1694
飞行时间
你知道,我不知道舆论有时离奇结构。就拿技术的3D可视化。巨大的舆论哗然造成近期虚拟现实眼镜技术: Oculus公司裂谷,Google玻璃的。但有没有什么新的在这里,第一个虚拟现实头盔出现在90年代末。是的,他们是困难的,他们超前了,但后来为什么没有造成这样的WOW效果?或三维打印机。文章大约一个星期它们是如何凉或有多快,他们接管世界出现在信息领域的两倍,过去三年。我不认为,它的清凉世界,他们仍然捕捉。但是,这种技术被创造早在上世纪80年代,从那时起缓慢进展。 3D电视? 1915年...
所有这些技术都不错,好奇,但多少炒作,因为每一个打喷嚏?
如果我说,在过去的10年被发明,开发并引入了3D拍摄的大量生产技术是非常不同的其他任何?在该技术中已广泛使用。建立良好的和可访问到普通百姓的商店。你听说过吗? (大概在机器人的唯一专家和科学相关领域已经猜到了,我说的是TOF-摄像头)。

什么是飞行时间相机?在俄罗斯维基百科(英语),你不会找到,甚至一提他短暂的,它是。 «飞行时间相机»翻译为“Vremyaprolёtnaya摄像头。”相机确定由光速的距离通过测量由照相机所发出的光信号的飞行时间,以及每个点的图像的反射。目前的标准是320×240像素矩阵(下一代将是640 * 480)。相机提供的约1英寸的深度的精确测量。是。矩阵的76800传感器确保的1/10,000,000,000(10 ^ -10)的第二量级的时间精确测量。发售。 150块钱。你甚至可以使用它。
现在有点担心物理,经营方针,在那里你遇到了这种美。
主要有三种类型的TOF-相机。对于每个类型的使用其技术范围内的测量点的位置。最简单而明确 - «脉冲调制»又名“正向飞行时间的成像»。带动并在每个点矩阵测量他回来的确切时间:
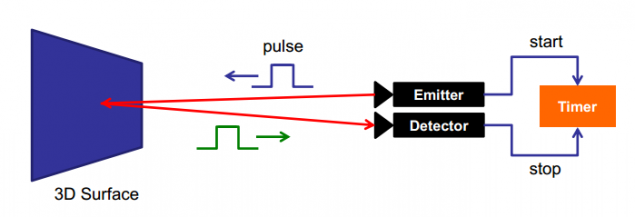
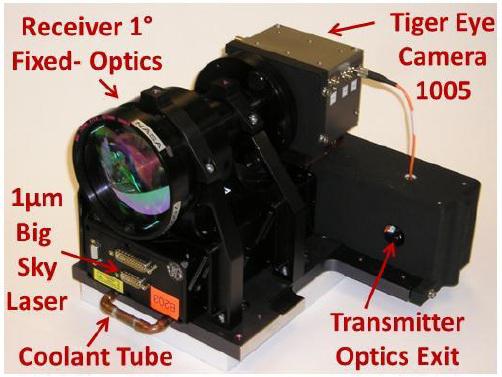
事实上基质由火上波前触发器。同样的方法被用于一个同步光闪烁。这里只对精度的订单。这是该方法的主要和复杂性。需要非常精确的检测器的响应时间,这需要特定的技术解决方案(无 - 我找不到)。现在,美国宇航局正在这些传感器检测到的登陆器<一href="http://ntrs.nasa.gov/archive/nasa/casi.ntrs.nasa.gov/20130013472.pdf">кораблей.
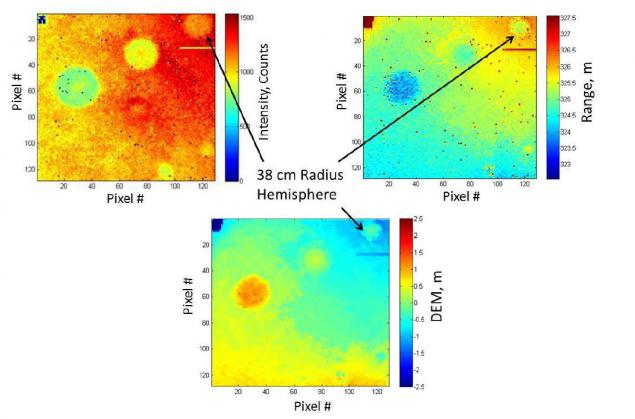
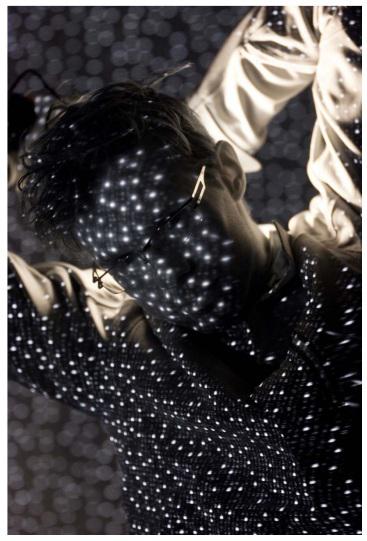
但画面,它产生:
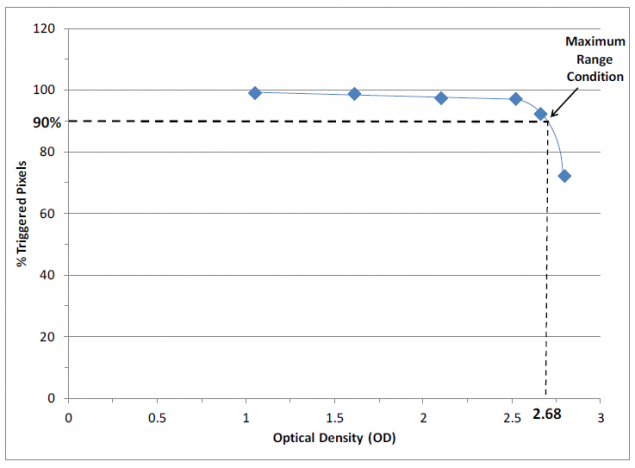
背光他们足以引发光流从大约1公里的距离反映了火灾。图中示出了根据90%工作时为1km的距离的距离触发的像素矩阵中的数如下:
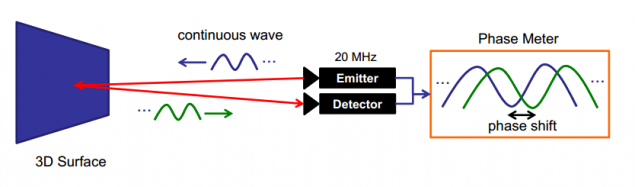
第二种方法 - 恒定的调制信号。该发射器发出一定的调制波。接收器是他看到与这波什么的最大相关性。这决定了在其上的信号花费反映和来向接收器的时间。
让发出的信号:
其中w - 调制频率。然后,接收到的信号看起来像如下:

