1651
Lo que no habíamos mostrado "Mars-3"?
Hoy - 42 años desde el primer aterrizaje exitoso en la nave espacial a Marte desde la Tierra - "Marte-3". Se sabe es que él se sentó con éxito debido a las emisiones de radio empezaron - que comenzó a emitirse la primera foto panorámica de la superficie. Las antenas pueden ser reveladas sólo en el caso de primarseniya éxito.
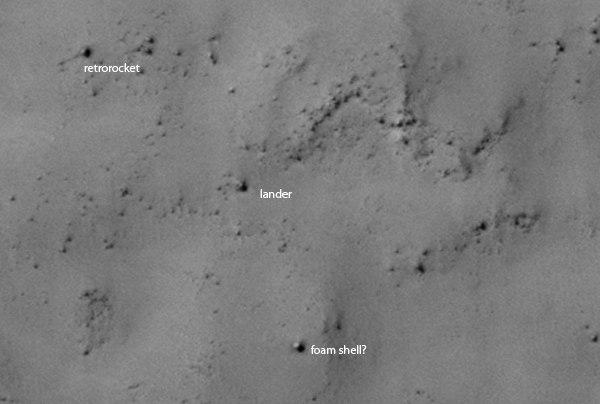
Como usted probablemente sabe, este año de nuevo recordó que cuando se supo que Zelenyikot suscriptores y su grupo Vkontakte < a href = "https://vk.com/curiosity_live"> «Curiosidad - el rover» encontró "Mars-3" en Marte
. Pocos días después del descubrimiento del "Marte-3", sentí horror como preguntándose qué tipo y no se transmite a la Tierra la unidad. En el momento en que tuve una experiencia de creación de objetos volumétricos en imágenes Blender 3D basado en la curiosidad y apegado a ella mapas de altura. Así que pensé - "Y si hago lo mismo pero con un modelo del aterrizaje" Mars-3 "mediante la colocación de la cámara en nombre de la unidad?".
En teoría, es simple. Tuvimos que tomar los datos de la sonda Mars Reconnaissance Orbiter de satélite, en el que expertos de la NASA han creado superficie anaglifo. Buscar en Google, no he encontrado una manera de convertir anaglifo en el mapa de altura.
Bajo Curiosidad publicado una convocatoria de ayuda. Encontró la respuesta para eso, le expreso mi profundo agradecimiento a Daniel Tolkachov , quien respondió e hizo un mapa de altura basado en datos de satélite.
He aquí su descripción del proceso:
«Herramientas: Python + OpenCV. El algoritmo escrito por él mismo, aunque estándar:
Rasgos característicos 1. Las imágenes se buscan (SIFT algoritmo)
2. Producido comparación de punto dispone de las dos imágenes. El resultado es una matriz que une el punto de una imagen y la otra línea (matriz fundamental)
3. Sobre la base de la matriz fundamental alinear la imagen así obtenido, que uno y el mismo objeto en las dos imágenes se encuentra en la horizontal. Anaglifo se basa en imágenes rectificadas. Stereosopostavlenie en lo sucesivo también hizo sobre la base de estos mismos
4. Usando el algoritmo Stereo semiglobal Matching se realiza la construcción de mapas de disparidad. Hay algunas sutilezas de la configuración del algoritmo y el procesamiento de imágenes de gran tamaño.
Cabe señalar que el método utilizado para construir el mapa de altura no produce valores absolutos y en general - puede haber algo de distorsión asociada con la formación de imágenes por satélite característica » I>
.
(Parece Habré no lo es, pero si el proceso es interesante, tratar de invitarlo para una descripción detallada).
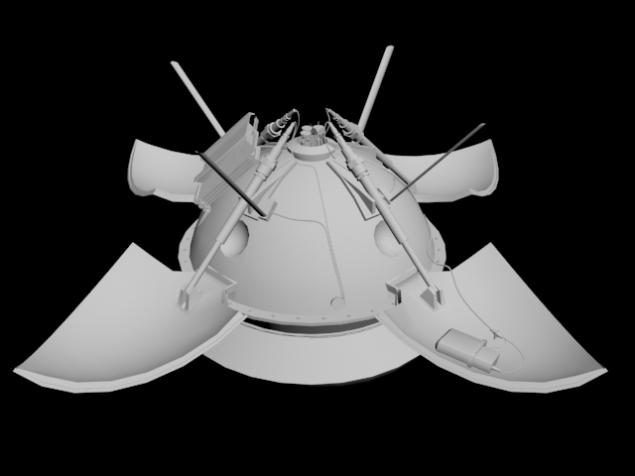
En la época de grupo "marsohodnoy" tenía competencia para crear modelo 3D de" Mars-3 », y se puede añadir al panorama.
