1565
从上车的GPS轨道客车不同

<燮>照片阿尔乔姆Svetlov SUP>
构建href="http://maps.mail.ru">地图Mail.Ru 的处理GPS的轨道运动的上大量的信息的镜像项目
这是为什么vazhnoMarshrutnye车辆经常不动,在该流的其余部分的速度。当然,他们可以是运输状况的指标,但也有一些细节:
- 在公共汽车和无轨电车往往有自己的时间表,用大量沿途停靠。这意味着在开放之路的公交车会明显慢流,往往停留的时间很短。上下班高峰期,当公交车每7-10分钟,就可以发送足够的信息,以减少靠近车站的流速。
- 由于专用车道,公交车可以走得更快的交通流量。 LI>
- 的小巴司机经常去违反所有规则。 LI> UL>我们想描述的电车,这几乎都是乘坐专用车道,路过附近或在街道与汽车交通的中心。因此,有轨电车的轨道几乎没有区别,从轨道车上。
初始dannyeZaranee说,该制品的目的,并不是要比较哪些卫星导航系统的更好。几乎所有客户端设备接收数据,从所有可用的系统,并产生广义坐标,现在成本的芯片。为了节省空间,在这里和在未来将调用轨道,通过使用卫星导航系统,全球定位系统的轨道产生的。
首先,让我们来定义什么是GPS的轨道。全球卫星定位系统的轨道 - 该装置的随时间推移的坐标位置的序列。不幸的是,我们知道有关每个轨道的唯一事情,请发送设备 - 它是一个唯一的标识号。这些都是保密的严格要求。
所有曲目有不同的性质,来自不同的供应商。在这篇文章中,我会考虑在设备刚性地固定到所述车辆和发送数据以一定的时间间隔的情况。这种简化可以让我不要考虑在该设备中记录的轨迹在别人手中的局面,那么,有人上车了,骑在上面几站。
分析的目的是那些总曲目列表的配置谁最沿街的相同顺序的时候招 - 路线
方法resheniyaPervym外遇原来连续的轨道应该分为单车次,我们将相互比较。如前所述 - 对物理机站的GPS跟踪器每隔几秒钟发送你的坐标。大多数情况下,跟踪器的工作原理,当汽车点火开关上,但也有周围的时钟进行操作的设备。因此分离旅行花费的时间,其中的速度始终为0或设备不发送数据更长的时间。
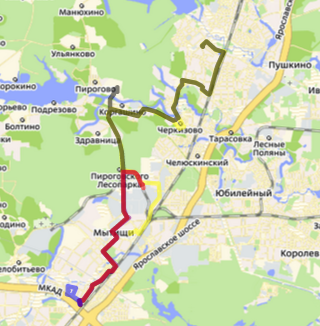
<燮>的轨道上了一趟 SUP>
分离的例子
现在对每个车辆我们有一组轨道,旅行,他一直致力于用于在一定的时间周期。其中包括引起确定坐标误差真实旅行者和malosvyazannye轨道,企业,“pereparkovkami”等类似的浪费禁区内的位移。为了不浪费计算资源,我过滤的不到400米的所有曲目,点的数量小于10,并且小于200米的地理分布于轨道的边界矩形(边界框)。这样就避免了轨道,链轮,它们由于在GPS接收器的大的随机误差而形成。