其中b-移位,一个振幅。输入和输出信号的相关性如下:

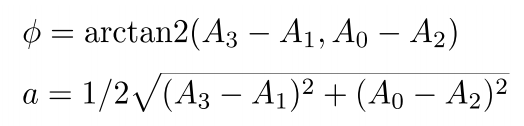
但随着时间的所有可能位移的相关性充分,使难以够实时地在每一个象素。因此,使用一个狡猾的佯攻的耳朵。所得到的信号被取入4个相邻的像素的移位90⁰相位和相关性与自身如下:

然后相移被定义为如下:
知道所得到的相移和光的速度,以获得物体的距离如下:
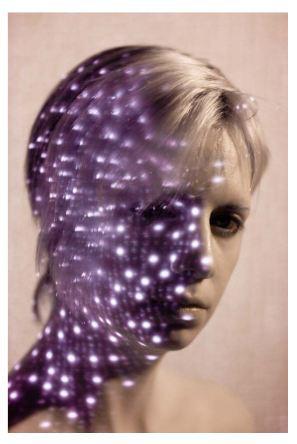
这些摄像机是比建立在第一个技术更为简单了一点,但仍然复杂和昂贵。让他们在这里公司。和他们的<一个量级的href="http://www.robotshop.com/en/catalogsearch/result/?q=MESA&order=stats_sales_order_count&dir=desc">4килобаксов.但simpatishnye和未来:

第三个技术 - &QUOT;距离选通成像与QUOT;本质上滑动室。这里的想法是简单,恐怖不需要高精度接收机或复杂的相关性。矩阵值得快门前。假设我们把它完美的作品瞬间。在时间0时,照明场景。当快门关闭时间t。然后,这是远于吨/(2∙c)中,其中c对象 - 速度的光将不可见。光只是没有时间飞到他们回来。点位于靠近相机将被覆盖在任何时候,具有曝光吨亮度I.因此,任何点的展览将是从0的亮度为I,而这是对点之间的距离的亮度的表示。亮 - 越接近
。 你在短短的几个小事情做好:进入模式,同时在快门关闭,矩阵,在该事件中的行为,非理想光源(光及亮度范围依赖的点源不是线性的),不同反射率的材料。这是一个非常大的和复杂的工作,其中作者已决定装置。
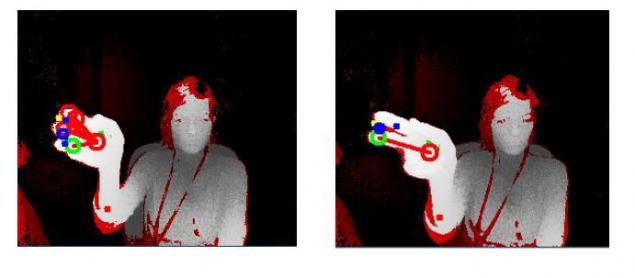
这种照相机是最不准确的,但最简单和便宜的:在该算法中它们的复杂性。想要一个例子是这样的相机?在这里,它是:

是的,在第二Kinect的价值就是这样的相机。只是不要混淆与Kinect的第一,第二(哈布雷从前有一个很好的和详细的文章 的一切是混淆了)。在第一个Kinect的使用结构照明。这是上了年纪,较不可靠的和更慢的技术方法:
目前使用的传统红外摄像机,它看起来在投影的图案。他扭曲确定的范围内(方法比较,可以在这里<一个发现href="http://www.ti.com/ww/en/analog/3dtof/index.shtml?DCMP=hpa_contributed_article&HQS=3dtof-ca">тут).
但Kinect是不是市场的唯一代表。例如英特尔发布 的摄像头为150美元,这给3D地图图像。它的重点是近区,但他们有一个SDK的手势在框架的分析。这里是另一个<一href="http://www.softkinetic.com/Store/tabid/579/ProductID/6/language/en-US/Default.aspx">вариант 从SoftKinetic(他们也有SDK,再加上他们在某种程度上依赖于德州仪器)。


我自己虽然还没有面临任何一个摄像头,这是一个遗憾和羞愧。但我认为,希望在五年内,他们将进入到日常的生活,使我会来的。据我所知,他们正在积极地用在机器人的方向,由个人提出表彰制度。任务和应用的范围很广。
资料来源: habrahabr.ru/post/224605/
所有这些技术都不错,好奇,但多少炒作,因为每一个打喷嚏?
如果我说,在过去的10年被发明,开发并引入了3D拍摄的大量生产技术是非常不同的其他任何?在该技术中已广泛使用。建立良好的和可访问到普通百姓的商店。你听说过吗? (大概在机器人的唯一专家和科学相关领域已经猜到了,我说的是TOF-摄像头)。

什么是飞行时间相机?在俄罗斯维基百科(英语),你不会找到,甚至一提他短暂的,它是。 «飞行时间相机»翻译为“Vremyaprolёtnaya摄像头。”相机确定由光速的距离通过测量由照相机所发出的光信号的飞行时间,以及每个点的图像的反射。目前的标准是320×240像素矩阵(下一代将是640 * 480)。相机提供的约1英寸的深度的精确测量。是。矩阵的76800传感器确保的1/10,000,000,000(10 ^ -10)的第二量级的时间精确测量。发售。 150块钱。你甚至可以使用它。
现在有点担心物理,经营方针,在那里你遇到了这种美。
主要有三种类型的TOF-相机。对于每个类型的使用其技术范围内的测量点的位置。最简单而明确 - «脉冲调制»又名“正向飞行时间的成像»。带动并在每个点矩阵测量他回来的确切时间:

事实上基质由火上波前触发器。同样的方法被用于一个同步光闪烁。这里只对精度的订单。这是该方法的主要和复杂性。需要非常精确的检测器的响应时间,这需要特定的技术解决方案(无 - 我找不到)。现在,美国宇航局正在这些传感器检测到的登陆器<一href="http://ntrs.nasa.gov/archive/nasa/casi.ntrs.nasa.gov/20130013472.pdf">кораблей.

