1700
Tiempo de vuelo
Ya sabes, me pregunto a veces extraña estructura de la opinión pública. Tomemos por ejemplo la tecnología 3D-visualización. La enorme protesta pública hizo que la reciente tecnología de gafas de realidad virtual: Oculus Rift , Google Glass . Pero no hay nada nuevo aquí, los primeros cascos de realidad virtual aparecieron a finales de los años 90. Sí, eran difíciles, que se adelantaron a su tiempo, pero entonces por qué no causaron un WOW-efecto? O 3D-impresoras. Artículos sobre la forma en que son frescos o la rapidez con que se apoderan del mundo aparecerá en el campo de la información dos veces por semana los últimos tres años. Yo no discuto, es fresco y el mundo que todavía captura. Pero esta tecnología fue creada en los años 80 y desde entonces lentamente avanza. 3D-TV? año 1915 ...
Todas estas tecnologías son agradables y curioso, pero la cantidad de bombo porque cada estornudar?
¿Qué pasa si digo que en los últimos 10 años fue inventado, desarrollado e introducido en la tecnología de producción en masa de disparos en 3D es muy diferente de cualquier otro? En esta tecnología ya se utiliza ampliamente. Bien establecido y accesible a la gente común en las tiendas. ¿Ha oído hablar de él? (Probablemente los únicos expertos en robótica y campos relacionados de la ciencia ya han adivinado que estoy hablando de los TOF-cámara).

