875
在国际空间站的周年
通过LJ用户chernovv社区photo_polygon
20 这就是站一年前:2007年6月19日查看国际空间站搭乘亚特兰蒂斯号航天飞机。

等等 - 在其历史上最开始。 1998年12月6日奋进号航天飞机送到单位«团结»(在前台)俄罗斯集团“黎明”(在云的距离的背景),国际空间站轨道的第一段运行。

1998年12月4日美国对接集团«团结»,送入轨道的航天飞机“奋进号»ç俄罗斯集团”黎明“与航天飞机手臂的帮助。在它的货舱大画幅相机安装IMAX,这使得这个画面。

叠“曙光”和«团结»自由飞行12月4日,从1998年的航天飞机“奋进号”的观点。

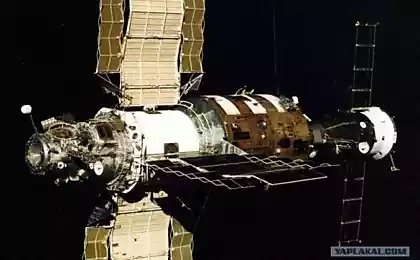
国际空间站上的10月11日2000在未来的日子里的图片,该站配置发生变化。目前站由块(从左至右)«团结»,«之星“,”黎明“的货轮”进步“。块Z1桁架和第三对接端口
预计完成

查看该站2005年8月6日
的

站式“联盟号14(TMA 10),”4月9日走在码头,2007年

国际空间站与航天飞机“发现号”普遍认为6月11日2008年(NASA)

2月16日,2001年查看亚特兰蒂斯号航天飞机从国际空间站。

运输船联盟号14(TMA-10)

第12远征ISS发布了一个免费的飞行轨道上的卫星西装,叫SuitSat - 不必要的俄罗斯宇航服ORLAN,装有电池和一个无线电发射机,广播录音票学生提供一个消息给世界各地的业余无线电操作员。宇航服进入大气层并烧毁了几个星期后。

宇航员卡伦·尼伯格,留意近日停靠在国际空间站对接基博实验室发现号航天飞机于6月10日,2008年(NASA)的窗口

远征-3(白衫),STS-105(ekspditsiya访问,条纹衬衫),以及探险-2(红衫)的一组照片中的国际空间站的命运实验室8月17日,2001年(NASA)

亚特兰蒂斯与国际空间站2月9日之前的对接,2008年武装与400和800 mm镜头摄影器材,在空间站度过了拍摄航天飞机的热屏蔽板,并把他们安全的任务控制分析。

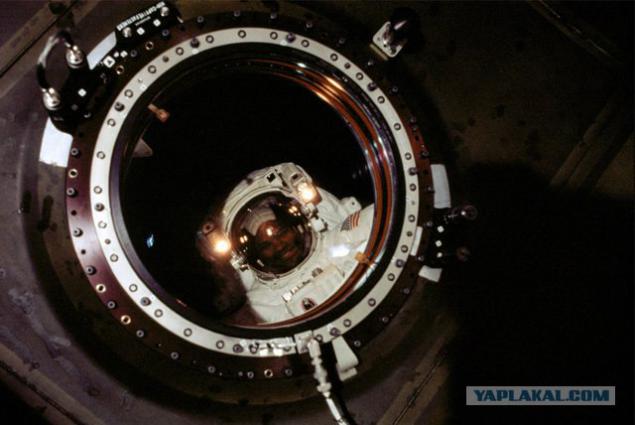
宇航员谢尔盖·克里卡列夫和他的相机。

宇航员罗伯特·柯宾拍下远征1的成员在新成立的命运实验室的三次太空行走2月12日,2001年以前,这个词宇航员连接坞口和实验室之间的几台电脑和电缆第二期间(NASA)
“幻影躯干”关于2001年5月13日,在实验室的命运在国际空间站(ISS)。它被设计用于测量辐射对器官在人体内的效果。躯干相当于平均成年男性的高度,密度和重量。它包括一个实时记录作为放射线产生脑,甲状腺,心脏,肺区域,依此类推。D的数据将被用于确定身体如何保护他们的辐射的内部器官的放射线传感器。这些信息将是一个长期的太空飞行非常重要。 (NASA)

8月11日,2007年的移动服务系统MSS(移动服务系统)的主要内容之一的中心 - 空间站机械手远程SSRMS(空间站的遥控器系统)。操盘站的设计和加拿大公司MD机器人,该公司麦当劳,Dettwiler和联合有限公司的一个部门制造根据合同的加拿大航天局(CSA *)。 MD机器人(安大略省布兰普敦),原名晶石空间系统,是晶石航空有限公司的子公司它的目的是在国际空间站的建设和服务站遍布其飞行执行操作。机械手SSRMS,随着MSS,加拿大对国际空间站项目的贡献的其他一些元素。机械手SSRMS,后来被命名为与加拿大二号(«加拿大手2“),是第二代的加拿大公司操纵器MD机器人。机器人第一代RMS(Canadarm)近20年来使用的穿梭巴士(见表)。此刻,有三种操作机械手Canadarm。