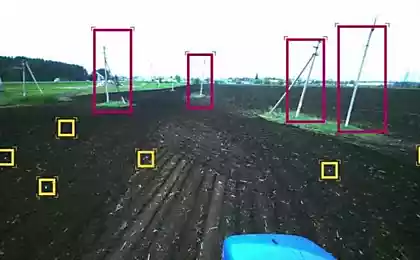
但画面,它产生:

背光他们足以引发光流从大约1公里的距离反映了火灾。图中示出了根据90%工作时为1km的距离的距离触发的像素矩阵中的数如下:

第二种方法 - 恒定的调制信号。该发射器发出一定的调制波。接收器是他看到与这波什么的最大相关性。这决定了在其上的信号花费反映和来向接收器的时间。

让发出的信号:

其中w - 调制频率。然后,接收到的信号看起来像如下:

其中b-移位,一个振幅。输入和输出信号的相关性如下:


但随着时间的所有可能位移的相关性充分,使难以够实时地在每一个象素。因此,使用一个狡猾的佯攻的耳朵。所得到的信号被取入4个相邻的像素的移位90⁰相位和相关性与自身如下:

然后相移被定义为如下:

知道所得到的相移和光的速度,以获得物体的距离如下:

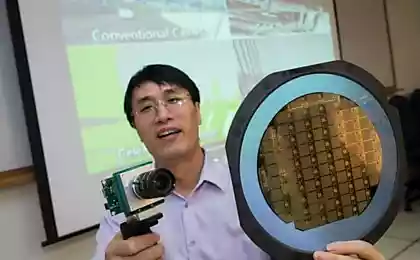
这些摄像机是比建立在第一个技术更为简单了一点,但仍然复杂和昂贵。让他们在这里公司。和他们的<一个量级的href="http://www.robotshop.com/en/catalogsearch/result/?q=MESA&order=stats_sales_order_count&dir=desc">4килобаксов.但simpatishnye和未来:

第三个技术 - &QUOT;距离选通成像与QUOT;本质上滑动室。这里的想法是简单,恐怖不需要高精度接收机或复杂的相关性。矩阵值得快门前。假设我们把它完美的作品瞬间。在时间0时,照明场景。当快门关闭时间t。然后,这是远于吨/(2∙c)中,其中c对象 - 速度的光将不可见。光只是没有时间飞到他们回来。点位于靠近相机将被覆盖在任何时候,具有曝光吨亮度I.因此,任何点的展览将是从0的亮度为I,而这是对点之间的距离的亮度的表示。亮 - 越接近
。 你在短短的几个小事情做好:进入模式,同时在快门关闭,矩阵,在该事件中的行为,非理想光源(光及亮度范围依赖的点源不是线性的),不同反射率的材料。这是一个非常大的和复杂的工作,其中作者已决定装置。
这种照相机是最不准确的,但最简单和便宜的:在该算法中它们的复杂性。想要一个例子是这样的相机?在这里,它是:

是的,在第二Kinect的价值就是这样的相机。只是不要混淆与Kinect的第一,第二(哈布雷从前有一个很好的和详细的文章 的一切是混淆了)。在第一个Kinect的使用结构照明。这是上了年纪,较不可靠的和更慢的技术方法:


目前使用的传统红外摄像机,它看起来在投影的图案。他扭曲确定的范围内(方法比较,可以在这里<一个发现href="http://www.ti.com/ww/en/analog/3dtof/index.shtml?DCMP=hpa_contributed_article&HQS=3dtof-ca">тут).
但Kinect是不是市场的唯一代表。例如英特尔发布 的摄像头为150美元,这给3D地图图像。它的重点是近区,但他们有一个SDK的手势在框架的分析。这里是另一个<一href="http://www.softkinetic.com/Store/tabid/579/ProductID/6/language/en-US/Default.aspx">вариант 从SoftKinetic(他们也有SDK,再加上他们在某种程度上依赖于德州仪器)。



我自己虽然还没有面临任何一个摄像头,这是一个遗憾和羞愧。但我认为,希望在五年内,他们将进入到日常的生活,使我会来的。据我所知,他们正在积极地用在机器人的方向,由个人提出表彰制度。任务和应用的范围很广。
资料来源: habrahabr.ru/post/224605/