841
Запуск і стрибки чотириногий робот
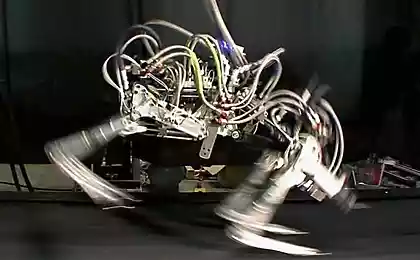
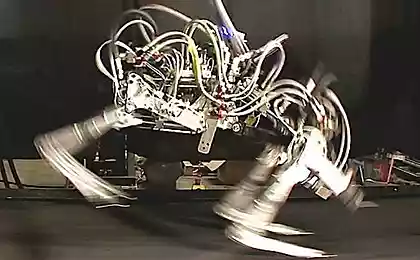
Дослідники з Массачусетського технологічного інституту розробили нові алгоритми, завдяки яким можна запустити невеликий чотириногий робот і стрибати досить швидко. Роботи називають Чеетою, і зважує майже стільки біологічних імен
Тепер робота прискорюється до швидкості близько 16 км / год. Тим не менш, дослідники вважають, що в поточній версії дизайну може досягати 50 км / год. Ключ до «розшукового алгоритму» був короткостроковим додатком певної сили до кожної ноги для підтримки заданої швидкості. В цілому, чим вище швидкість, тим сильніше робот повинен відштовхуватися від землі. Розробники вважають, що цей підхід (з позиції міцності тяги, не швидкість ноги) схожий на те, як працюють світові класи. Як Усаин Bolt. Це, з більшою силою, штовхання бігунка «флайса» трохи далі з однаковою частотою руху стопи.
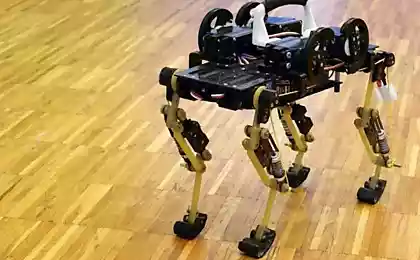
Для нової версії роботи розроблені електродвигуни з високим крутним моментом. При створенні «розшукового алгоритму», розробники продовжили з розрахунку сили, достатній для роботи, щоб подолати тяжіння і відключати землю. І тепер робот може переходити таким чином на різні швидкості. Для стрибків сила штовхача з ніжками збільшує кілька разів.
Джерело: habrahabr.ru/post/236931/


















Місцеві двигуни друкують автомобіль всього за 6 днів
Експерти ІСА обрали основні та альтернативні точки посадки для променя Філе/Росетта на приметі Чурюмов-Герасіменко