目前的原型,提出6月2日在国际会议上的机器人和自动化协会(IEEE国际会议上的机器人与自动化)。而且,这两个模型:第一个假肢从人的肩膀上开始,在第二 - 从腰部
。
肩部选项的目的是,当你需要的东西,移动或保持在高于人的头部高度,或者两手都要硬“载体”忙活了。

因为roboruki安装在靠近人的肩膀,置于其上的压力被转移到脊柱。每一个“手”具有5个自由度。 “刷子”是可替换的,它们可以被修改,该系统的总重量为4,5公斤。
主要特征是缺乏roboruk需要对它们进行管理。相反,他们看到它,你做什么,而“决定”如何移动。监测两个传感器的手段是“载体”把手腕上发生。第三传感器位于robomodulya的基极和跟踪在空间中的位置和整个模块的加速度。
刚果(金)使用来自陀螺仪和加速度计的数据,以“预测”有什么进一步的行动对他们的一部分将是“载体”最有用的。举例来说,如果一个人举起了双手举过头顶,机器人也抬高肢体,假设你需要的东西来保存。对原型研究制定出不同的行为场景必须进入机器人的软件。 “磨练我们的行为的算法,我们可以roboruki延续人体,”Beldin LLORENS - 博尼利亚(Baldin LLORENS - 博尼利亚),开发商一说。
刚果民主共和国的第二架原型机有一个连接点,以人的腰部区域。

创作者认为,这样的设计会特别有用的建设工作,保持物体或最“的媒体»。
大部分资金是由开发公司波音公司,这是有意创造的工具,以促进和加快飞机的建造提供。例如,此处显示为原型的刚果(金),固定在腰部,保持职工开展工作,安装在机身内部:

另一种方法是使用刚果(金)“II型” - 取消从人的腿的负荷:
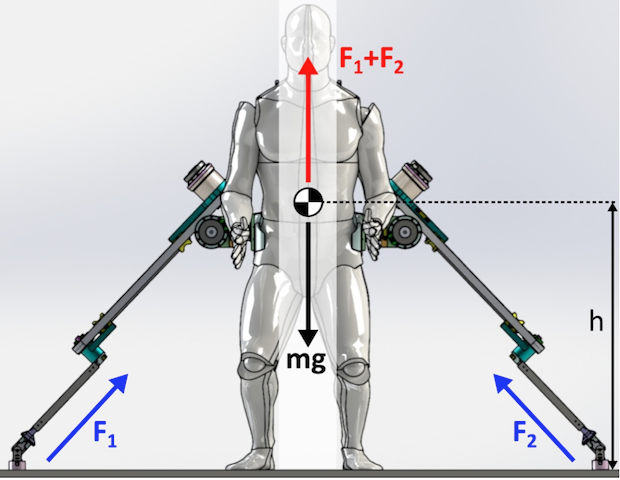
看来,有什么大惊小怪的,并没有<一个href="http://spectrum.ieee.org/at-work/innovation/raytheon-sarcoss-exoskeleton-nears-production">сразу全外骨骼?研究人员认为,目前的原型机外骨骼不能提供足够的流动性,他们扼杀了人类的运动。此外,外骨骼遵循所有的四肢,手和脚的动作,你是否希望它与否。一个DRC允许个人移动和更自由地行动。
资料来源: habrahabr.ru/post/225273/