1218
Як я розвивав пристрій для скринінгу дитячого реберця
 р.
р.У статті про те, як я розвивав пристрій для гойдалки дитячої кози з ручним механізмом.
Якщо Вас цікавить, звертайтеся до кота.
Ця історія почалася більше трьох років тому, коли моя дружина і я готувався до народження сина. Серед інших речей, я подбаю про покупку реберця, почав дослідження ринку на цій темі. Виявилося, що сьогодні продаються такі види клумб:
- Просто ребра, стоячи на ногах. Ноги зазвичай оснащені колесами.
- Скелястий ліжко з дугоподібним кралом.
- Ліжко з механізмом гойдалки.
У вас є крапки - невелика черга, яка зручно ставити поруч з вами, коли ви робите щось, а малюк - випікати.
Є манжетні ліжка, китайці. До них прикріплюються також трансформаторні ліжка, комоди і змінний стіл. І є багато екзотичних речей.
Але я був налаштований до традиційного реберця, стандартного розміру, берези або бука, з маятниковим механізмом. Ну, як «люда прогресивних, передових поглядів», я відразу ж думав, що це не з рук, щоб породити цей ребра. Звичайно, я думав, давно придумав гойдалки, ви просто повинні піти в магазин і купити.
Тим не менш, до мого сюрпризу виявилося, що немає готового пристрою на продаж. Але у мене є поради. Наприклад, зв'яжіть канат з одним кінецьом на ногу і іншим до ліжка, і, потівши його стопу, скеляючи ліжко. На комп'ютері можна навіть сидіти. Або ви можете зв'язати мотузку на стіл CD-ROM і написати програму, яка відкриється і закриє столик з певною частотою. А можна також використовувати привід протирців зі старих «Жігулі». І не робити шуму, покласти його в наступну кімнату, а мотузку від цього приміщення до розплідника через систему отворів, шків і блоків. Є ще більш радикальні поради – не накачувати взагалі. Так, ймовірно, це шкідливо і в цілому тут в Спарті, наприклад, діти не скеляли, і всі були задоволені.
На додаток до порад, що знайшли кілька патентів, але не виробляються пристрої на них. У мене є один виробник, я навіть купив їх пристрій. Але в той час неможливе – поки я розумів, виробництво, якщо це було, вони припинили.
Я придумав ідею розробити власний пристрій для скелелазіння реберця.
Я проаналізував всі патенти та інші матеріали, знайдені в Інтернеті, які можуть допомогти мені. Для того, щоб побачити, що було всередині.
Поступово розроблені вимоги до пристрою:
- Силент. Це означає, що немає моторів, передач, передач. Ви можете, звичайно, будувати звукоізоляцію, але краще робити без цього спочатку.
- Можливість дистанційного керування. І це, в свою чергу, означає можливість пристрою породжувати ребра від решти стану.
- Легко встановити на ліжко. І, як наслідок, можливість установки, якщо не всі, то не менше, більшість доступних місць.
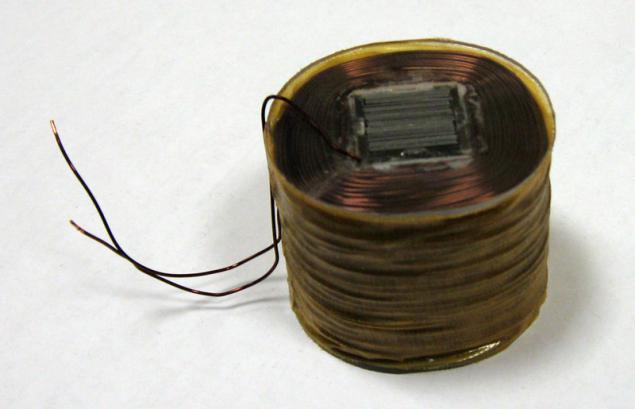
Пам'ятайте, що «перпетуальний рух» був популярним? Є котушка в підставці, і в гойдалці частина є магнітом. До тих пір, поки сидять батареї.

