1149
Конкери інших планет (25 фото)
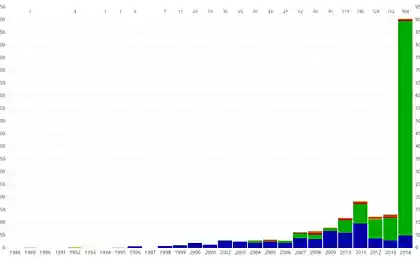
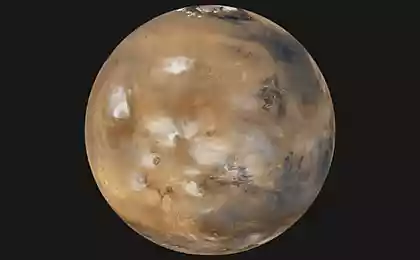
Цього року увага світу була приурочена до Марса, де американці доставлені і успішно використовували свої планетарні ровери Духа і оппортуності.
Ми можемо самі зателефонувати одержувачу.
(В одному з майстерень VNIITM)
Головний розробник шасі для планетарних роверів (колеса, двигуни, привід, підвіска, система управління) в СРСР (і залишається на цей день в Росії) Ленінград ВНДІтрансмаш (VNIITM). У цій установі були розроблені переважно шасі для танків, щоб великий досвід був накопичений в галузі створення крос-райс-транспорту, адже загальна властивість планетарного корабля і танк рухається на непідготовленій місцевості.


(STR-1 робот для очищення даху Чорнобильської атомної електростанції від радіоактивних сміття)
Багато різних пристроїв були створені і протестовані тут - Lunokhod 1 і 2 (1970), ходьба планетарний ровер, відправлений Марсу в 1971 році, стрибаючи на Phobos (1988), робот для очищення даху зруйнованої Чорнобильської атомної електростанції (1986), планетарний ровер для невдалої експедиції Марс-96, кілька планетарних роумів у співпраці з іноземними організаціями (за останні роки) і т.д.

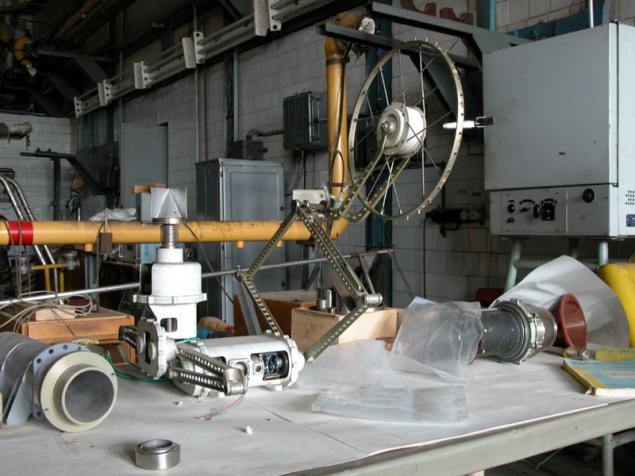
(Phobos Jumping Machine)
 р.
р.(ПРОП в. М., 1971)
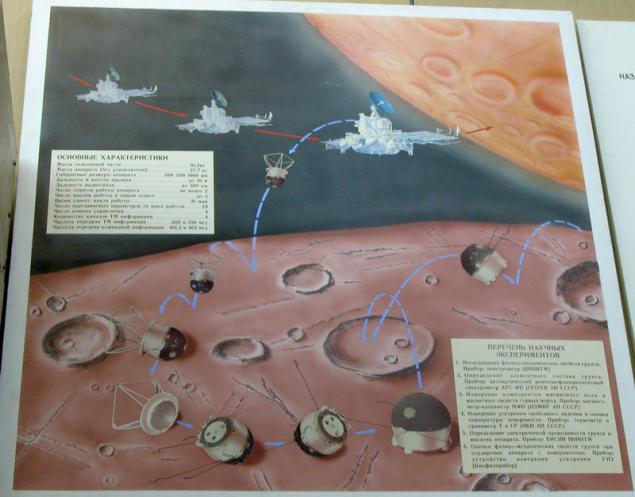
 Габаритний зображення
Габаритний зображення(Крос-відправлення)
Колесо планетарного роверу необхідно одночасно об'єднати багато вимог - сказати кілька слів про кожну, одна стаття недостатньо. Отже, розглянемо кілька варіантів коліс, створених в VNIITM з часів Lunokhodа до сьогоднішніх днів, незважаючи на основні риси.

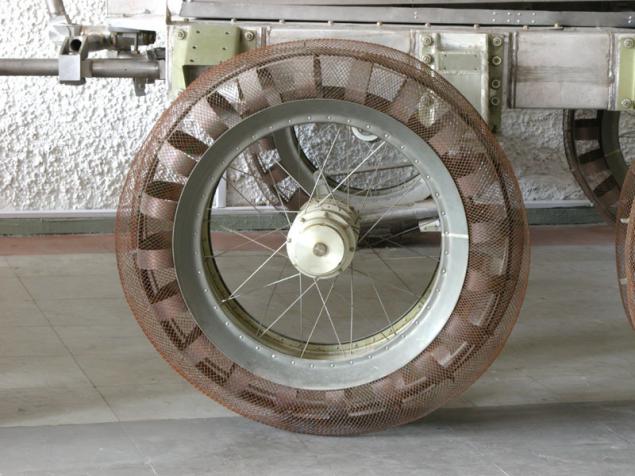
(Лунокход коліс)
Колеса Lunokhod вже можна вважати класикою. Більшість наступних моделей і реальних роумів принаймні щось, але запозичене з них. Колеса складається з трьох титанових ріжок, з сталевою сіткою, прикріпленою до них з грунтовими гаками, з однакового титану. На твердій поверхні опора відбувається на середній оболонці, на м'якому грунті оболонка проникає глибоко, а потім працює сітка.


(Трейські версії коліс для Lunokhod)
Це два тестові колеса для Lunokhod. Колесо спрун, в одному випадку, за допомогою гумок, в іншому - за допомогою циліндричних пружин вздовж осі коліс.

(Трейські версії коліс для Lunokhod)
Ще одним варіантом є те, що тут зовнішня поверхня колеса виконана з еластичної сітки, але стрічкові пружини розміщуються під сіткою, яка працює при зламі сітки при ударі. Профіль колеса заважає бічною гіркою. Наземні гачки (в середині) працюють переважно, коли сітка зігнута на твердих ґрунтах.

(Трейські версії коліс для Lunokhod)
Для планет з сильною тяжінням (березня, Земля), ламки сітку закинуті на користь твердої поверхні з гаками грунту (колесо колесо). У разі розворотів вчені продовжили з перших фото вікінга, де поверхня Марса виглядала скелястою.
Ці колеса пізніше використовуються в IARES (1993) і CTR-1 (1986).
331750 р.
(Колесо МАРЕС)
Як можна побачити, у всіх конструкціях вони намагаються забезпечити хорошу адгезію на землю (підземні гачки, сітки), низьку вагу (відсутність твердих дисків, якщо можливе і спиці, або тверде, але порожнисте колесо), спанбон (посилання, пружини і т.д.), заходи проти бічних слайдів (характеристика конвексу або конвекційний профіль).
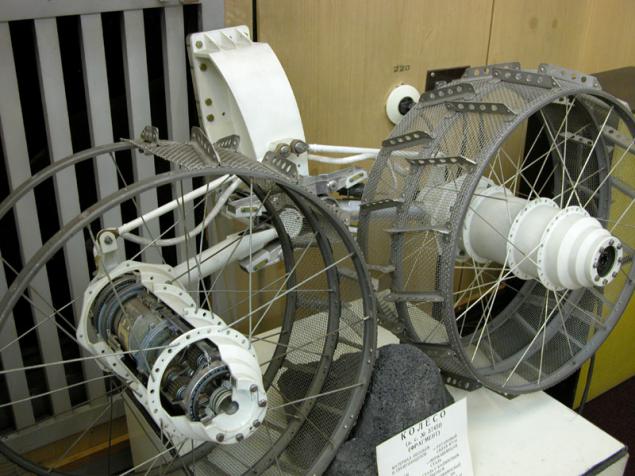
У практично всіх колісних планетарних роверах колесо являє собою єдиний (часто навіть герметичний) модуль, який також включає редуктор, електродвигун, гальмівні, необхідні датчики. Цей модуль називається «мотор-колес». Використання моторних коліс дозволяє, поряд з підвіскою, для забезпечення рівних навантажень на всіх колесах і ефективного використання потужності на нерівностях ландшафту, під час висихання частини коліс в повітрі і т.д.
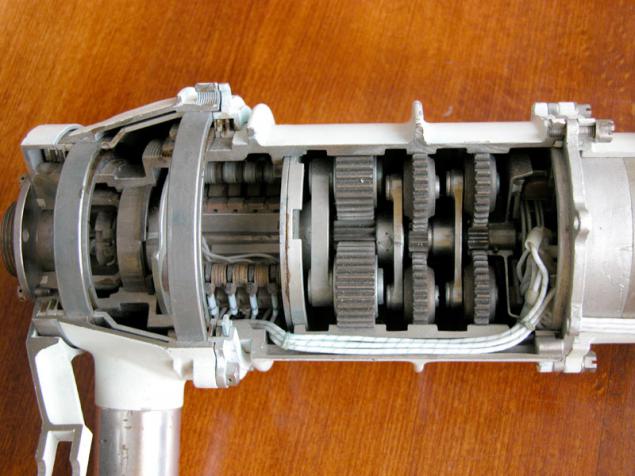
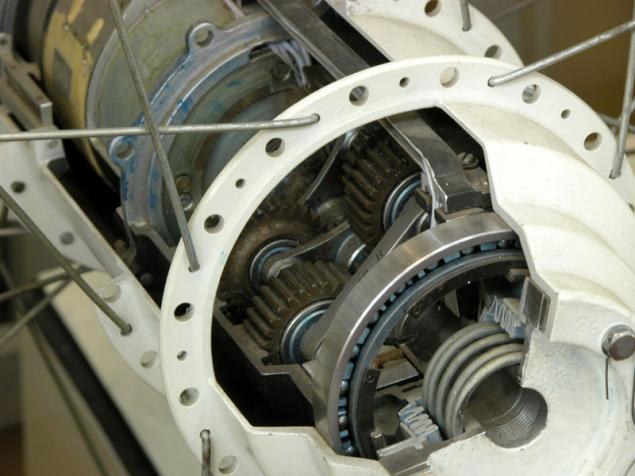
(Моторний крій)
Якщо розглядати систему пропорції коліс в цілому, виникає питання - чому виникають планетарні ровери, зокрема Луноход, так багато коліс?
По-перше, до останнього моменту використання гусениць не виключено. У разі 8 коліс Луноходу це не потрібно повного капітального ремонту конструкції. По-друге, зменшуючи навантаження на грунт. І, нарешті, надійність – продуктивність при багаторазових колесах.
У разі джемінгу в колісному диску в Луноході передбачені спеціальні механізми розблокування. Піротехнічний заряд, що працює з Землі, може перебити вал і в результаті несправний заблокований колесо стане керованим. Неможливим буде чотири колеса. На щастя, ця можливість ніколи не була використана.
Підвіска виготовлена незалежно для кожного моторного колеса. Це дозволяє долати дрібні виступи і каштани, уникаючи міцних рулонів всієї машини і перевантаження окремих двигунів. В ідеалі кожен колесо в будь-який час повинен доторкнутися до землі, і з приблизно однаковими навантаженнями від взаємодії з ним. Це забезпечується не тільки механіками, але і електронною частиною, яка оцінює навантаження на двигуни і підвіску. Механічна частина підвіски зазвичай виконується у вигляді важелів, а в якості еластичних елементів використовуються крутильні - сталеві або титанові стрижні, які є «весна», що працюють на крутинці. Застосування гідравліки проблематично, завдяки сильному перепаду температур на поверхні планет.
 Р
Р(Торсія)
Історія смерті Lunokhod-2 є інструктивним - на ньому встановлено новий датчик каблука-диферента (вся система автоматизації Lunokhod-2 була розроблена з потрійним дублюванням - як для механічної машини).
Датчик в Луноході-1 був розроблений самим ВНІІТМ, але вони вважали, що машинобудівне підприємство повинно виконувати свою роботу і іншу організацію було докладено з розвитком нового датчика.
Новий датчик, що використовується нефризована рідина. Однак не враховано низьку тяжкість на місяць. В результаті відразу після посадки датчик не працює. Але цей датчик повинен захистити Луноход від перевороту - автоматично зупиняти його, якщо нахил занадто великий (в проході - дозволяє отримати уявлення про геометрію місячної поверхні). Тут він показав, що Ровер під кутом 40 градусів до виходу з землероба.
Я мав їздити без датчика, орієнтуючись тільки на те, що видно через камери - горизонтальна лінія і простий рівень - прокатний металевий кульок. Все було добре, але в третій місяць Луноход пішов в досить великий кратер. Він став там з відкритою сонячною панеллю і заряджається. Коли прийшов час залишити кратер, кут нахилу був недооцінений. В результаті автомобіль зловив сонячну батарею, отримав грунт, що призвело до падіння потужності. Прихильники збивають грунт тільки загострені ситуації - грунт потрапив в внутрішній відсік. Таким чином завершив своє життя Луноход-2.
До речі, Lunokhod-1 був ще менш щасливим - при запуску транспортного засобу вибухнув. Так що Луноход-1, що на місяць не зовсім перший Луноход.
У будь-якому випадку, Lunokhod-2 проходив на місяць набагато більше відстані - 40 км, ніж Lunokhod-1 - 10 км. в 10 місяців. Досвід, отриманий дослідниками та драйверами.

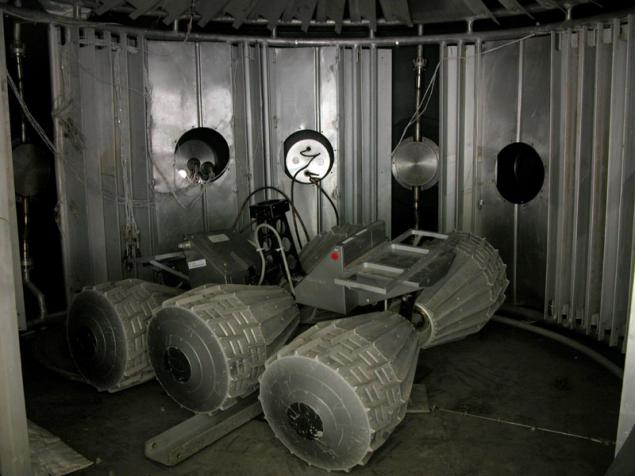
(Камера для імітації атмосфери планет і роверу в ньому)
Великий радіус повороту буде проблемою, якщо є скеля або криві поруч, де машина може пролежати при повороті.
Найпоширеніше рішення запозичене з трасованих автомобілів: що робить різні швидкості коліс на лівій і правій стороні автомобіля (в найпростішому випадку, використовуючи гальма), ви можете розгортати його практично на місці.
Цей підхід також спрощує дизайн, підвищує його надійність, так як не потрібно робити поворотні колеса. Відомий приклад – «Лунокгод» (1970).
(Лунокход)
Планетарні роверси були випробувані в Центральній Азії, в Камчатці (на ділянках свіжої еупції) - так, щоб був великий вибір рельєфних форм. Не був відомий заздалегідь, який вид грунту, наприклад, на місяць. У нас були пропозиції про те, що грунт підвішений і Луноход може просто посунути. Таким чином, тести також проводилися на сноубордах - де сніг накривається вулканічним піском.
На планетах, де тепер можна доставити планетарні ровери, є багато каменів, скельні виступи, кратери. Той факт, що для ходового апарату майбутнього, ймовірно, не буде проблемою (привіт, людина легко долає більшість перешкод, які є неприпустимими для коліс) на сьогодні планетарні пороги проблема дуже актуальна.
Уявіть ситуацію, де звичайний автомобіль працює одна сторона на великому камені. Є вал всієї машини і пристрій знаходиться на ризику перевернути. Для планетарного ровера така поведінка неприпустимо, тому що підвіска набагато складніше - коли одна з коліс переходить камінь, решта може перенести пристрій досить горизонтально.
Але навіть це не може врятувати, якщо камінь буде під дном планетарного ровера і що "прибрати на животі". Таким чином, заземлення (знімання) намагаються зробити максимум. Підвищений кліренс, в свою чергу, може привести до нестійкості пристрою - центр тяжіння повинен бути розташований максимально низьким (включили навіть проекти, які кладуть акумулятори всередині моторних коліс, але це призводить до інших проблем).
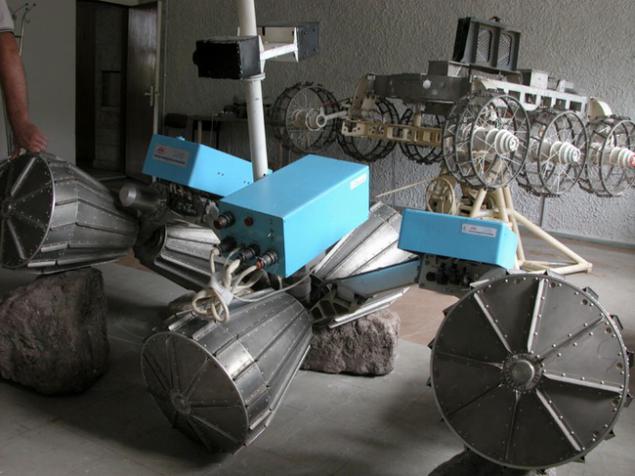
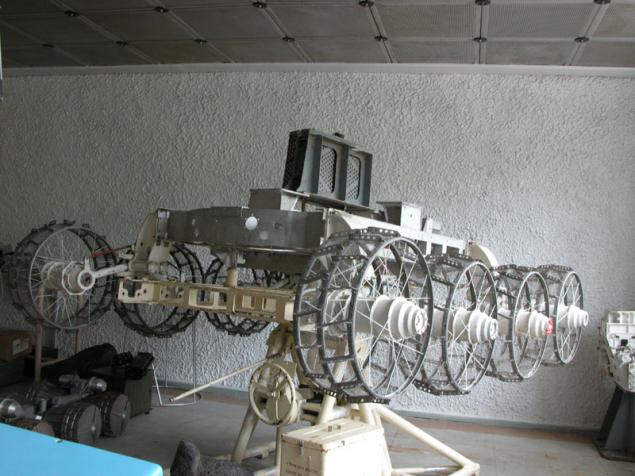
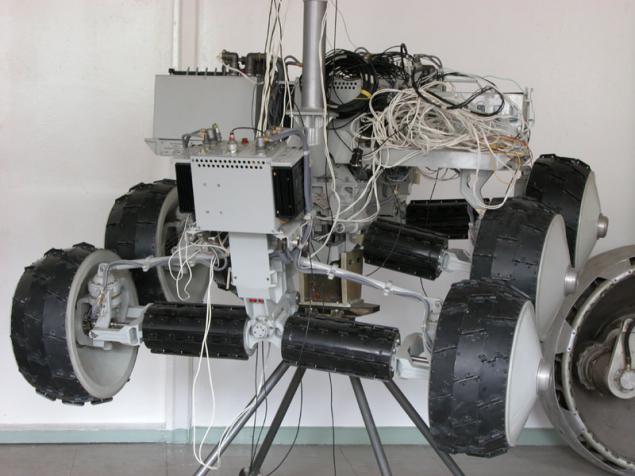
Цікавим рішенням може бути ілюстрований на прикладі, можливо, найсучасніший апарат, який був розроблений VNIITM під іменами "World" (1988), "LAMA" (1994-1995), J-Rover (1996).

? Мір/ЛАМ/ДЖ-Ровер
Ось практично відсутні - немає дна, замість нього - конічні моторні колеса. Якщо камінь падає під ними, не відбувається застрягання, так як гаки грунту розташовані по всій довжині колеса. Тим не менш, недолік - мало місця для розміщення корисного навантаження (можливого рішення - розмістити акумулятори всередині коліс). В іншому розвитку - IARES - замість конічних коліс використовуються звичайні, разом з валками, також мають ґрунтові гачки.
(АВІ)
Цікаво, що конічні колеса були придбані з VNIITM by MacDonald Douglas, які збираються зробити планетарний ровер. Тим не менш, Американські ровери розвивалися в JPL, що вирушили свій шлях. Під час проведення Луноходу в секреції проводилися розробки з двох сторін, щоб вони були повністю незалежними.
Кожна пара коліс може самостійно обертати під кутом близько 40 градусів, а також перемістити і вниз відносно іншої пари. Серед інших речей, це дозволяє компактно складати при перевезенні в космічних апаратах.
Ще одна можливість цього колісного автомобіля досить, непарно, ходьба. У зв'язку з додатковими двигунами, зрізи можуть трохи відходити один від одного. По черзі блокувати деякі пари коліс і виштовхувати інші пари вперед, ви можете, нехай не швидко, але подолати зручну перешкоду.
Ще один кроковий варіант був реалізований в EOSAIII-1 (1978).
 Р
Р
(EOSA III-1). Примітка: закриті ущільнення жерсті
Тут кожен з шести коліс може працювати в двох режимах - рулон (поворот навколо центру) або прогулянка (поворот навколо точки зміщення відносно центру колеса)
Всі
Джерело
до