¿Qué es una cámara TOF? En la Wikipedia rusa ( Inglés ) que no encontrará siquiera una mención de su corta que es. «Tiempo de vuelo cámara» se traduce como "cámara Vremyaprolёtnaya." La cámara determina la distancia por la velocidad de la luz mediante la medición del tiempo de vuelo de la señal de luz emitida por la cámara, y reflejada por cada punto de la imagen. Los estándares de hoy en día es una matriz de 320 * 240 píxeles (la próxima generación será de 640 * 480). La cámara proporciona mediciones precisas de la profundidad de alrededor de 1 pulgada. Sí. Matriz de 76.800 sensores que aseguran una medición precisa de tiempo del orden de 1/10, 000, 000, 000 (10 ^ -10) de un segundo. En venta. Por 150 dólares. Y usted puede incluso utilizarlo.
Y ahora un poco más sobre la física, principios de funcionamiento, y donde conociste a esta belleza.
Hay tres tipos principales de TOF-cámaras. Para cada uno de los tipos de usos de su posición del punto de medición de alcance tecnología. La más sencilla y clara - «Pulsada modulación» alias «cámaras directa Tiempo de vuelo». Dada impulso y en cada punto de la matriz se mide el tiempo exacto de su regreso:
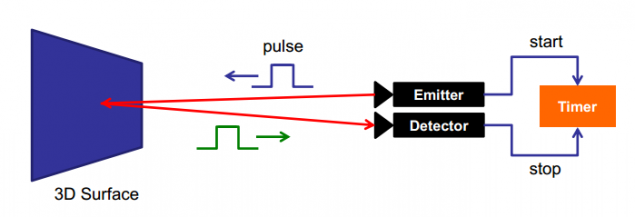
De hecho, la matriz se compone de factores desencadenantes que disparan en el frente de onda. El mismo método se utiliza para una síncronos destellos ópticos. Sólo aquí por orden de exactitud. Esa es la principal y la complejidad del método. Requiere de detección muy precisa del tiempo de respuesta, lo que requiere soluciones técnicas específicas (sin - no pude encontrar). Ahora la NASA está probando estos sensores para sus módulos de aterrizaje кораблей.
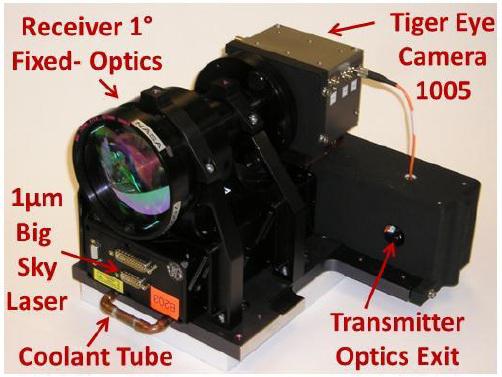
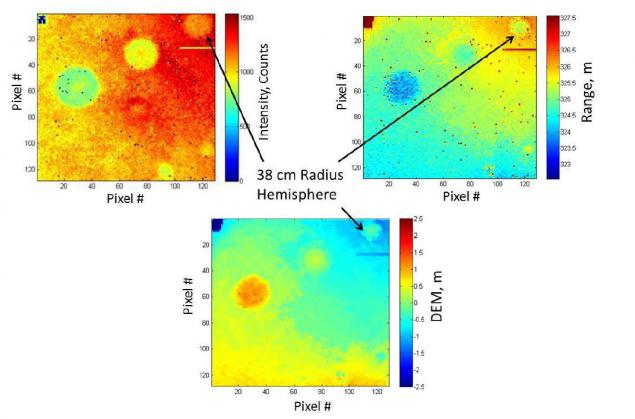
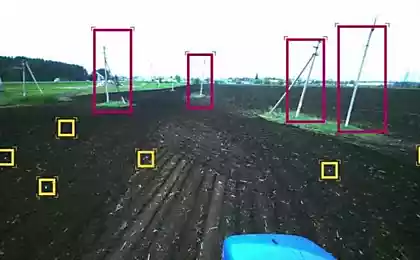
Pero la imagen que produce:
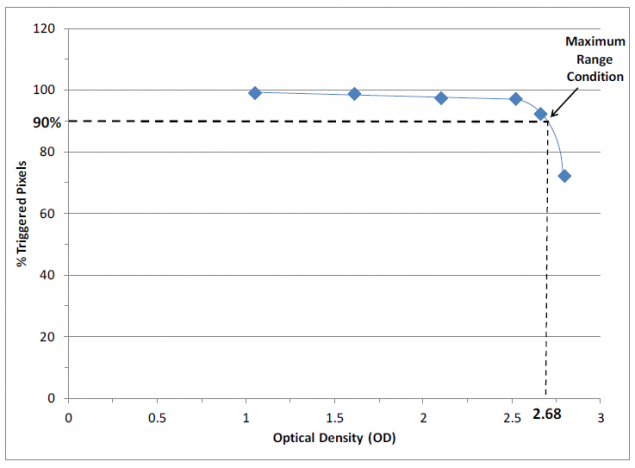
Luz de fondo en ellos suficiente para desencadenar incendios en el flujo de óptica reflejada desde una distancia de aproximadamente 1 kilómetro. El gráfico muestra el número de píxeles activadas en la matriz de acuerdo con la distancia de trabajo de 90% a una distancia de 1 km:
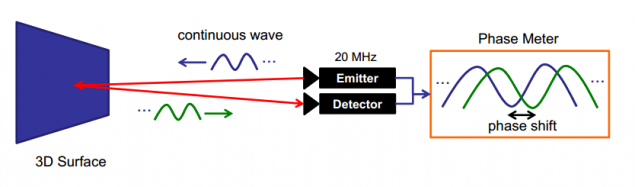
La segunda manera - la señal de modulación constante. El transmisor emite una cierta onda modulada. El receptor es una correlación máxima de lo que ve con esta ola. Esto determina el tiempo que la señal pasó sobre ella para reflexionar y llegar al receptor.
Deje que la señal emitida:
donde w - la frecuencia de modulación. A continuación, la señal recibida se verá así:

donde b-un cambio, una amplitud. La correlación de las señales entrantes y salientes:

Pero la correlación completa con todos los cambios posibles en el tiempo para hacer lo suficientemente difícil para tiempo real en cada píxel. Por lo tanto, el uso de una astucia oídos finta. La señal resultante es tomada en 4 píxeles adyacentes con un desplazamiento de fase 90⁰ y se correlacionó con sí mismo:

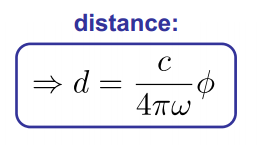
A continuación, el desplazamiento de fase se define como:
Conociendo el desplazamiento de fase resultante y la velocidad de la luz para obtener la distancia del objeto:
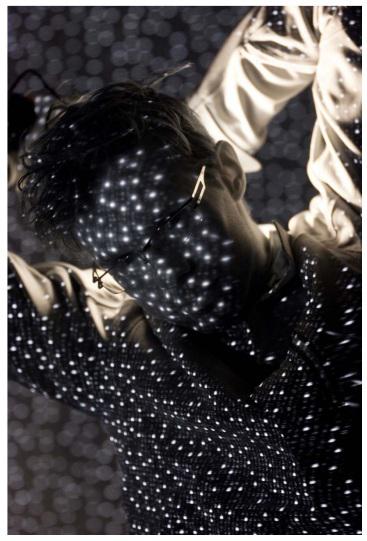
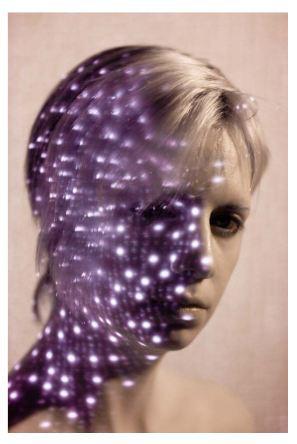
Estas cámaras son un poco más simple que las que se basan en la tecnología de primera, pero aún complejo y costoso. Aquí esta empresa Hace. Y son del orden de 4килобаксов. Pero simpatishnye y futurista:

La tercera tecnología - & quot; Rango de imágenes & quot cerradas;. Esencialmente deslizar la cámara. La idea aquí es simple y al horror no requiere receptores de alta precisión o correlación compleja. Antes de matriz vale la pena el obturador. Supongamos que tenemos que es perfecto y funciona al instante. En el tiempo 0, la escena de iluminación. El obturador está cerrado en el tiempo t. Entonces, los objetos que se encuentran más lejos de lo que t / (2 ∙ c), donde c - velocidad de la luz no será visible. Luz simplemente no tiene tiempo para volar con ellos y volver. Punto situado cerca de la cámara será cubierto en todo momento y tener la exposición t brillo I. Por lo tanto, cualquier punto de la exposición será el brillo de 0 a I, y esto es una representación de la luminosidad de la distancia al punto. El más brillante - cuanto más cerca
. Ha terminado en sólo un par de pequeñas cosas: entrar en el modelo, mientras que el obturador se cierra y el comportamiento de la matriz en el evento, no idealidad de la fuente de luz (por una fuente puntual de luz y la dependencia de brillo de rango no es lineal), diferente reflectividad de los materiales. Esta es una tarea muy grande y complejo, que los autores han decidido dispositivos.
Tales cámaras son los más inexacta, pero el más simple y barato: la complejidad del algoritmo en ellos. ¿Quieres un ejemplo se ve como esta cámara? Aquí está:

Sí, en la segunda pena Kinect sólo una cámara como esta. Eso sí, no confundir el segundo con el primer Kinect (Habre érase una vez un artículo bueno y detallada donde todo se mezcla para arriba). En el primer Kinect utiliza iluminación estructurada . Aquí es donde la tecnología más antigua, menos fiables y más lento:
Antes había cámara infrarroja convencional, lo que se ve en el patrón proyectado. Sus distorsiones determinan el rango (comparación de métodos se puede encontrar aquí тут).
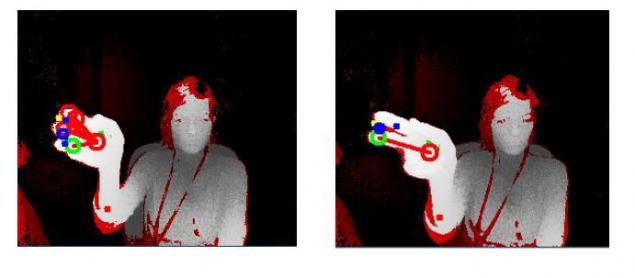
Pero Kinect no es el único representante del mercado. Por ejemplo Intel lanza cámara por $ 150, lo que da la imagen del mapa en 3D. Se centra en una zona cercana, pero tienen un SDK para el análisis de los gestos en el marco. Aquí hay otra вариант de Softkinetic (ellos también tienen el SDK, además de que son de alguna manera ligada a los instrumentos de Texas).


