Жизнь — интересная!
Подписывайтесь на нашу группу в Telegram и Facebook, чтобы быть в сообществе единомышленников, находить вдохновение и не пропускать свежие и удивительные статьи с bashny.net.
688
0.2
2015-06-08
Google опубликовала майский отчёт по тестированию робомобилей
На сайте Google Self-Driving Car project появился небольшой PDF-отчёт от команды инженеров, занятых на проекте роботизированных автомобилей. Судя по всему, такие документы будут публиковаться ежемесячно. Несмотря на то, что текущий отчёт содержит всего несколько страниц, в нём подробно описываются дорожные инциденты, в которые за прошедшие шесть лет с начала тестирования успели попасть робомобили поискового гиганта.
Прежде всего Google уточняет цифры: в программе принимают участие 23 автомобиля Lexus RX450h SUV, которые передвигаются по дорогам Калифорнии, главным образом в Маунтин-Вью. Кроме них на закрытых полигонах находятся ещё 9 прототипов. С 2009 года робомобили успели проехать 1 627 591 километр в роботизированном режиме (под ним подразумевается, что управление осуществляет только программное обеспечение, а находящийся в салоне авто водитель руля не касается). В среднем за неделю робокары проезжали по 16 000 км по открытым дорогам.
За шесть лет произошло 12 аварий с участием робомобилей, причём все они произошли по вине людей. Ближайшая по времени майская авария произошла с Lexus, когда тот остановился на красный свет на перекрёстке в Маунтин-Вью. В этой время какой-то автомобиль, управляемый человеком, помял задний бампер Lexus и повредил таким образом сенсоры на нём. Скорость движения виновника в этот момент составляла всего около 1.5 км/ч, так что ДТП закончилось без серьёзных повреждений.
Любопытно оценить сложные дорожные ситуации с которыми встречались робокары и как они сумели выйти из них:
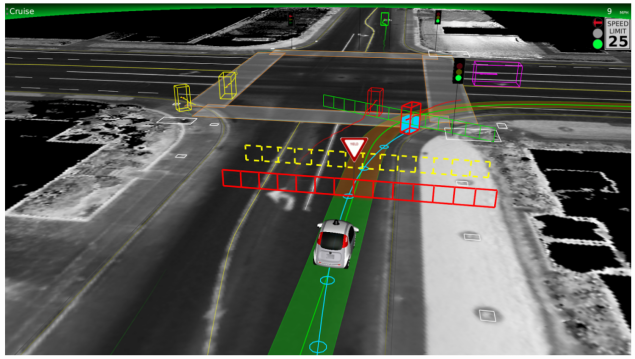
На схеме выше показан план движения робокара на перекрёстке и двух мотоциклистов, которые обозначены красными параллелепипедами (ломаная красная линия — это путь их движения). Робокар остановился на перекрёстке, в это время левый по отношению к нему мотоциклист сравнительно удачно миновал перекрёсток и поехал дальше. Зато мотоцикл, поворачивающий справа навстречу робокару, по неизвестной причине выехал на встречку так, что оказался прямо на пути движения гугломобиля — его вычисленная траектория движения показана голубой линией. Программное обеспечение авто приняло решение остановиться и не ехать навстречу, давая возможность мотоциклу избежать столкновения прямо у перекрёстка. В итоге робокар и мотоцикл благополучно разминулись, избежав неприятностей при аварии. Дополнительная трудность заключалась в том, что всё происходило в тёмное время суток, и водителю-человеку было бы затруднительно дать верную оценку ситуации.
Источник: geektimes.ru/post/251638/
Прежде всего Google уточняет цифры: в программе принимают участие 23 автомобиля Lexus RX450h SUV, которые передвигаются по дорогам Калифорнии, главным образом в Маунтин-Вью. Кроме них на закрытых полигонах находятся ещё 9 прототипов. С 2009 года робомобили успели проехать 1 627 591 километр в роботизированном режиме (под ним подразумевается, что управление осуществляет только программное обеспечение, а находящийся в салоне авто водитель руля не касается). В среднем за неделю робокары проезжали по 16 000 км по открытым дорогам.
За шесть лет произошло 12 аварий с участием робомобилей, причём все они произошли по вине людей. Ближайшая по времени майская авария произошла с Lexus, когда тот остановился на красный свет на перекрёстке в Маунтин-Вью. В этой время какой-то автомобиль, управляемый человеком, помял задний бампер Lexus и повредил таким образом сенсоры на нём. Скорость движения виновника в этот момент составляла всего около 1.5 км/ч, так что ДТП закончилось без серьёзных повреждений.
Любопытно оценить сложные дорожные ситуации с которыми встречались робокары и как они сумели выйти из них:

На схеме выше показан план движения робокара на перекрёстке и двух мотоциклистов, которые обозначены красными параллелепипедами (ломаная красная линия — это путь их движения). Робокар остановился на перекрёстке, в это время левый по отношению к нему мотоциклист сравнительно удачно миновал перекрёсток и поехал дальше. Зато мотоцикл, поворачивающий справа навстречу робокару, по неизвестной причине выехал на встречку так, что оказался прямо на пути движения гугломобиля — его вычисленная траектория движения показана голубой линией. Программное обеспечение авто приняло решение остановиться и не ехать навстречу, давая возможность мотоциклу избежать столкновения прямо у перекрёстка. В итоге робокар и мотоцикл благополучно разминулись, избежав неприятностей при аварии. Дополнительная трудность заключалась в том, что всё происходило в тёмное время суток, и водителю-человеку было бы затруднительно дать верную оценку ситуации.
Источник: geektimes.ru/post/251638/
Портал БАШНЯ. Копирование, Перепечатка возможна при указании активной ссылки на данную страницу.