<燮>特色曲目链轮 SUP>
下一个任务 - 轨道比较起来,并确定它们是否通过相同的途径进行测试。要做到这一点,首先我给所有GPS轨迹在一个单一的形式,它们绑到我们的路由图。工作privyazchika我写在我的最后一个职位 。自那时以来,它已经发生了一些变化,但基本原理是相同的。在privyazchika的出口我得到的轨道作为链对的(图中的标识边缘的方向(正向或反向))。在这个阶段,你可以过滤不降的道路上图的轨道。这可能是飞机/直升机集装箱海中的曲目,联合收割机。或只是从那里经过,我们有,不管是什么原因,没有路由图的地方已经过去了机。我注意到,有只过滤那些不符合路由图的轨道。如果汽车离开停车场时,在那里我们没有路由图,则长骑在公路,其中附连到路由图,我们停在停车场的端部的方式(其中,再没有路由图表),该轨迹将被计数。
所得的链更容易相互比较。我浏览过的各种指标的比较,最终停在<一href="http://ru.wikipedia.org/wiki/%D0%A0%D0%B0%D1%81%D1%81%D1%82%D0%BE%D1%8F%D0%BD%D0%B8%D0%B5_%D0%9B%D0%B5%D0%B2%D0%B5%D0%BD%D1%88%D1%82%D0%B5%D0%B9%D0%BD%D0%B0">метрике洛温斯坦的。字母在这种情况下,是该组的所有可能的对边方向的。所以我得到的机会,以数值上测定的磁迹的“相似性”作为编辑次数肋路线(添加/删除/替换的肋)与一个路由以到达另一条路线。
下一个步骤是值得分组的路径上的磁迹。这个问题的回答数据的聚类算法。因为我已经有轨道“相似性”的一维的度量,我参加了一个很简单的算法,数据的层次聚类:<一href="http://ru.wikipedia.org/wiki/%D0%98%D0%B5%D1%80%D0%B0%D1%80%D1%85%D0%B8%D1%87%D0%B5%D1%81%D0%BA%D0%B0%D1%8F_%D0%BA%D0%BB%D0%B0%D1%81%D1%82%D0%B5%D1%80%D0%B8%D0%B7%D0%B0%D1%86%D0%B8%D1%8F">дендрограмму.树是基于断裂及其分支,其由多个n条边的不同的最短Levenshtein距离构成。发生势在必行计算,最佳N等于16
最后,我得到了一组集群包含一个类似的路线。有了这些信息,就已经可以得出一个结论,对车辆是否沿预定路线行驶。我不得不使用不同氮素取决于路径的边数的概念,但它并没有给出改善搜索质量的增长,我决定保持一个固定的ñ。
原本以为,大多数车辆有2个行程(从端到端)在两个方向。但是,经验表明,有时途径可以是圆形的,或者由几个部分组成。
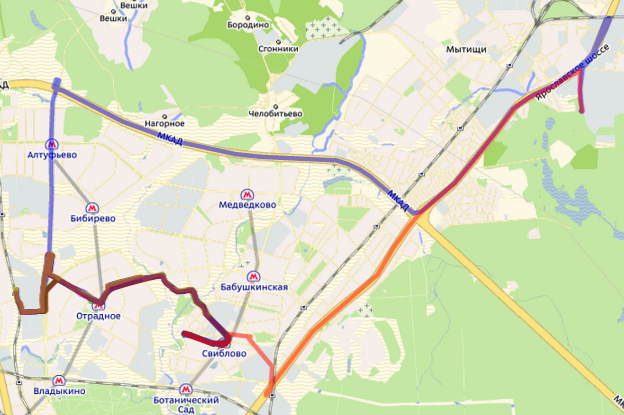
<燮>路线的车辆并不总是沿着路线移动。有前往车库加油等功能 sup>
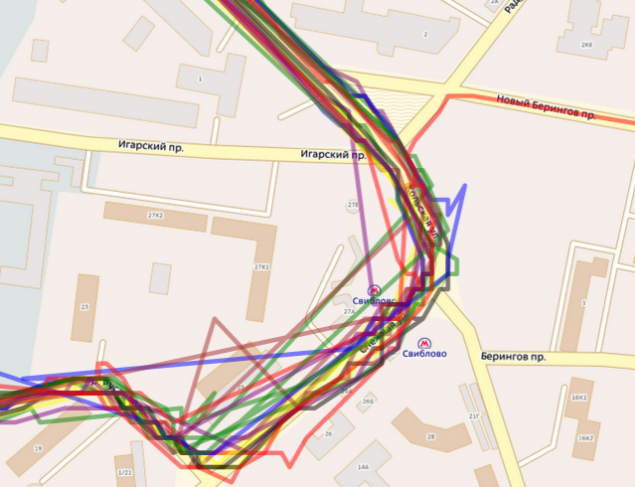
<燮>曲目的路线。特写图 SUP>
因此,大多数车辆具有至少一个簇,其中所述堆积跳闸和一些开销,一次性或更罕见的路由(车库加油前,等等)。基于这些结果,您可以检查另一个假设:一旦我们有车,路线指标的比较途径,我们可以分配在同一条路线营运车辆。要做到这一点,只需要不同的车辆的不同的簇,它们彼此(特别是簇的比较功能已在分层树的执行)进行比较。

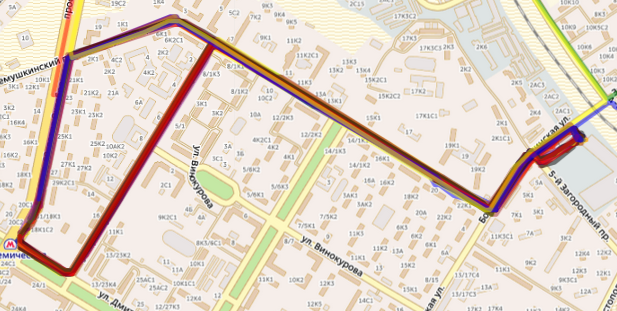
<燮>两种不同的旅游巴士在同一路线 SUP>
这样,我就可以在园区指定的路线和组车辆。
VyvodyAnonimnye GPS数据进行了大量的信息。正确地分析这些数据,我们可以从中了解如何生产的轨道车辆和有关城市和它的道路更大量的信息。因此,磁迹的范围不应该在获得关于交通堵塞的信息有限,并且信息本身也不仅有利于驾驶者,还市政及城市规划服务。此外,对于这些轨道的处理不一定知道创建它们的机器上的确切数据。所有关于车辆的必要信息可以告诉他的动作的统计数据。同时,全球定位系统的轨道 - 是不精确的工具的特定信息。为了得到结果,你必须检查大量的数据,这使高要求的生产基础设施。
资料来源: habrahabr.ru/company/mailru/blog/228289/