Yo mismo, aunque todavía no enfrenté con cualquiera de estas cámaras, lo cual es una pena y una vergüenza. Pero creo y espero que en cinco años van a entrar en la vida cotidiana y mi turno vendrán. Por lo que yo sé, se utilizan activamente en la orientación de los robots, la introducción de un sistema de reconocimiento por parte de los individuos. Gama de tareas y aplicaciones es muy amplia.
Fuente: habrahabr.ru/post/224605/
Todas estas tecnologías son agradables y curioso, pero la cantidad de bombo porque cada estornudar?
¿Qué pasa si digo que en los últimos 10 años fue inventado, desarrollado e introducido en la tecnología de producción en masa de disparos en 3D es muy diferente de cualquier otro? En esta tecnología ya se utiliza ampliamente. Bien establecido y accesible a la gente común en las tiendas. ¿Ha oído hablar de él? (Probablemente los únicos expertos en robótica y campos relacionados de la ciencia ya han adivinado que estoy hablando de los TOF-cámara).

¿Qué es una cámara TOF? En la Wikipedia rusa ( Inglés ) que no encontrará siquiera una mención de su corta que es. «Tiempo de vuelo cámara» se traduce como "cámara Vremyaprolёtnaya." La cámara determina la distancia por la velocidad de la luz mediante la medición del tiempo de vuelo de la señal de luz emitida por la cámara, y reflejada por cada punto de la imagen. Los estándares de hoy en día es una matriz de 320 * 240 píxeles (la próxima generación será de 640 * 480). La cámara proporciona mediciones precisas de la profundidad de alrededor de 1 pulgada. Sí. Matriz de 76.800 sensores que aseguran una medición precisa de tiempo del orden de 1/10, 000, 000, 000 (10 ^ -10) de un segundo. En venta. Por 150 dólares. Y usted puede incluso utilizarlo.
Y ahora un poco más sobre la física, principios de funcionamiento, y donde conociste a esta belleza.
Hay tres tipos principales de TOF-cámaras. Para cada uno de los tipos de usos de su posición del punto de medición de alcance tecnología. La más sencilla y clara - «Pulsada modulación» alias «cámaras directa Tiempo de vuelo». Dada impulso y en cada punto de la matriz se mide el tiempo exacto de su regreso:

De hecho, la matriz se compone de factores desencadenantes que disparan en el frente de onda. El mismo método se utiliza para una síncronos destellos ópticos. Sólo aquí por orden de exactitud. Esa es la principal y la complejidad del método. Requiere de detección muy precisa del tiempo de respuesta, lo que requiere soluciones técnicas específicas (sin - no pude encontrar). Ahora la NASA está probando estos sensores para sus módulos de aterrizaje кораблей.

Pero la imagen que produce:

Luz de fondo en ellos suficiente para desencadenar incendios en el flujo de óptica reflejada desde una distancia de aproximadamente 1 kilómetro. El gráfico muestra el número de píxeles activadas en la matriz de acuerdo con la distancia de trabajo de 90% a una distancia de 1 km:

La segunda manera - la señal de modulación constante. El transmisor emite una cierta onda modulada. El receptor es una correlación máxima de lo que ve con esta ola. Esto determina el tiempo que la señal pasó sobre ella para reflexionar y llegar al receptor.