Siguiente truco. En resumen: me corté un pedazo cuadrado de la parte deseada de la imagen para la textura y el mismo en el mapa de altura. En Blender 3D crea una superficie, lo puso en un mapa de altura, proporcionalidad ligeramente corregida, aplicar una textura, configurar el sol, el color del cielo, la atmósfera y poner el modelo del dispositivo en su lugar en la imagen satelital (que es la textura).
Aquí en la proporcionalidad nos gustaría discutir con más detalle. Cualquier persona normal le pregunta: "¿Y dónde está la garantía de que este punto de vista de la imagen corresponde más o menos a la realidad?". Es muy simple. En primer lugar, la tarjeta se basa en datos de satélite. En segundo lugar, hay una cosa muy interesante - los objetos en el programa se escalan proporcionalmente. Cada lado de la modelo se aumenta al mismo número de veces. Por lo tanto, se extiende el modelo justo por debajo del diámetro del dispositivo en las fotos de satélite, automáticamente hacemos su prorrata con todo el paisaje.
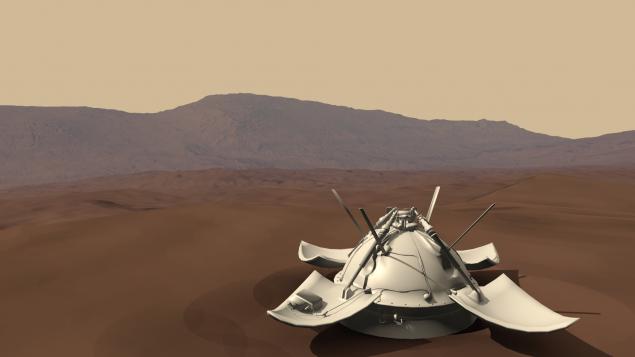
Al final, resultó que:
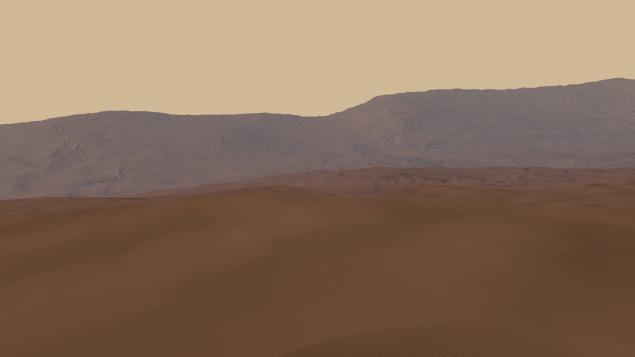
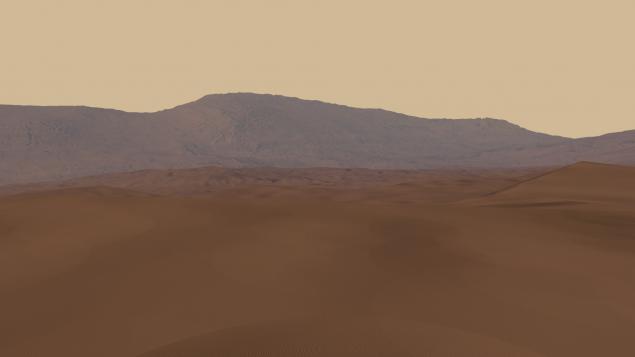
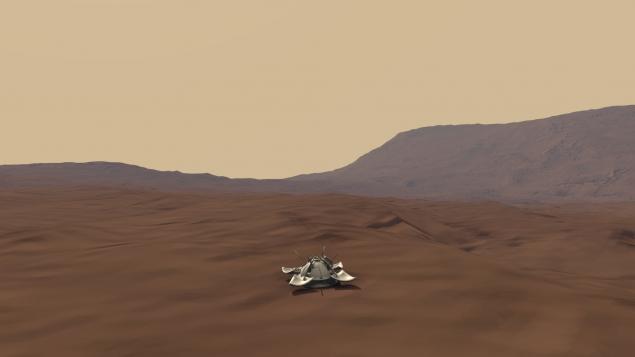
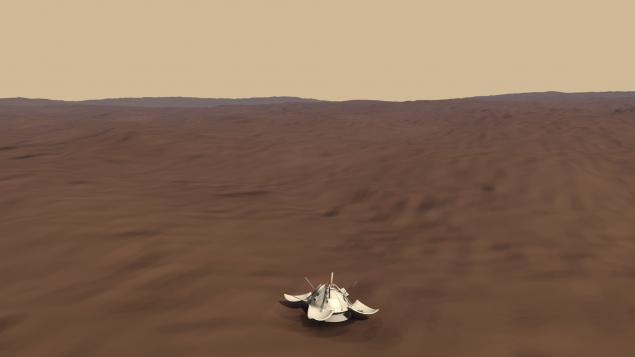
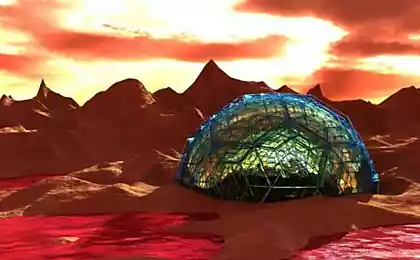
Aquí están las imágenes que se obtuvieron mediante la colocación de la cámara, en nombre de las cámaras de la "Mars-3" (longitud y altura de la imagen coincide con el tamaño de la unidad de la cámara):