Принцип роботи пристрою простий - магніт, що летить над котушкою, вводить в неї EMF, який змінює знак в момент, коли магніт починає відходити від котушки. Я вирішив побудувати свій пристрій. Дуже важливо, як датчик, я вирішив використовувати той же привід котушки (і не, наприклад, інший котушка, оптопар або датчик залу). Іншими словами, мікроконтролер (і дизайн зібраний, звичайно, на ньому) спочатку «списується» до EMF в котушкі, а потім в потрібний час з'єднує однакову котушку до джерела живлення.
Я мав вирішити багато питань. В якості мікроконтролера підійшов ATtiny24. Магніт був обраний неодимій, у вигляді шайби, діаметром 15 мм і товщиною 8 мм. Окрема історія з котушкою - її параметри повинні бути ретельно відібрані, використовуючи як деякі теорії, так і кілька прототипів котушки з різними розмірами, діаметрами дроту і кількістю поворотів. Геометрія і матеріали ядра також різноманітні. Звичайно, я хотів зробити магнітну систему максимально закритою, ідеально магніт повинен переходити з мінімальними зазорами між стовпами ядра. У цьому випадку найбільша ефективність пристрою буде досягнута (а отже, мінімальна кількість міді в обмотку). Проте, заради простоти дизайну, висока ефективність повинна бути жертвою. На фото показано один з варіантів котушки (не фінальних)
 Р
РДля того, щоб гойдалки механізму перемістити ребра з місця, надано деяке зміщення котушки відносно магніту в положенні рівноваги.
Пульт дистанційного керування виконано за допомогою готового китайського пульта дистанційного керування з чотирма кнопками (починок, зупинка, більше, менше) та ресивера до нього. Тепер використовується цей пульт:
Програма для мікроконтролера забезпечує шість гойдалкових швидкостей (по суті, довжина пульсових змін штовхача). Для шостої швидкості алгоритм дещо складний - він використовує ряд коротких імпульсів з перевіркою полярності EMF в паузи між ними. Це дозволяє досягти максимальної прокатки енергії.
За останні три роки програма поліпшила як нові ідеї. Наприклад, алгоритм динамічної зміни довжини імпульсу в залежності від періоду скелелазіння реберу був протестований (і тепер використовується). Також алгоритм був створений для плавного збільшення і плавного зниження струму в привідної котушки, яка визначає повну, абсолютну тишу пристрою. Без цього вдосконалення пристрій все ще виготовляв звук, схожий на дражнити годинник. Також є ідея створення регулятора PI з зворотним зв'язком на амплітуді гойдалки, але проблема визначення цього дуже амплітуда за допомогою наявного «сенсора» ще не вирішена.
У випадку пристрою було обрано готову справу Gainta, після деякого часу він отримав гарну картину, що грається з лазером.

Блок живлення - готовий, 12 В, 2 А.
Ще кілька фото пристрою:
Нестандартні кріплення розрізають за допомогою лазерного різання і фарбують порошковою фарбою.
І відео:
Ми використовували наш гойдалковий пристрій близько року, і моя дружина була дуже рада. А потім дитина відмовилася скеля в реберцях, і пристрій не був
А потім виявилося, що такі пристрої можна продати. Але це ще одна історія.
Якщо вам подобається ця стаття, я можу розповісти вам:
Як отримати патент на корисну модель і як вона виявилася практично без використання в реальному випадку порушення моїх патентних прав;
Як я починав масово-продукційні пристрої, але я ще не отримав.
- про те, як пристрій має новий пульт дистанційного керування з екраном від Nokia 1202, а також додаткові функції.
Джерело: habrahabr.ru/post/240119/






















Трагедія, драма і героїзм в житті пари мишей
3D зображення Марса на основі фото індійського орбіту супутник Мангальяан + фото з Ростита