Deje que la señal emitida:

donde w - la frecuencia de modulación. A continuación, la señal recibida se verá así:

donde b-un cambio, una amplitud. La correlación de las señales entrantes y salientes:


Pero la correlación completa con todos los cambios posibles en el tiempo para hacer lo suficientemente difícil para tiempo real en cada píxel. Por lo tanto, el uso de una astucia oídos finta. La señal resultante es tomada en 4 píxeles adyacentes con un desplazamiento de fase 90⁰ y se correlacionó con sí mismo:

A continuación, el desplazamiento de fase se define como:

Conociendo el desplazamiento de fase resultante y la velocidad de la luz para obtener la distancia del objeto:

Estas cámaras son un poco más simple que las que se basan en la tecnología de primera, pero aún complejo y costoso. Aquí esta empresa Hace. Y son del orden de 4килобаксов. Pero simpatishnye y futurista:

La tercera tecnología - & quot; Rango de imágenes & quot cerradas;. Esencialmente deslizar la cámara. La idea aquí es simple y al horror no requiere receptores de alta precisión o correlación compleja. Antes de matriz vale la pena el obturador. Supongamos que tenemos que es perfecto y funciona al instante. En el tiempo 0, la escena de iluminación. El obturador está cerrado en el tiempo t. Entonces, los objetos que se encuentran más lejos de lo que t / (2 ∙ c), donde c - velocidad de la luz no será visible. Luz simplemente no tiene tiempo para volar con ellos y volver. Punto situado cerca de la cámara será cubierto en todo momento y tener la exposición t brillo I. Por lo tanto, cualquier punto de la exposición será el brillo de 0 a I, y esto es una representación de la luminosidad de la distancia al punto. El más brillante - cuanto más cerca
. Ha terminado en sólo un par de pequeñas cosas: entrar en el modelo, mientras que el obturador se cierra y el comportamiento de la matriz en el evento, no idealidad de la fuente de luz (por una fuente puntual de luz y la dependencia de brillo de rango no es lineal), diferente reflectividad de los materiales. Esta es una tarea muy grande y complejo, que los autores han decidido dispositivos.
Tales cámaras son los más inexacta, pero el más simple y barato: la complejidad del algoritmo en ellos. ¿Quieres un ejemplo se ve como esta cámara? Aquí está:

Sí, en la segunda pena Kinect sólo una cámara como esta. Eso sí, no confundir el segundo con el primer Kinect (Habre érase una vez un artículo bueno y detallada donde todo se mezcla para arriba). En el primer Kinect utiliza iluminación estructurada . Aquí es donde la tecnología más antigua, menos fiables y más lento:


Antes había cámara infrarroja convencional, lo que se ve en el patrón proyectado. Sus distorsiones determinan el rango (comparación de métodos se puede encontrar aquí тут).
Pero Kinect no es el único representante del mercado. Por ejemplo Intel lanza cámara por $ 150, lo que da la imagen del mapa en 3D. Se centra en una zona cercana, pero tienen un SDK para el análisis de los gestos en el marco. Aquí hay otra вариант de Softkinetic (ellos también tienen el SDK, además de que son de alguna manera ligada a los instrumentos de Texas).



Yo mismo, aunque todavía no enfrenté con cualquiera de estas cámaras, lo cual es una pena y una vergüenza. Pero creo y espero que en cinco años van a entrar en la vida cotidiana y mi turno vendrán. Por lo que yo sé, se utilizan activamente en la orientación de los robots, la introducción de un sistema de reconocimiento por parte de los individuos. Gama de tareas y aplicaciones es muy amplia.
Fuente: habrahabr.ru/post/224605/




















Panorámica HD-cámara Giroptic: disparar bajo el agua, se atornilla en el zócalo de la bombilla, la corriente a través de Ethernet y Wi-Fi
Autofoco láser en su teléfono inteligente LG reorganizado con una aspiradora