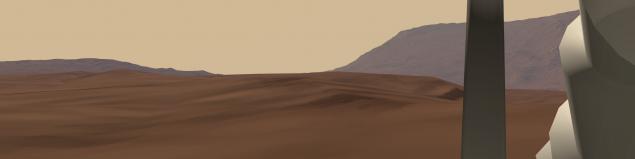
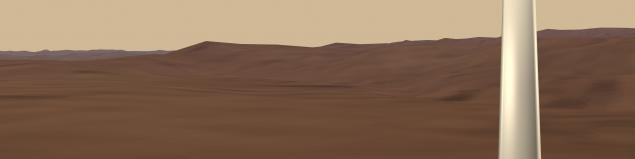

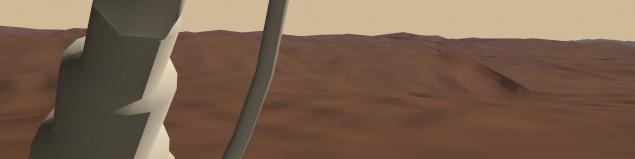
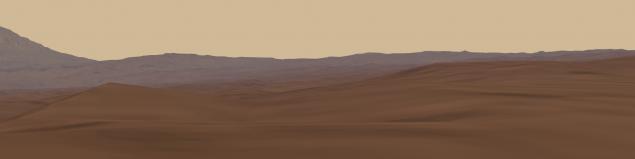
En las fotos de la parte más notable son las montañas en el fondo - un cráter eje 18 kilómetros Reutov, que fue llamada así en agosto 2013 año.
Enfatizo - que no pretenden gipertochnost, pero estoy seguro de 60% corresponde a lo que hemos visto, si la unidad aún se transfiere imágenes de la superficie (y la calidad de sus cámaras excedería lo que se encontró allí en 70 es).
Por desgracia, no tenemos modelos en 3D de los frenos del motor, la cadena ligada a la parte inferior del recipiente toroidal, y no existe un modelo de la caja de la espuma, que defendió la sonda en el momento del impacto con la superficie. Por lo tanto, no podemos establecer un cuadro completo de la plataforma de aterrizaje. Dibujos tanto, incluso un modelo de la "Mars-3" creado "a ojo", basado en las fotos.
Como puede verse, la simulación no es piedras superficiales suficientes, todo tipo de pequeños detalles que se pueden ver en la imagen del satélite. Por lo tanto, si hay algunos entre habrayuzerov personas que pueden decirle cómo hacerlo de manera competente, o hágalo usted mismo - Yo seré muy feliz, y dispuesto a ayudar.
Fuente: habrahabr.ru/post/204562/