1169
NASA正在资助一个项目,创建机器人来研究小行星
美国航空航天局最近宣布工程开工创造的机器人,研究小行星。在这个机器人会的工作,必须满足某些困难的工作小行星的表面上。
该小行星的重力不能保留任何东西的事实动积极跟踪,喷射或走步机。一个小小的失误,多一点积极的推动 - 和所有的机器人飞入太空,并在那里,在虚空中,送出获得有关小行星的信息的希望。
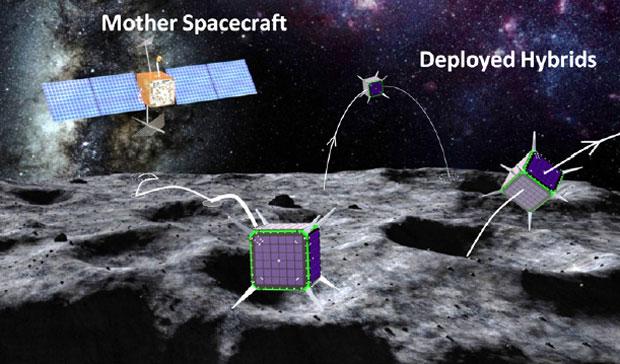
在美国航空航天局决定利用工作,对小行星是不是我们熟悉的轮式,履带式,行走和所有其他类型的设备,以及惯性系统。从外面看,它看起来像一个立方体滚来滚去。所有工作围绕这样:
或者是这样的:
不用说,这样的惯性系统必须按照微重力条件下进行修改。顺便说一下,关于所使用的系统空间望远镜和在空间运行的一些其它设备。改变位置在空间中的这样的设备中使用的飞轮。计划沿小行星表面移动探头的方法 - 不旅行的最精确的方法,但是非常有效的条件。
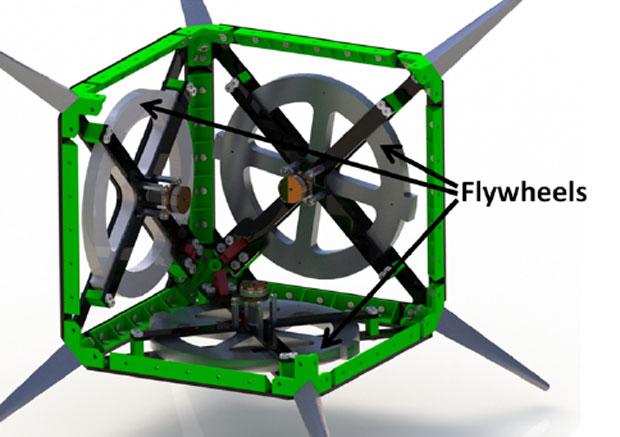
此外,该立方体的外侧部分是没有移动部件,所消耗的能量是很少的。以保证能量的惯性立方体将使用放置在身体的太阳能电池板。此外,这样的探针可以被集成,将研究在不同参数的对象的科学仪器。
按照计划,这些探头,这支部队将是简单的,而不是非常昂贵。小行星将提供他们的母船,抛出一组立方体来实现这一目标。命令为立方体将通过这样的船舶进行传输。
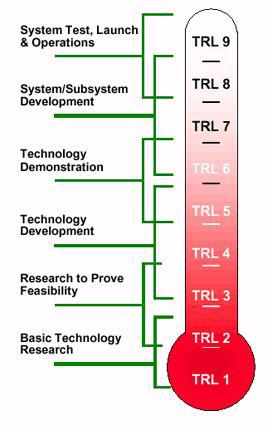
目前的融资,该计划不打算把这个项目的最后一个阶段 - 创建多维数据集的最终版本。远非如此。在美国航天局的计划,该项目的目标 - TRL升级(技术准备水平的)3.5。现在TRL = 2,这意味着“制定的工艺设计理念。” 3级 - 这是概念的理论和实践证明。等级4 - 创建原型和原型,能够与模拟环境的功能要素
。
一般情况下,该项目的最后阶段 - 概念证明“弹跳立方”的布局,甚至一台电脑一个立方体的模型的某些部分可能制造。
顺便说一句,TRL的水平,为8,意味着整个生产运作系统,该系统已经通过了所有的测试,在条件相似,以假乱真。飞行小行星之前,还远,大量的时间,使项目弹跳立方体,必须实现所有的机会。
通过<一href="http://spectrum.ieee.org/automaton/robotics/military-robots/nasa-funds-robotic-tumbling-cubes-for-space-exploration">ieee
资料来源: habrahabr.ru/post/234349/