959
控制机器人只用一个马达
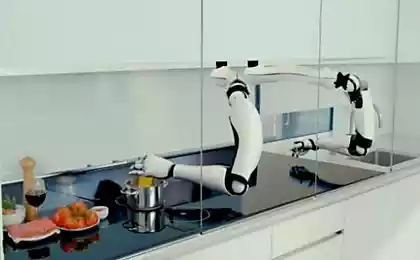
图为六腿短的小无线电控制的机器人。他能跑得不够快,在地板上,而不是跑,而是爬像甲虫。机器人名为1STAR,代表“1致动器可操纵机器人»(单控机器人)。这小子谁也不能随便动的设计特点,但左右转动,只有一个运动的存在。看来,好,那,因为他也是有车。但乘坐的汽车轮子上,在这里,我们都在谈论的抓取 B>。
除了电动机1STAR不可逆的,旋转在一个方向上。并且如果来自发动机的扭矩被传递到用齿轮齿轮的腿,所述转动是通过使用灵活而有弹性,中间腿进行。
如可以看到在视频仅仅是一个弹性的中间一对腿,一对前部和后部的是由硬质材料。第二特技是使用一个准确的设计和给药加速马达的旋转。在任何给定时间,只有三个表面碰腿式机器人,δ-:正面和背面,用一只手,用其它介质。在电动机和柔性弹性腿微曲平均和稍微落后的刚性腿在相反侧的运动的旋转急剧加速的时间。至于平均表面足,另一方面,所述马达的旋转速度变慢。所以小机器人绕“第一”中间站期间,倒是短暂加速电动机的旋转。相同的原理被转动履带式车辆,轨道和轿厢减速在这个方向上旋转的一个的旋转速度。如果发动机速度不发生变化,则所述柔性中间腿在节奏与前部和后部,并且机器人直线移动。电机离散切换的加速和减速非常快,人们甚至不会注意到它。但它足以使机器人很快绕过障碍物。
当然,这种设计不允许创建高度可动机器人,其可靠性不太高,考虑到大量的运动部件,包括柔性的。但肯定很难拿出一些简单和更便宜,而无需使用轮式底盘。此外,几乎整个结构可以很容易地印上三维打印机,并且只使用一个马达的显着降低了整体成本,尤其是如果它是必要的,以使大量的这种机器人的。说,评估影响和受人为和自然灾害。
1STAR Zarrouk从本古里安大学开发的David(大卫Zarrouk)和罗纳德恐惧(罗纳德S.恐惧)从大学伯克利分校。
资料来源: geektimes.ru/post/240750/