宇航员斯蒂芬·鲁宾逊移动过程中的使命porstranstve周围的加拿大2的帮助下站STS-114航天飞机“发现号”在2005年8月

宇航员罗伯特L.柯宾和克里斯特·富格莱桑在轨道上新西兰库克海峡的工作,创下了新的细分市场,以国际空间站上的12月12日,2006年(NASA)

来源:
20 这就是站一年前:2007年6月19日查看国际空间站搭乘亚特兰蒂斯号航天飞机。

等等 - 在其历史上最开始。 1998年12月6日奋进号航天飞机送到单位«团结»(在前台)俄罗斯集团“黎明”(在云的距离的背景),国际空间站轨道的第一段运行。

1998年12月4日美国对接集团«团结»,送入轨道的航天飞机“奋进号»ç俄罗斯集团”黎明“与航天飞机手臂的帮助。在它的货舱大画幅相机安装IMAX,这使得这个画面。

叠“曙光”和«团结»自由飞行12月4日,从1998年的航天飞机“奋进号”的观点。

国际空间站上的10月11日2000在未来的日子里的图片,该站配置发生变化。目前站由块(从左至右)«团结»,«之星“,”黎明“的货轮”进步“。块Z1桁架和第三对接端口
预计完成

查看该站2005年8月6日
的

站式“联盟号14(TMA 10),”4月9日走在码头,2007年

国际空间站与航天飞机“发现号”普遍认为6月11日2008年(NASA)

2月16日,2001年查看亚特兰蒂斯号航天飞机从国际空间站。

运输船联盟号14(TMA-10)

第12远征ISS发布了一个免费的飞行轨道上的卫星西装,叫SuitSat - 不必要的俄罗斯宇航服ORLAN,装有电池和一个无线电发射机,广播录音票学生提供一个消息给世界各地的业余无线电操作员。宇航服进入大气层并烧毁了几个星期后。

宇航员卡伦·尼伯格,留意近日停靠在国际空间站对接基博实验室发现号航天飞机于6月10日,2008年(NASA)的窗口

远征-3(白衫),STS-105(ekspditsiya访问,条纹衬衫),以及探险-2(红衫)的一组照片中的国际空间站的命运实验室8月17日,2001年(NASA)

亚特兰蒂斯与国际空间站2月9日之前的对接,2008年武装与400和800 mm镜头摄影器材,在空间站度过了拍摄航天飞机的热屏蔽板,并把他们安全的任务控制分析。

宇航员谢尔盖·克里卡列夫和他的相机。

宇航员罗伯特·柯宾拍下远征1的成员在新成立的命运实验室的三次太空行走2月12日,2001年以前,这个词宇航员连接坞口和实验室之间的几台电脑和电缆第二期间(NASA)

“幻影躯干”关于2001年5月13日,在实验室的命运在国际空间站(ISS)。它被设计用于测量辐射对器官在人体内的效果。躯干相当于平均成年男性的高度,密度和重量。它包括一个实时记录作为放射线产生脑,甲状腺,心脏,肺区域,依此类推。D的数据将被用于确定身体如何保护他们的辐射的内部器官的放射线传感器。这些信息将是一个长期的太空飞行非常重要。 (NASA)

8月11日,2007年的移动服务系统MSS(移动服务系统)的主要内容之一的中心 - 空间站机械手远程SSRMS(空间站的遥控器系统)。操盘站的设计和加拿大公司MD机器人,该公司麦当劳,Dettwiler和联合有限公司的一个部门制造根据合同的加拿大航天局(CSA *)。 MD机器人(安大略省布兰普敦),原名晶石空间系统,是晶石航空有限公司的子公司它的目的是在国际空间站的建设和服务站遍布其飞行执行操作。机械手SSRMS,随着MSS,加拿大对国际空间站项目的贡献的其他一些元素。机械手SSRMS,后来被命名为与加拿大二号(«加拿大手2“),是第二代的加拿大公司操纵器MD机器人。机器人第一代RMS(Canadarm)近20年来使用的穿梭巴士(见表)。此刻,有三种操作机械手Canadarm。

宇航员斯蒂芬·鲁宾逊移动过程中的使命porstranstve周围的加拿大2的帮助下站STS-114航天飞机“发现号”在2005年8月

宇航员罗伯特L.柯宾和克里斯特·富格莱桑在轨道上新西兰库克海峡的工作,创下了新的细分市场,以国际空间站上的12月12日,2006年(NASA)

来源: